Le Design, c’est vraiment le dernier truc dont je m’occupe à vrai dire vu que je fais tout sur mon écran Nextion.
Moi j’aime bien ton widget :)
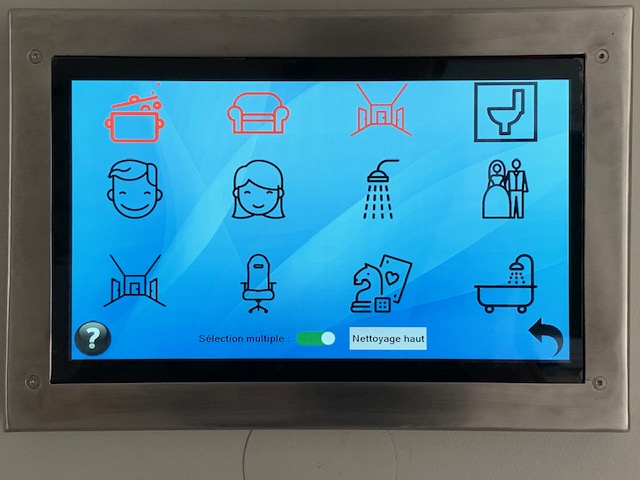
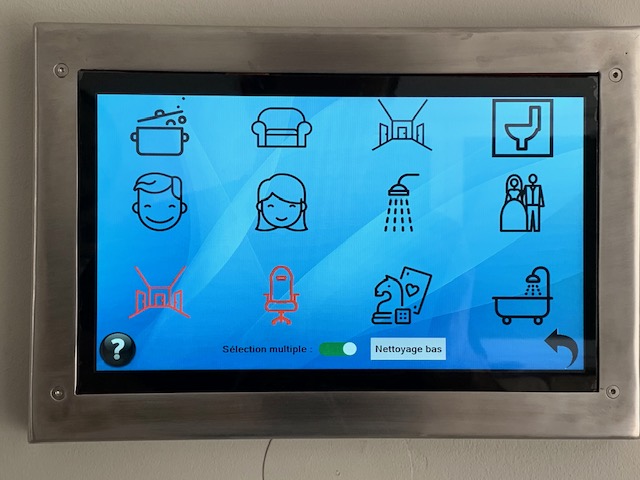
Tu veux pas faire un screenshot juste de la partie des pièces que l’on voit ce que tu as fait ? avec les boutons commandes icones etc…;
merci
faut que je trouve un bon délire pour les couleurs ![]()
en gros :
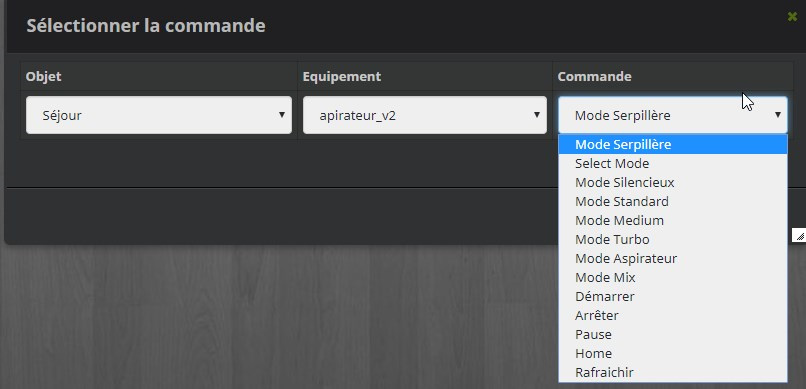
- j’ai assigné une info (defautpieces) que j’ai mis dans mon virtuel du robot :
- au niveau des pièces j’ai fais les 4 pièces du RDC (action dans le virtuel) et j’ai assigné cette info :
=> je n’ai pas encore validé le numéro d’id de chaque pièce je ferai ça quand je serai au calme chez moi !
