Tout d’abord, grand merci à toi.
De base, avec un PIR, tout le monde modifie son comportement car il faut bouger pour avoir la lumière pendant une période donnée ![]()
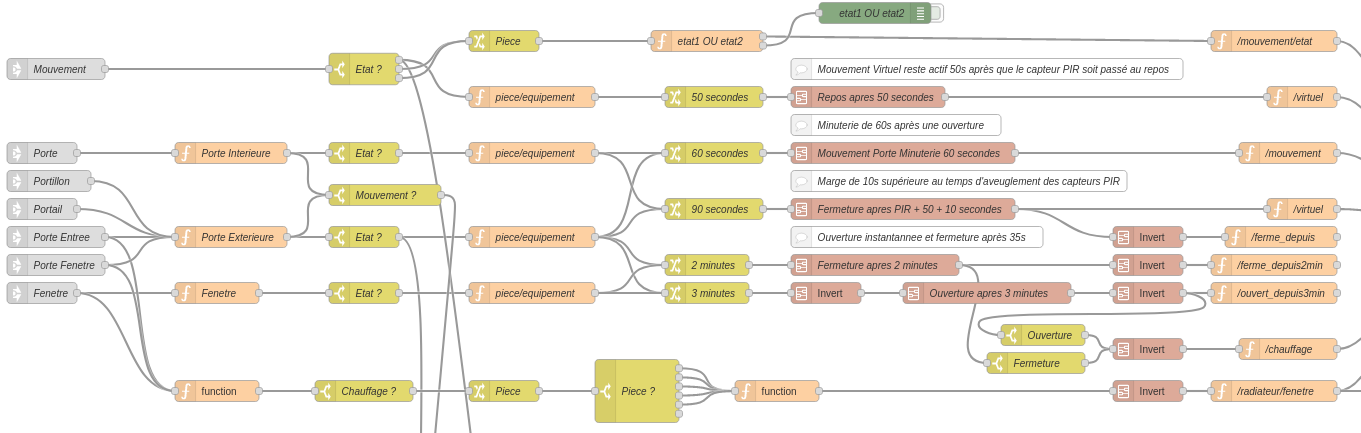
Perso, j’ai juste rajouté le fait que le système domotique cherche tout seul comme un grand à déterminer s’il peut confirmer ou pas la présence dans chaque pièce:
- si la présence est confirmée, alors la lumière ne séteindra plus (et ne s’allumera plus)
- si la présence n’est pas confirmée, alors il faut bouger régulièrement comme avec un PIR classique ou aller allumer la lumière sur l’inter
Ce n’est tout de même pas compliqué ça !
Concernant la fiablitié, ne n’est pas parce que la gestion des délais est pénible (à cause du temps d’aveuglement des PIR) que ce n’est pas fiable. Sur ce point, je dois dire que malheureusement les scénarios Jeedom, eux n’étaient pas fiables car ils ne s’éxécutaient pas à tous les coups. La partie scénario dans Jeedom ne suivait pas la cadence. J’ai changé 3 fois de machine et c’était toujours pareil. J’ai fini par tout transférer cette gestion en masse de delais sous Node-RED. (Et aussi, je n’aime pas le « cron »)
Qu’il y ait 2 ou 20 pièces à traiter, ça ne change pas grand chose !
Le seul véritable problème, c’est la gestion des piles.
Dans le principe, tu avais fait la même chose que moi en plus précis avec 3 PIRs par pièce. Alors que moi, j’utilise le PIR de la pièce concernée et le détecteur de porte s’il y a une porte et le PIR de la pièce voisine lorsque la porte est ouverte ou si pas de porte.
