Alors, comme promis, un retour pour ceux qui voudraient faire la même. Merci @arnog23 et @loustic03 pour votre aide.
loustic03 a déjà donné de nombreux détails, mais je vais tout rassembler ici :
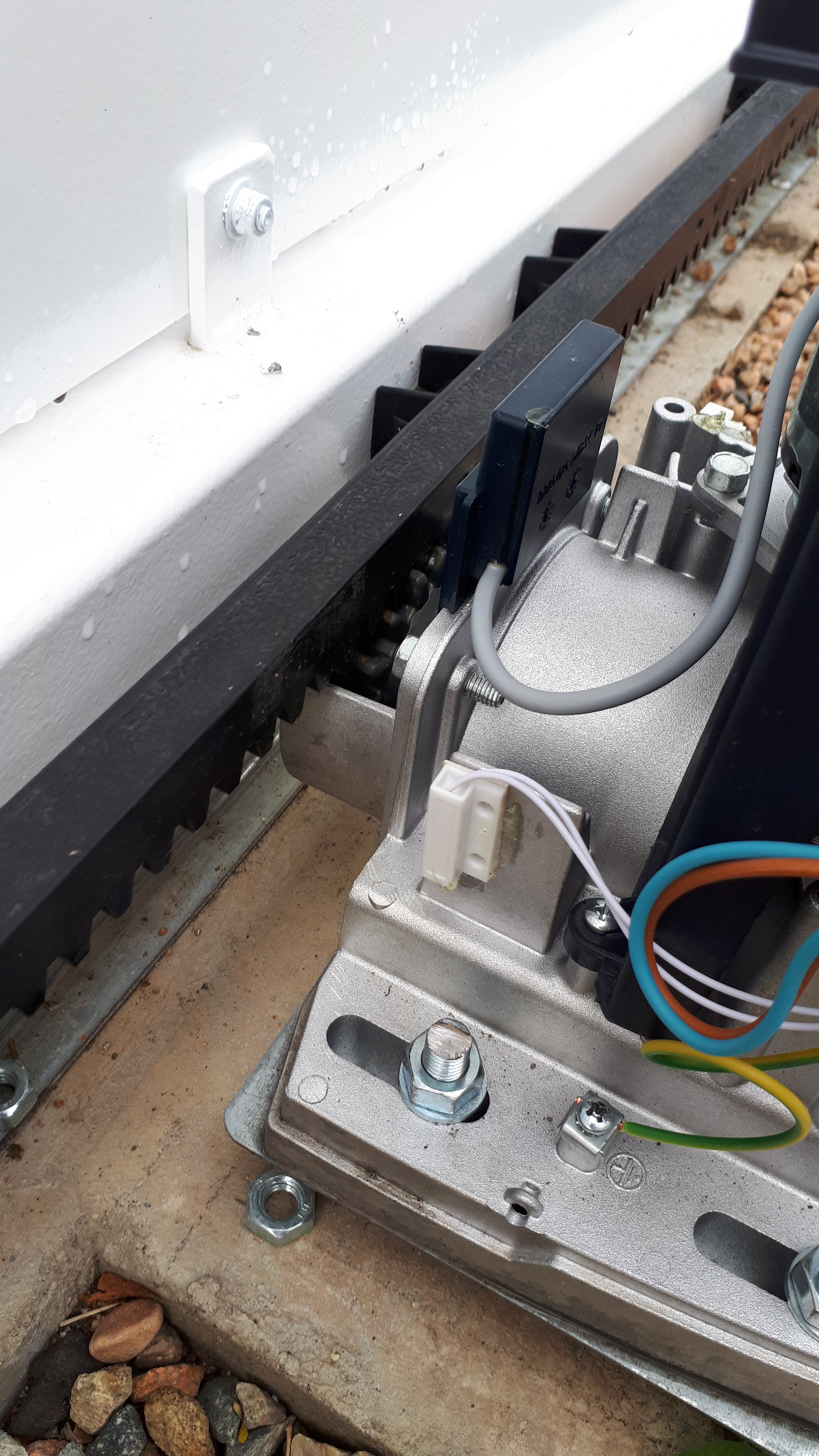
Pour commander et récupérer l’état d’ouverture d’un BFT Ultra A400 ou A600, le FGBS-222 Smart Implant de Fibaro est un module qui fait parfaitement l’affaire. Il est minuscule, et s’intègre bien dans le boîtier métallique du moteur.