- pour les icons j’ai choisi un peu au pif je me concentrerai plus tard sur la taille, voir créer un widget moi même (je suis en v4)
- c’est à chaque action des pièces que j’ai assigné une commande sur le « vrai » robot (via la roue crantée) :
- après pour le widget lui meme, j’ai joué un peu avec le css sans trop creuser. c’est dans « configuration avancée » :


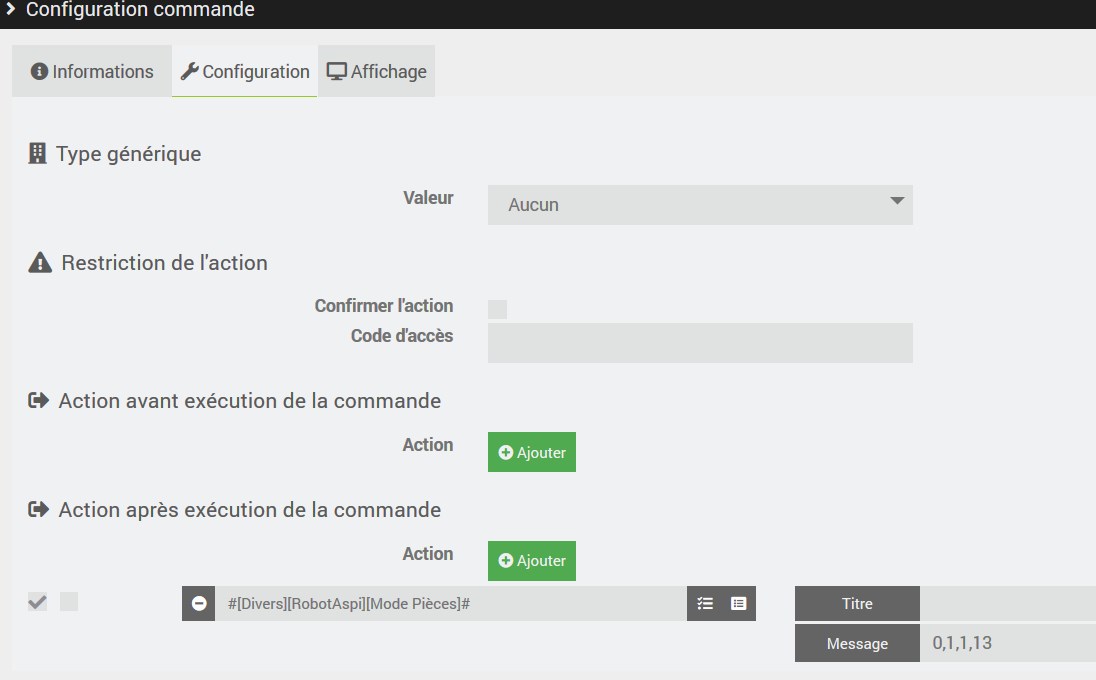
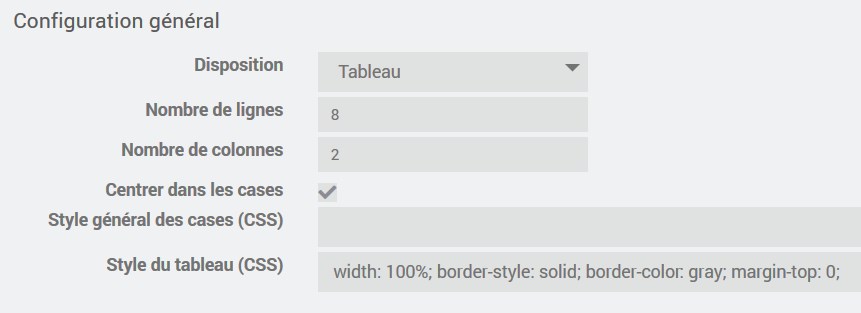
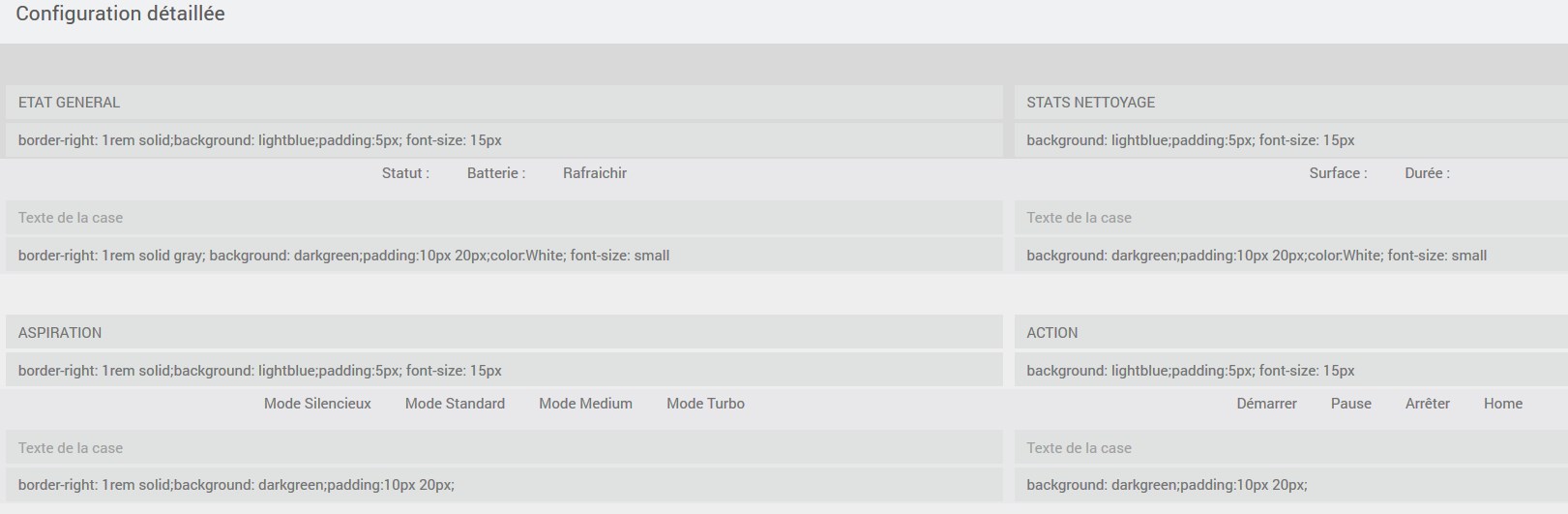
mais tu peux jouer avec plein de trucs ![]()
perso j’ai pas encore fini mais j’en fais par tranche de 3-4mn … je fais un carré, je fais autre chose etc
1 « J'aime »
Merci pour le partage en tout cas 
Bonjour,
En lisant certains posts de ce fil, si je ne me trompe pas, vous avez recréé les commandes, en effaçant les anciennes pour que le mode piece apparaisse. Je l’ai fait plusieurs fois, j’ai meme supprimé et re-ajouté le robot, mais le mode pièce n’apparait pas. Auriez vous une idée de mon erreur?
Merci pour votre aide.
Djo
Bonjour à tous,
J’ai beau vous lire et vous relire ( ainsi que la doc du plugin ) quelque chose m’échappe …
Je ne comprends toujours pas comment vous déterminez l/ récupérez les ID de pièce. Alors faut savoir que je comprends vite, mais faut m’expliquer longtemps
Concrètement, par rapport à quoi sont déterminés ces pièces ? La map de l’appli xiaomi home ?
J’ai simplement 3 zones / pièces dans mon appli, que je souaiterais déterminer dans Jeedom pour pouvoir lancer indépendament le robot dans tel ou tel pièce, sans avoir à passer par l’appli.
Je vois bien l’ID de map qui apparait dans les logs, mais celui ci semble plutt correspondre à la map en elle meme ( car c’est toujours le meme ID, peu importe ou je l’envoi ) et non pas une pièce en particulier sur la map.
Dans la doc il est dit « Pour trouver les ID, il faut tester et essayer » mais je n’ai pas compris quelle résultat de quel commande peut m’indiquer ces ID, selon les pièces que je souhaites déterminer.
Merci d’avance à ceux qui pourrons m’éclairer à ce sujet
Pourtant c’est bien écrit dans la doc mode pièce, sans titre mais avec le message dans la doc de lunarok.
Tout est très bien expliqué. Après, oui, il faut tester les id…
Salut,
Pour la MAP, le numéro est affiché sur le widget si tu actives bien la bonne commande info.
Si tu changes de MAP sur ton application, cette valeur change. Cherté comme ça que tu récupères l’ID de la MAP.
