Bonjour
J’ai acquis le plugin Xiaomi pour Jeedom pensant pouvoir intégrer mon nouvel aspirateur Dreame D9, mais hélas il n’apparait pas dans la liste.
Il n’y a que 3 modèles d’aspirateurs, que j’ai tous testés en vain.
Mon IP est bonne et j’ai bien réussi à récupérer le token via l’application MiHome 5.4.49.
Quelqu’un aurait-il réussi à intégrer cette appliance sous Jeedom ?
Faut-il attendre une mise à jour du plugin ?
Je me permets de remonter le poste pour savoir si le robot dreame vacuum d9 est désormais pilotable via le plugin Xiaomi home avant de l’acheter. Je n’ai eu aucun problèmeème d’intégration homebridge mais je souhaiterai pouvoir le piloter via Jeedom. Si @lunarok passe par ici
C’est un robot gérer par l’appli Xiaomi Home y’a pas de raison que ce soit pas compatible
Bonjour
J’avais regardé cette alternative, mais j’ai buté sur le nom du device.
Qu’as-tu renseigné pour y parvenir ?
« sudo miiocli xxxxx … »
J’ai un Dreame D9
Merci
PS: l’IP et le token s’écrivent bien AVEC les crochets [ ] ?
Bonjour @dan_73 ,
Non, c’est sans les crochets. J’ai pas mon PC perso devant moi. Il faut je regarde ce que j’ai mis dans l’historique des commandes en ssh. C’est pas le nom de l’appareil mais le type, tu peux avoir la liste en tapant miiocli --help
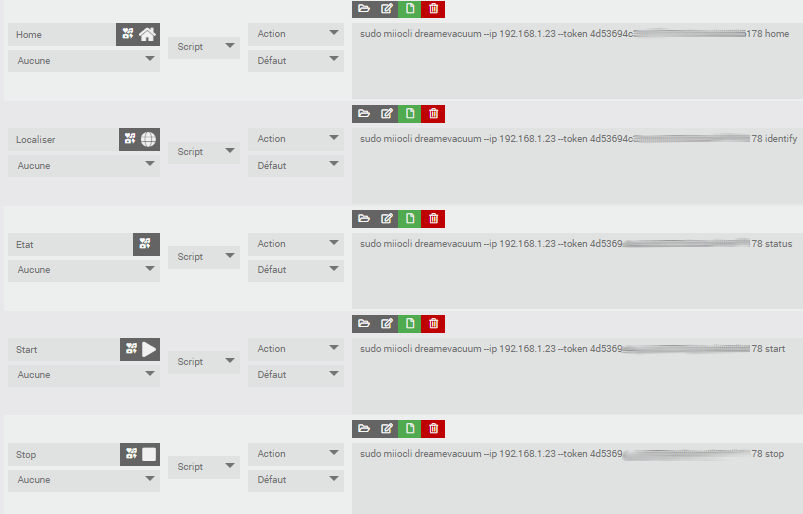
De souvenir c’est dreamevacuum donc la commande complète pour l’obtention de la listes des commandes action & info cela devrait être :
Bon je viens d’essayer, mais je bloque
J’ai une erreur après la saisie de la commande --help
freebox@Jeedom-V2:~$ miiocli --help
Traceback (most recent call last):
File "/usr/local/bin/miiocli", line 5, in <module>
from miio.cli import create_cli
File "/usr/local/lib/python3.7/dist-packages/miio/cli.py", line 43, in <module>
cli.add_command(device_class.get_device_group())
File "/usr/local/lib/python3.7/dist-packages/miio/integrations/vacuum/roborock/vacuum.py", line 932, in get_device_group
@dg.resultcallback()
AttributeError: 'DeviceGroup' object has no attribute 'resultcallback'
Malheureusement je n’ai aucune compétence sur cet OS et impossible de voir ce qui bloque.