- La connection
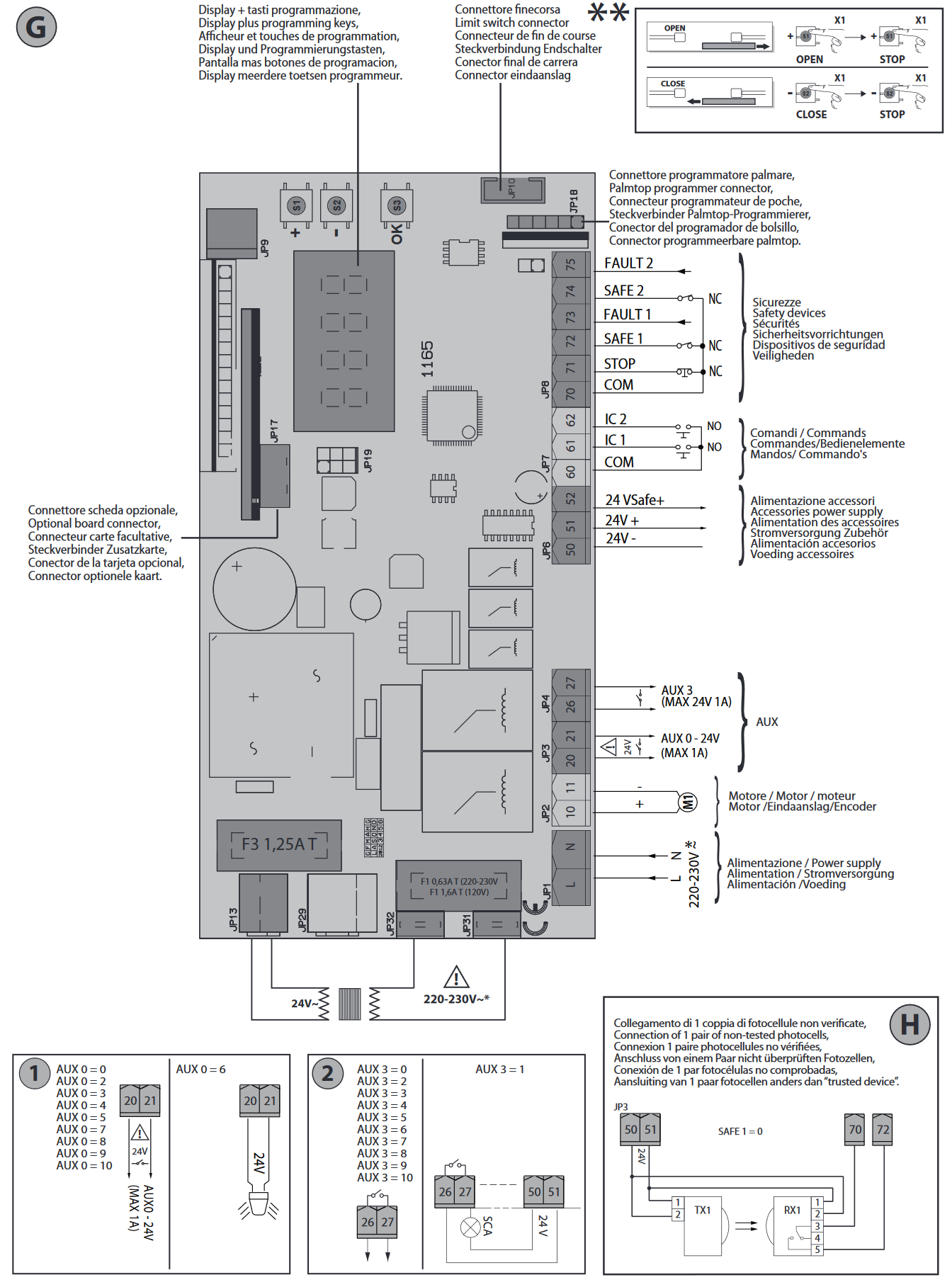
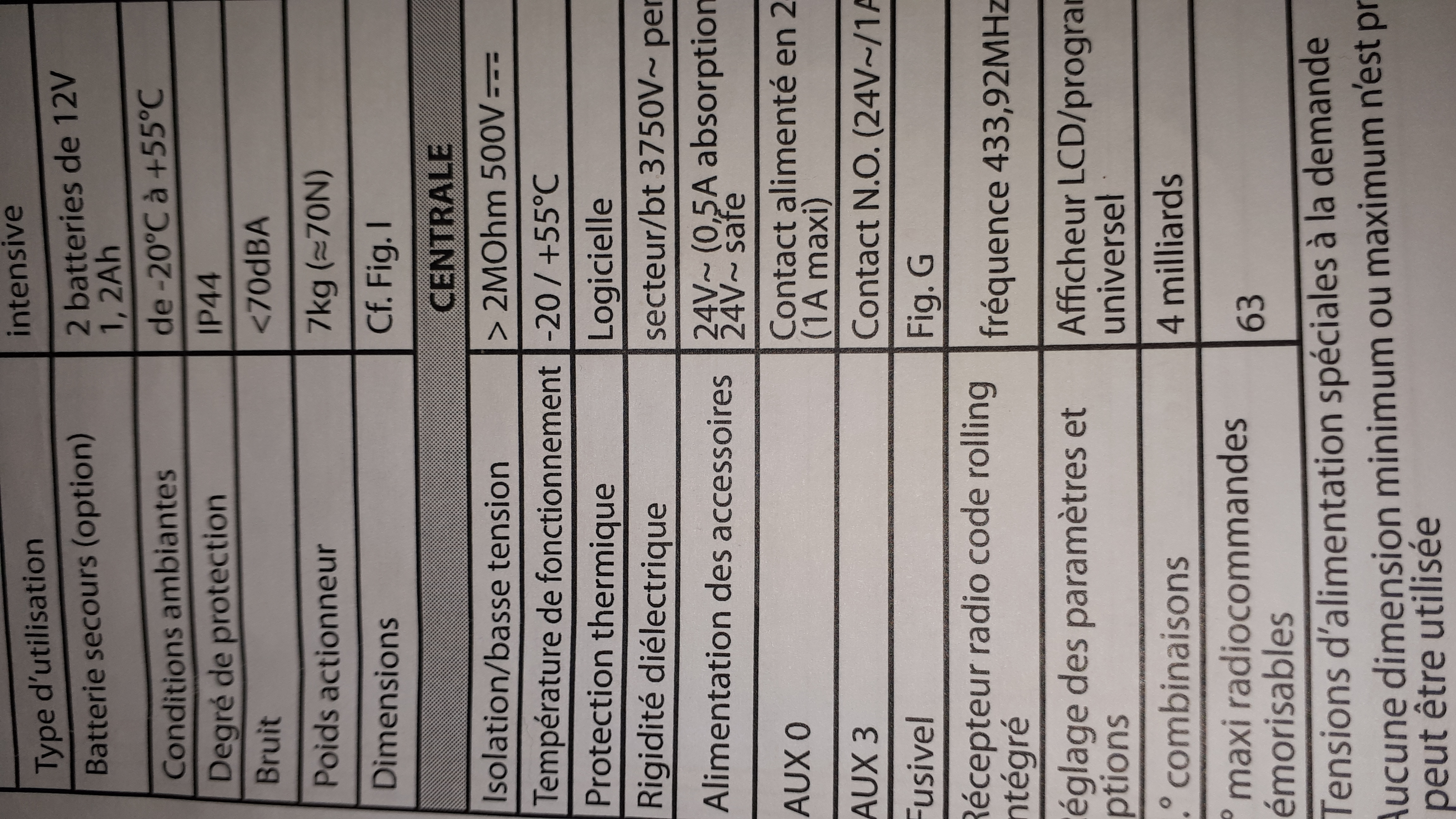
Attention, le module doit être alimenté en 9-30v continu ! Testez les bornes 50 et 51 du boîtier de commande du portail pour savoir si c’est du continu ou de l’alternatif, et lisez la doc de votre portail, à la partie spécifications, sans tenir compte de ce qui est indiqué ou non sur le schéma !