Pour les ID de pièces, elle commence à 10. Donc tu exécutes la commande indiquée dans la doc (correspondante au numéro de pièce) avec le numéro 10.
Tu regardes où le robot va nettoyer pour savoir à quoi le numéro correspond.
Et si tu n’as pas renommé tes pièces dans l’application officielle, si ne je dis pas de bêtises, la « room 7 » correspond à l’ID 17 par exemple.
Salut, et merci pour vos réponses.
Donc les ID de pièces dans jeedom sont bien basés sur les différentes pièces paramètres dans mi home ?
C’est simplement cette info que je cherchais et ne comprenais pas.
En fait mon robot est dans ma pièce a vivre qui regroupe le salon, la salle a manger et la cuisine. J’ai donc une seul Map, sans laquelle je n’avais jamais découpé de pièces car le robot se perdait a la suite de ça. Je n’ai pas réessayé depuis plusieurs maj …
Mais du coup je ne comprenais pas comment il s’y prendrait pour délimiter des pièces si elles ne sont définies nulle part 
Merci pour votre confirmation, c’est plus clair.
Bon … Avec quelques tests, j’ai effectivement pu déterminer mes ID de pièces, qui sont donc bien basés sur les différentes pièces de la map de l’appli xiaomi home.
ça semble fonctionner plutot bien , merci @Kyoshi d’avoir pris le temps de mexpliquer ça.
Ceci dit ( vous le voyez venir le mec qui est jamais content ? ), on passe encore et toujours par la map de l’application xiaomi home, qui est je trouve vraiment mal foutu, particulièrement par rapport aux zones d’exclusions. ( J’éspère qu’on aura le droit dans une prochaine mise à jour aux commande go there et la possibilité de définir les maps directement dans jeedom comme pour ce qui a été sur les roborock ar exemple. )
), on passe encore et toujours par la map de l’application xiaomi home, qui est je trouve vraiment mal foutu, particulièrement par rapport aux zones d’exclusions. ( J’éspère qu’on aura le droit dans une prochaine mise à jour aux commande go there et la possibilité de définir les maps directement dans jeedom comme pour ce qui a été sur les roborock ar exemple. )
Et justement en parlant de ces zones d’exclusions, je constate qu’elles sont bien prises en compte au travers de la commande mode pièce, du coup je me demandais … Par rapport au mode serpillère, quand je le lance j’ai une zone d’exclusion supplémentaire qui couvre le tapis du salon, et que place et enlève à la volée à chaque fois que je lui fait faire la serpillère. C’est moins pratique et évident ici, car le but est de ne plus passer par l’appli systématiquement.
Du coup, je me questionne sur la faisabilité de la chose suivante : est il envisageable selon vous de créer une seconde map, couvrant les zones d’exclusions relatives au mode serpillère, et de le gérer dans un virtuel avec le mode qui va bien ?
Merci d’avance pour ceux qui pourront me répondre ( et même les autres tiens )
Hello,
Je ne comprends pas cette affirmation. Pourquoi tu passerais encore par l’application hormis si tu veux voir le tracé effectué?
Je dirais que oui. Mais il va falloir feinté et faire croire à l’aspirateur qu’il se trouve sur au sein d’une nouvelle map.
Si pour toi, ce n’est pas gênant de le faire démarrer ailleurs, ce sera plus simple.
Dans tous les cas, tu peux tester de faire un faux mur au niveau de ton tapis par exemple (avec des cartons ou autre).
Est-ce que cela sera suffisant pour tromper l’aspirateur? Pas certain… A tester.
A noter que le S5 Max évite les tapis en mode lavage…
En espérant voir un jour une mise à jour en ce sens sur le STYJ02YM…
Je me suis mal exprimé. J’entends par la, on ( j’entends par la jeedom ) se base encore sur la map de xiaomi home, sur laquelle la mise en place de zone restreinte et de murs virtuel est franchement naze …
Qu’entends tu par la ? Genre déplacer la base, et tout ce que ça implique ? Hors de question, j’ai déplacé ma base de 10 cm une fois, j’ai du refaire toute la map ça m’a mis hors de moi ![]()
Le fait de m’embêter à bloquer l’accès à mon tapis n’est pas envisageable non plus, j’ai pas payé un robot presque 300 balles pour ça ^^
J’ai lu un peu de tout et son contraire à ce sujet, mais pour le coup je n’ai jamais osé tester. Pour un peu il le fait ? Dans tout les cas il détecte bien quand il est sur un tapis car il passe en mode turbo quand il arrive dessus.