C’est une VM Freebox :
Linux Jeedom-V2 4.19.0-22-arm64 #1 SMP Debian 4.19.260-1 (2022-09-29) aarch64 GNU/Linux [10.13]
Si jamais ça parle à l’un d’entre vous
Tu as tapé : miiocli --help avec cet commande cela te renvoi les type d’appareils compatible
Exemple chez moi :
root@VM-JEEDOM:/home/gauthier# miiocli --help
Usage: miiocli [OPTIONS] COMMAND [ARGS]...
Options:
-d, --debug
-o, --output [default|json|json_pretty]
--version Show the version and exit.
--help Show this message and exit.
Commands:
airconditionermiot
airconditioningcompanion
airconditioningcompanionmcn02
airconditioningcompanionv3
airdehumidifier
airdogx3
airfresh
airfresha1
airfresht2017
airhumidifier
airhumidifierjsq
airhumidifierjsqs
airhumidifiermiot
airhumidifiermjjsq
airpurifier
airpurifiermiot
airqualitymonitor
airqualitymonitorcgdn1
alarmclock
aqaracamera
ceil
chuangmicamera
chuangmiir
chuangmiplug
cloud Cloud commands.
cooker
curtainmiot
device
discover Discover devices using both handshake...
dreamevacuum
fan
fan1c
fanleshow
fanmiot
fanp5
fanza5
g1vacuum
gateway
heater
heatermiot
huizuo
huizuolampfan
huizuolampheater
huizuolampscene
miotdevice
petwaterdispenser
philipsbulb
philipseyecare
philipsmoonlight
philipsrwread
philipswhitebulb
powerstrip
pwznrelay
roborockvacuum
roidmivacuummiot
scisharecoffee
toiletlid
viomivacuum
walkingpad
waterpurifier
waterpurifieryunmi
wifirepeater
wifispeaker
yeelight
yeelightdualcontrolmodule
Si tu mets la commande que je t’ai dis plus haut :
root@VM-JEEDOM:/home/gauthier# sudo miiocli dreamevacuum --ip 1xx.xxx.xxx --token xxxxx --help
Usage: miiocli dreamevacuum [OPTIONS] COMMAND [ARGS]...
Options:
--ip TEXT [required]
--token TEXT [required]
--model TEXT
--help Show this message and exit.
Commands:
call_action Call an action by a name in the mapping.
call_action_by Call an action.
fan_speed Return fan speed.
fan_speed_presets Return available fan speed presets.
forward Move forward.
get_property_by Get a single property (siid/piid).
home Return to home.
identify Locate the device (i am here).
info Get (and cache) miIO protocol information from...
play_sound Play sound.
raw_command Send a raw command to the device.
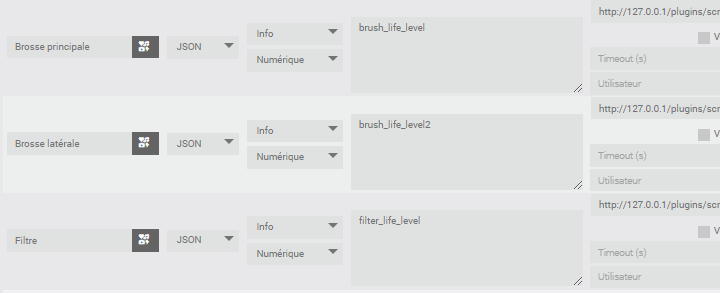
reset_filter_life Reset filter life.
reset_mainbrush_life Reset main brush life.
reset_sidebrush_life Reset side brush life.
rotate Rotate vacuum.
set_fan_speed Set fan speed.
set_fan_speed_preset Set fan speed preset speed.
set_property_by Set a single property (siid/piid) to given value.
set_voice Upload voice package.
set_waterflow Set water flow.
start Start cleaning.
status State of the vacuum.
stop Stop cleaning.
test_properties Helper to test device properties.
waterflow Get water flow setting.
waterflow_presets Return dictionary containing supported water flow.
Non j’ai très bien effectué ma saisie. Mais que ce soit avec sudo ou non c’est pareil.
