Pour faire suite des aventures du weekend
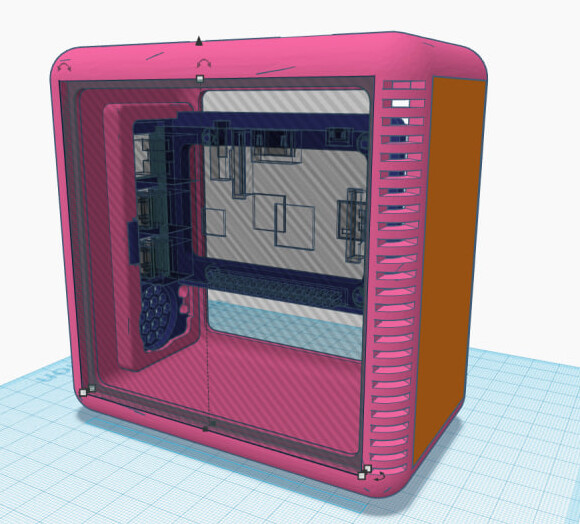
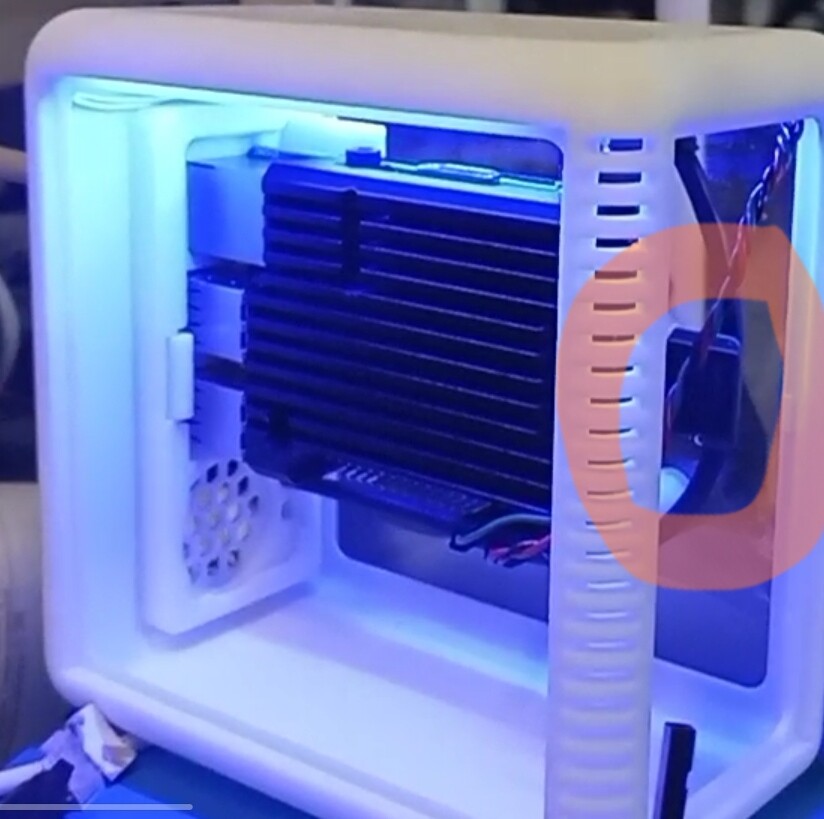