Je vais tester demain le mode serpillère partout, pour voir si il s’arrête ou pas avant d’arriver sur le tapis.
Hors sujet : mais je n’en reviens pas d’être le seul à me poser ces questions ! tout le monde a laché l’affaire sur Jeedom et est partit sur home assistant ??? Ce système ne me botte pas du tout…
Oui, mais tu le fais une seule fois et après bye bye l’application.
Ben, tu l’as ta solution alors pour créer une nouvelle MAP.
Si le fait de bouger de 10cm la base te fait refaire la MAP, tu lui dis à la fin de l’enregistrer comme nouvelle MAP où tu mettras tes zones restreintes. Et cette MAP là, tu l’utilises quand tu laves.
Et le tout, en automatique ![]()
Quand je parle de bloquer l’accès avec des cartons, c’est seulement une fois… Pour qu’il refasse la MAP.
Je ne savais pas qu’il passait automatiquement en mode turbo en passant sur les tapis.
Je n’ai jamais fait attention et à voir s’il le fait sur des tapis fin que l’on met dans une entrée.
Tiens-moi au courant, cela m’intéresse.
De quelles questions tu parles?
Pour ma part, tout fonctionne comme je veux.
Par rapport à HA, je n’ai pas la MAP d’affiché, c’est vrai mais si je veux vraiment vérifier ce qu’il a nettoyé (pas de raison qu’il ne fasse pas ce que je lui ai demandé), je lance l’application officielle…
Via Jeedom, l’aspirateur fonctionne que je le souhaite et les ordres peuvent être donné par toute la famille sans avoir accès à Jeedom :



Ce qui me dérange, c’est qu’une zone de restriction aura une largeur minimum ( qui représente IRL pas moin d’un mètre ), idem pour les murs virtuels, minimim un bon mètre.
Pour la délimitation des pièces, idem ce n’est pas très souple, c’est forcément d’un mur à l’autre en ligne droite, dans mon cas ce n’est pas représentatif.
Pas bête … Mais dans ce cas, dans la logique rien ne m’empêche de recréer une seconde map, avec la base au même endroit, mais avec des zones de restrictions à des endroits différents. Je vais tester ça demain si mon fils me laisse un peu de temps ![]()
En fait, quand j’ai eu mon robot au début, j’ai mis des petits cache devant les capteurs situés sous le robot car celui ci refusait de passer sur mon tapis, car il est noir. Visiblement, il prends celui ci pour un escalier et refuse d’y aller. Depuis, suite à une MAJ, j’ai constaté que quand le robot arrive sur mon tapis, il monte ( ou baisse d’ailleurs, ça dépends des fois ) la vitesse d’aspiration. Donc il sait déterminer si il se trouve sur un tapis ou pas. Si ça se trouve je m’embête pour rien ![]()
Dans tout les cas oui je te tiens au courant.
Je parle de chercher à différencier les zones pour lancer le mode serpillère ou aspi simple sans me soucier de si j’ai mis une zone d’exclusion sur mon tapis ou pas. Mais la encore, pour un peu je m’embête avec ça pour rien depuis longtemps … ça expliquerait pourquoi je suis le seul à me poser ces questions ^^
Bon OK, je ne joue clairement pas dans la même cours que toi ^^
Je n’ai pas encore commencé la partie design, je souhaites d’abord être à l’aise avec le système et le matos, la je galère encore pour mes virtuels lançant l’aspi sur tel ou tel pièce pour les intégrer à une tuile comme celle de @MonsieurFlal, je suis entrain de potasser sa description.
J’ai attaqué Jeedom il y a 3 mois seulement, j’ai fini en PLS dans un coin de mon bureau la première fois que j’ai lu la doc du plugin virtuel ![]()
Moi non plus, je n’ai pas touché au design en fait.