Dans tous les cas, le principe est bien celui que tu décris
Pour résumer,
- tu avais utilisé 3 PIR par pièce
- j’utilise 1 PIR par pièce et le détecteur de porte entre les pièces si une porte existe (mais je rappelle que la porte n’a pas besoin d’être fermée pour que ça fonctionne)
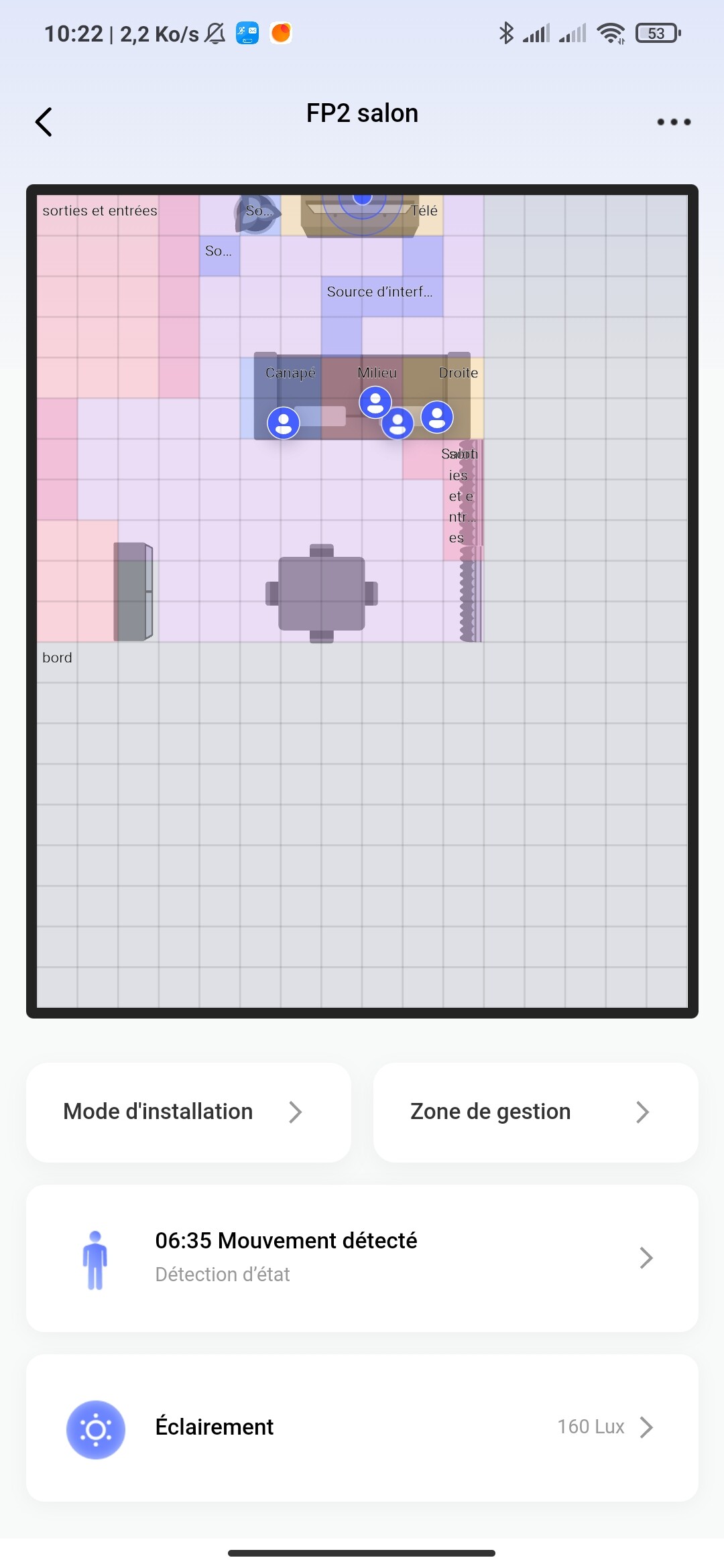
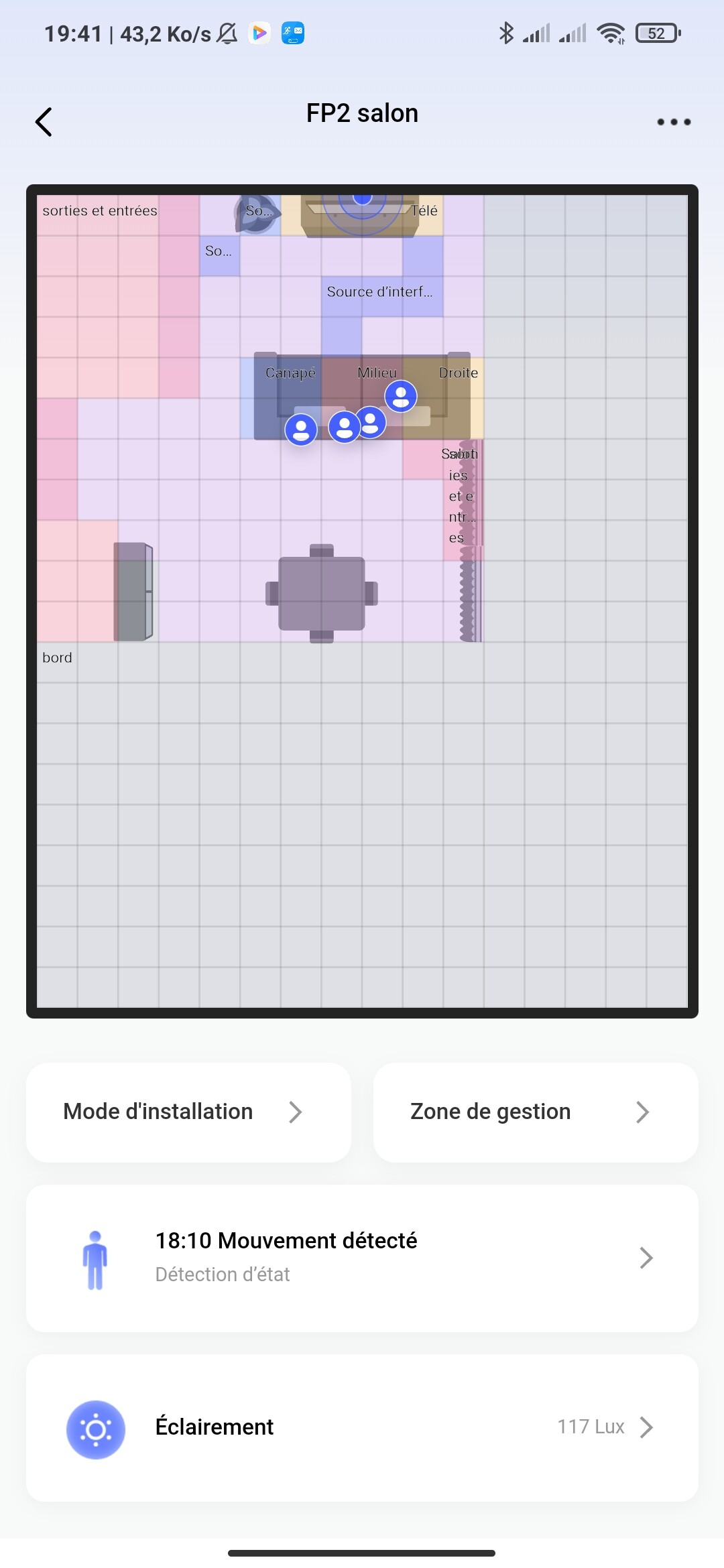
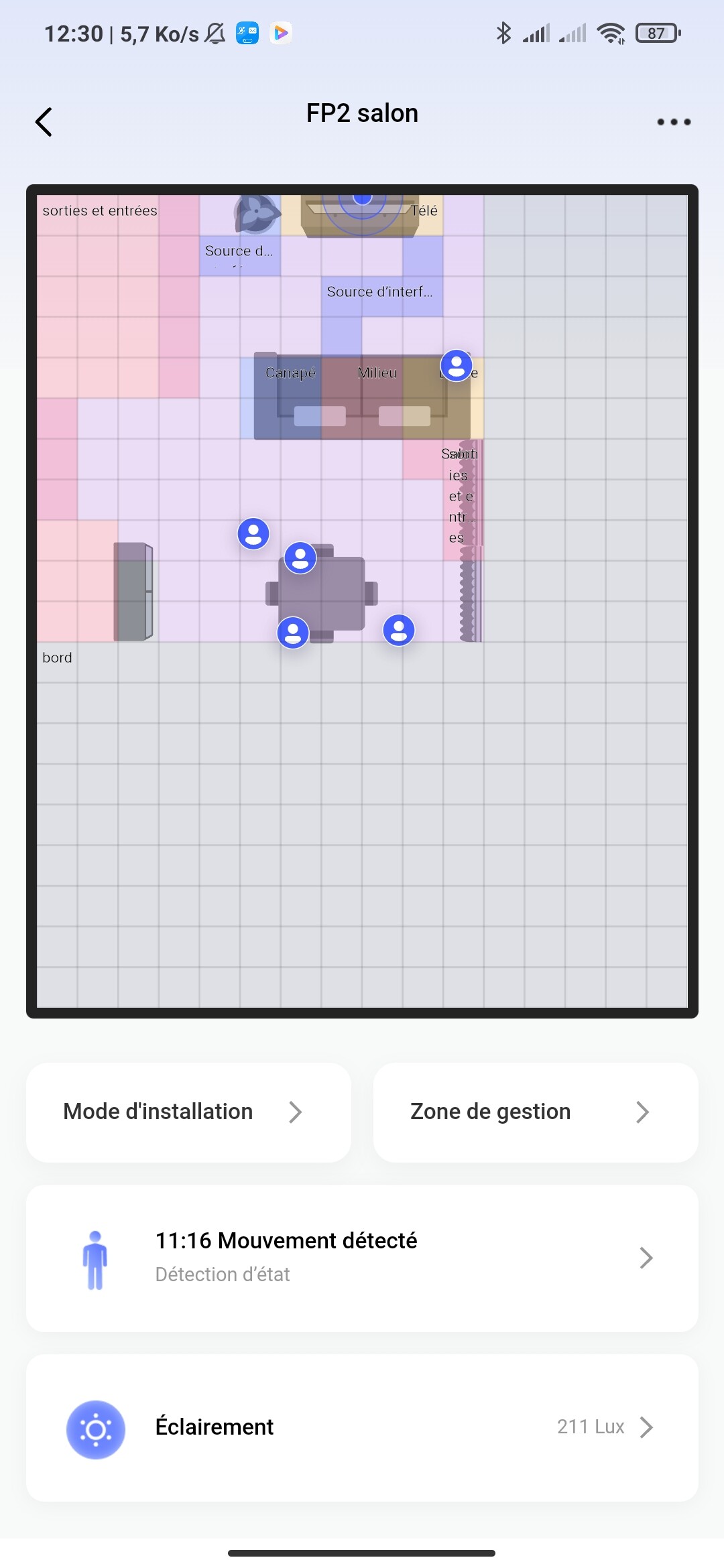
- le module Aquara fait la même chose mais de façon ultra précise en découpant la surface considérée, disons en une centaine de petits carrés. Tant que le module n’a pas vu de mouvement dans les carrés périphériques, la ou les personnes ne sont pas sorties, donc il y a présence même si pas de mouvement.
Au final, dans tous les cas, il reste l’inconvénient suivant : si une personne est immobile dans une pièce (mais considérée présente par le module ou le système domotique) et qu’une autre personne rentre puis ressort de cette pièce, alors la personne restée immobile ne sera plus considérée comme présente.
Mais pour le module Aquara, ils devraient pouvoir gérer ça tant que 2 personnes ne pas vues comme « collées » ou dans le même petit carré ou dans 2 petits carrés adjacents.
C’est clair, mais les modèles sont peu nombreux tout de même… J’aimerais bien avoir d’autres ref en plus du Aquara… Et il faudra que je finisse la lecture de tes posts sur le Aquara…
Il faut que tu crées un sujet à part avec toutes tes automatisations voire un sujet par automatisation tellement tu as de trucs à raconter et mettes des liens ici ![]()