Du coup, j’ai pris une alim 12v 500mah, qui suffit parfaitement, je l’ai branchée en dérivation sur les bornes d’alimentation, et je l’ai casée dans le boîtier, il y avait de la place.
Le retour d’état se fait par la connexion entre le IN 1 du FGBS et les bornes AUX 3 (bornes 26-27) du portail. Attention là encore à ne pas utiliser le AUX 0 (bornes 20-21), qui fournissent une tension fixe de 24V, ce qui risque de détruire le Smart Implant !
Enfin, les sorties du FGBS sont connectées aux bornes IC 1 et IC 2 (la borne 50 pour le GND de la sortie, puis 51 pour OUT 1 et 52 pour OUT 2)
- La configuration du moteur
Mon besoin est simple, je veux :
- Ouvrir le portail entièrement
- Déclencher l’ouverture « piéton » (par défaut 20% du portail qui s’ouvre)
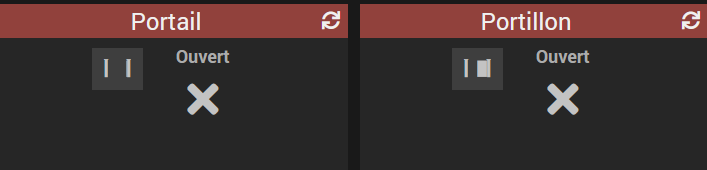
- Récupérer l’état d’ouverture
L’état pour moi signifie simplement « mon portail est-il bien fermé ? ». Pour ceux qui veulent savoir exactement si le portail est en fin de course ou pas, loustic03 a donné une solution élégante plus haut dans ce topic.
Mon portail est aussi configuré pour se fermer automatiquement au bout de 15 secondes.
Pour parvenir à mes fins, voici la configuration du moteur :
LOGIQUE => IC 1 => 2 : Permet de déclencher une ouverture complète à réception d’un courant électrique sur les bornes IC 1.
LOGIQUE => IC 2 => 4 : Déclenche l’ouverture piéton à réception d’un courant électrique sur les bornes IC 2 (pourcentage d’ouverture configurable avec le paramètre « ouv partielle »)
Dans les deux cas le portail se ferme automatiquement ou bout d’un certain temps (configurable avec le paramètre tca et activable avec la logique tca).
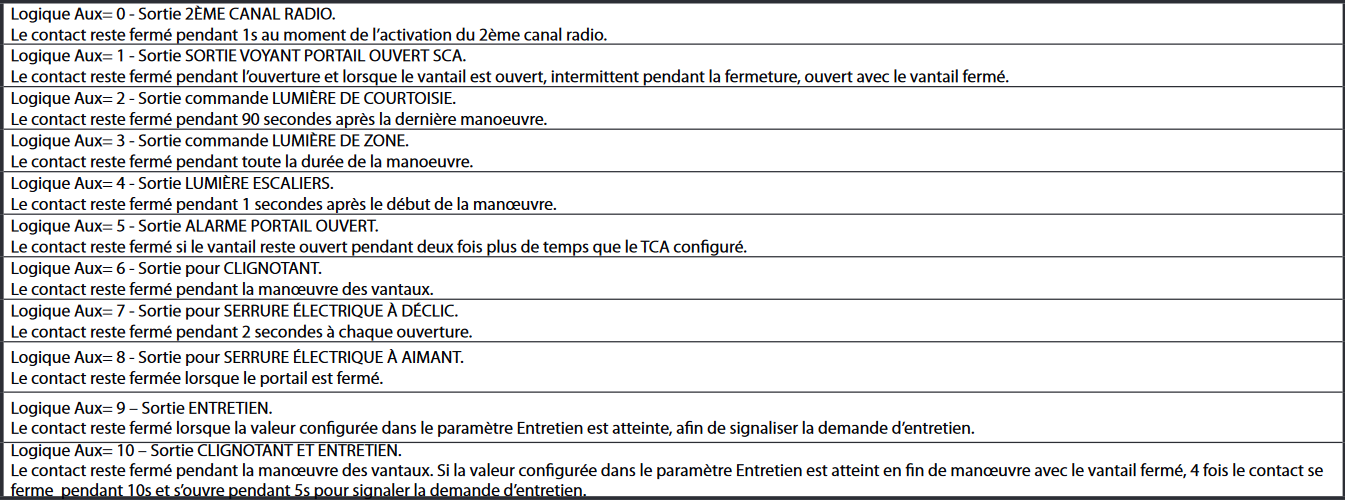
LOGIQUE => AUX 3 => 3 : Sortie commande « lumière de zone ». Envoie un courant électrique aux bornes AUX 3 « pendant toute la durée de la manoeuvre », c’est à dire depuis le début de l’ouverture jusqu’à la fin de la fermeture.