Je n’ai pas mis de tablette au mur (j’ai expliqué ce choix dans ce topic) mais un écran Nextion couplé à un Wemos qui discute avec Jeedom en ESPeasy.
Un beau design ne met sert pas à grand chose au final. Je gère ma domotique à la voix et via l’écran principalement.
Le but est de rendre accessible, sans avoir besoin de smartphone, les fonctions simplement.
Je ce connaissais pas ce système, ça à l’air sympa ! Par contre pour la programmation de la carte, tu passe par jeedom ou tu dois écrire ça « à la main » ? si à la main, en quel language ? Je dois bien avouer que le dev me fait horriblement chier j’essaye le plus possible d’éviter ça ![]()
C’est l’étape 2 de mon plan Z, gérer tout à la voix. Je suis entrain de me renseigner sur les comparatifs Alexa / GHome en ce moment.
Du coup effectivement le design ( qui semble beaucoup de temps ) n’est pas la priorité, mais c’est vrai que certains design que les gens partagent que je vois passer sont franchement cool, et je pense que ça plairait aussi à madame cette histoire ( pour le moment, elle trouve la domotique pas du tout intuitif, malgré le fait que je fais tout pour lui simplifier la chose, du coup ça me frustre ^^ )
Hello,
Au niveau de la carte Wemos (ou tout autre carte permettant d’avoir une firmware en ESPeasy), il suffit (en gros) d’indiquer une adresse où publier les données à envoyer.
Sur l’écran Nextion, tu as un éditeur. Tu peux par exemple rajouter des boutons. A chaque fois que tu presses le bouton, un code est envoyé à Jeedom.
Il te suffit alors de faire un scénario avec comme déclencheur la réception d’un code.
Dans ce scénario, si le code reçu est xx alors je fais cela comme action.
L’une des seule partie avec du code est pour ma part la gestion de pièces multiples au niveau de l’aspirateur. Mais cela reste très simple (je ne suis pas dév… mais alors pas du tout).
Sinon, à part des if et else…
Pour ma part, j’utilise Alexa avec ces plugins :
- Homebridge (de @nebz) : il me permet d’avoir les objets et scénarios que je souhaites commander depuis Alexa (« Alexa, ferme les volets » est une phrase déclencheur qui fait appelle à une routine Alexa… qui lance mon scénario Jeedom). Pas besoin d’avoir d’iPhone. Il faut par contre activer la skill homebridge-alexa sur amazon.
- Alexa - API (de @sigalou) : qui me permet de faire parler Alexa. Pour reprendre l’exemple de la fermeture de volets, après la fermeture, je fais un test pour savoir si tous les volets ont bien été fermés. Si c’est le cas (ou pas), Alexa me le signale.
Que ce soit madame ou les enfants (moins de 10 ans), ils n’ont aucun problème à utiliser la domotique, que ce soit à la voix ou via mon écran.
Salut
If et else, effectivement ça se gère mais au dela … Ok quand j’en arriverais la, je me senseignerais à ce sujet, ça à l’air vraiment cool.
Il me semblait que homebridge était utilisé surtout pour commander jeedom via siri / apple. Je ne savais pas qu’il s’appliquait aussi à Alexa dans le sens Jeedom → alexa, bon à savoir.
La encore, je pensais que c’était dans l’autre sens : alexa → jeedom, c’est visiblement l’inverse ![]()
J’avais cru comprendre que les skills Alexa était le gros avantage par rapport à google, qui semble assez fermé, moyennant visiblement plus de simplicité. Pas simple tout ça !
la simplicité pour les uns se traduit par la complexité pour les autres ![]()
@Kyoshi j’ai fais le test à l’instant, je te confirmes que le robot en mode serpillère se fout completement d’tre sur un tapis ou pas.
A l’occasion je retenterais en enlevant les caches que j’avais mis devant les capteurs pour qu’il ne prenne pas mon tapis noir pour le vide d’un escalier, mais en attendant du coup je vais bien devoir gérer 2 maps : une pour l’aspi et une pour la serpillère.
Ou enlevé les caches quand tu met en serpillère. Vu qu’il prend ton tapis pour un vide il ira pas dessus 