La seule commande miiocli --help ou sudo miiocli dreamevaccuum … me retourne toujours la même erreur se terminant par « AttributeError: ‹ DeviceGroup › object has no attribute 'resultcallback’ »
J’ai pourtant suivi le TUTO à la lettre
J’ai fait des recherches avec cette erreur et je ne semble pas etre le seul : https://community.jeedom.com/t/air-purifier-3h/37012/99?page=5
ou encore : https://community.jeedom.com/t/air-purifier-3h/37012/115?page=6
Ou peut être lié aux différentes versions précédemment installées, ou à la version même de l’OS.
En tout cas ça me permet d’avancer sur l’intégration.
Merci pour tes retours.
Bon finalement ça ne marche pas trop mal.
Il y a un peu de boulot, mais on a rien sans rien
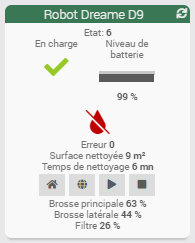
Quand tu remettras le tien en service, tu pourras me dire si tu trouves ce à quoi correspondent « charging_state »: 1, et « device_status »: 2
Je pensais que « charging_state » retournait 1 si en charge et 0 si débranché, mais chez moi ça ne bouge pas. C’est peut-être davantage En ligne ou pas ?
Le robot est actuellement hors de sa base et ça affiche « En charge », donc je doute que ce soit lié à la batterie.
Quant à l’état 2 ?? aucune idée. Peut-être à voir à l’usage.
Edit : Etat 6 c’est lorsque ça charge. Etat 2 lorsque c’est chargé.
Par contre « charging_state » ne bouge jamais si je le mets hors réseau le script génère une erreur, mais l’état ne bouge pas)
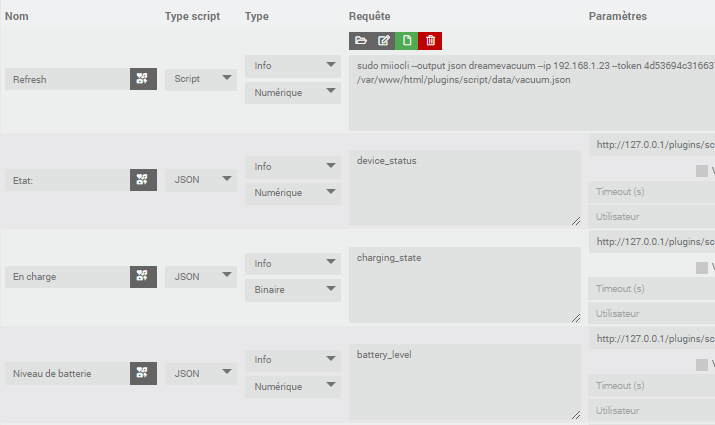
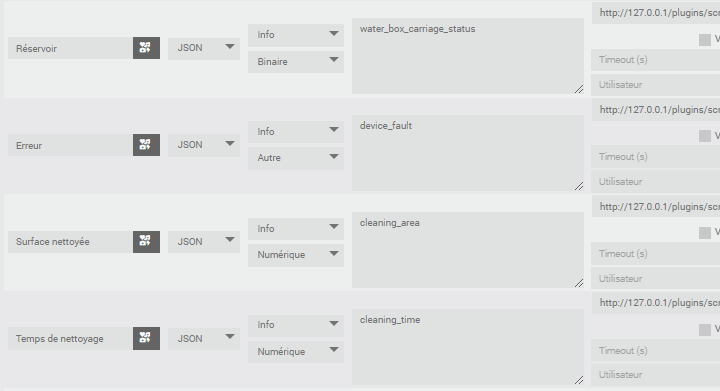
Tu me partager ta partie script (commande/action) car de mémoire je n’avais pas autant d’info sur le widget… après j’ai fait ça en 1h pour vérifier la compatibilité. je vais mettre ça au propre quand le père noël sera passé