- La configuration du FGBS
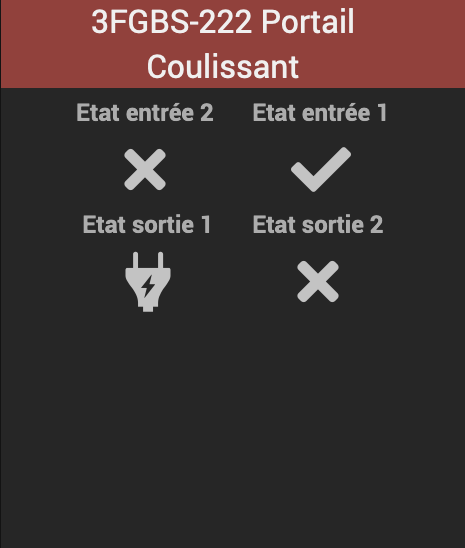
C’est le point qui m’a donné le plus de fil à retordre. Après l’inclusion, le module refusait de changer les sorties d’état. En fait il s’avérait que les entrées étaient corrélées aux sorties. Voici ce que j’ai fait pour y remédier:
- D’abord, inclure en mode non sécurisé. C’est bizarre, mais l’inclusion en mode sécurisé prive la configuration d’un paramètre essentiel à mes fins, c’est à dire la décorrélation de l’entrée 2 et la sortie 2 (alors que pour les entrée/sortie 1 c’était OK…)
- Une fois inclus, aller dans la configuration, et changer les valeurs des deux paramètres « Protection » à « No Operation Possible »
- Désinclure et réinclure le module en mode sécurisé
Voici ensuite les paramètres du module :
Le paramètre 20 permet d’indiquer que tant que le circuit n’est pas fermé, la valeur que renvoie le module doit être 0 (« Normally open alarm system »).
Les paramètres 154 et 155 indiquent au Smart Implant de garder ses deux circuits OUT ouverts (contacts normally open).
Enfin, les paramètres 156 et 157 indiquent au Smart Implant de réouvrir automatiquement les circuits après la demande de fermeture. Cela permet de ne pas envoyer un courant en permanence lors de l’envoi d’une commande.
Par contre, la réouverture des circuits ne changent pas l’état des sorties dans Jeedom. Cela signifie que si vous avez commandé une fermeture d’un circuit (une ouverture du portail donc), l’état de la sortie après la commande sera toujours « fermé »…
- Le « virtuel »
Pour remédier à ça, j’ai créé deux « Virtuels », après configuration du module. Le premier sert à ouvrir le portail entièrement et le second commande l’ouverture piéton. Les deux ont le même retour d’état, cependant. J’ai fait ce choix de deux virtuels car dans ma dernière étape de connexion à Homebridge, Homekit ne permet pas de commander l’ouverture partielle d’une porte de garage, et j’avais besoin que le portail soit reconnu comme une porte de garage pour l’ouvrir depuis Carplay…
La configuration d’un virtuel est très simple, et me permet juste d’enchaîner une commande de fermeture du circuit, et une commande d’ouverture.
Voilà, l’inclusion des deux virtuels dans mon objet « Maison » me permet de les avoir directement dans Homekit !