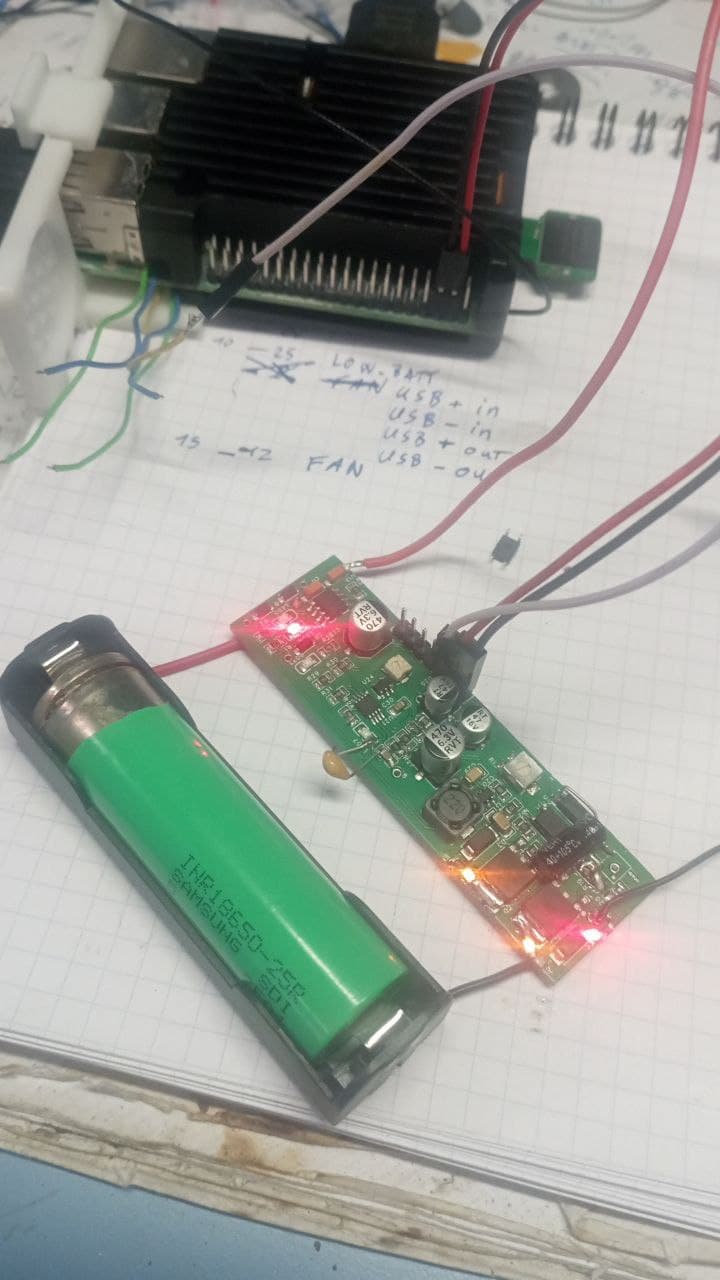
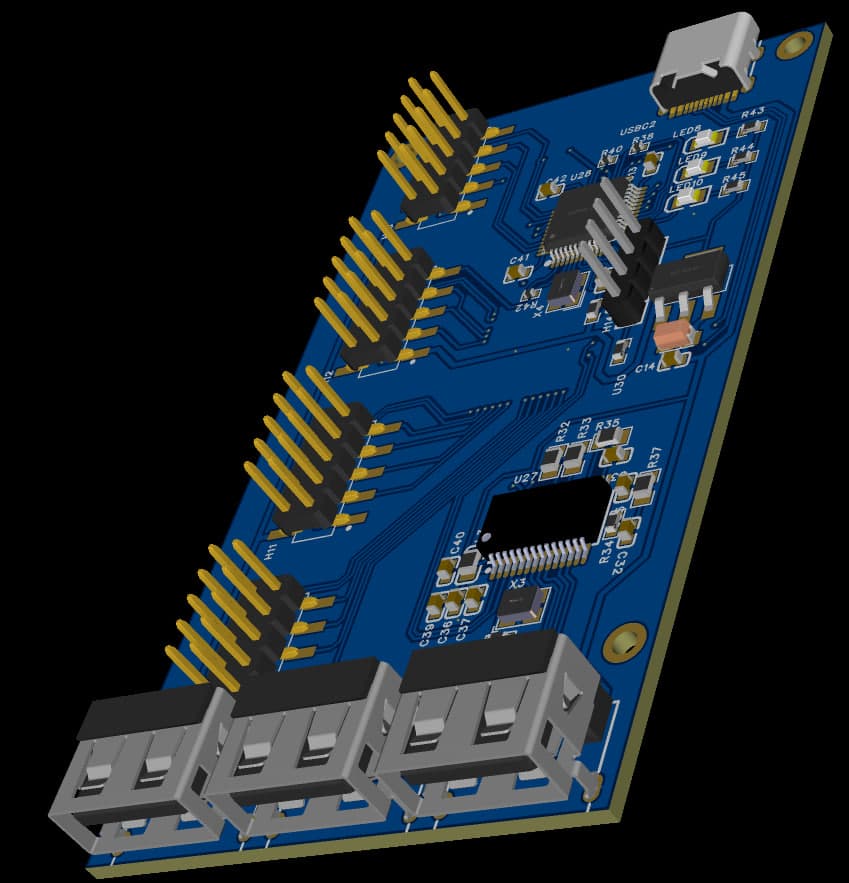
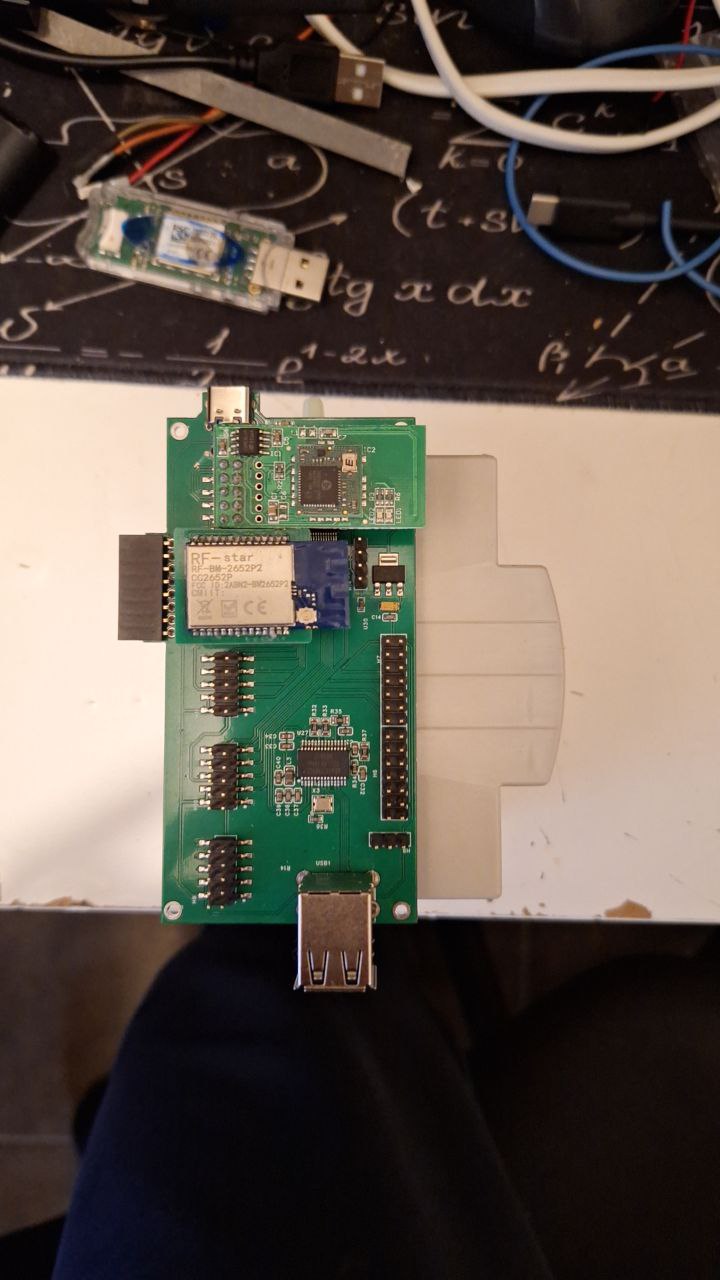
J’avais déjà fais des tests et créé un premier prototype
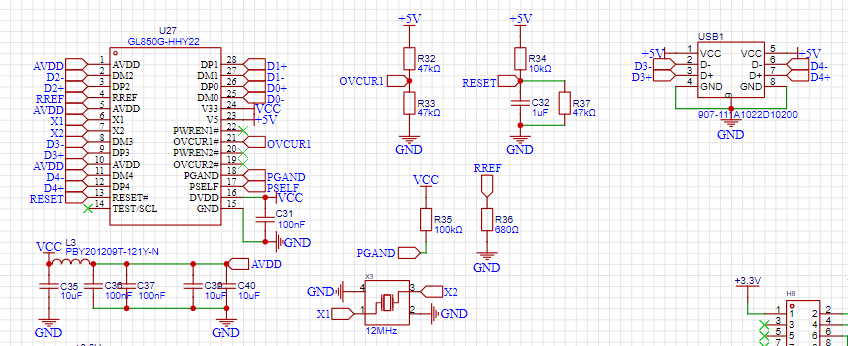
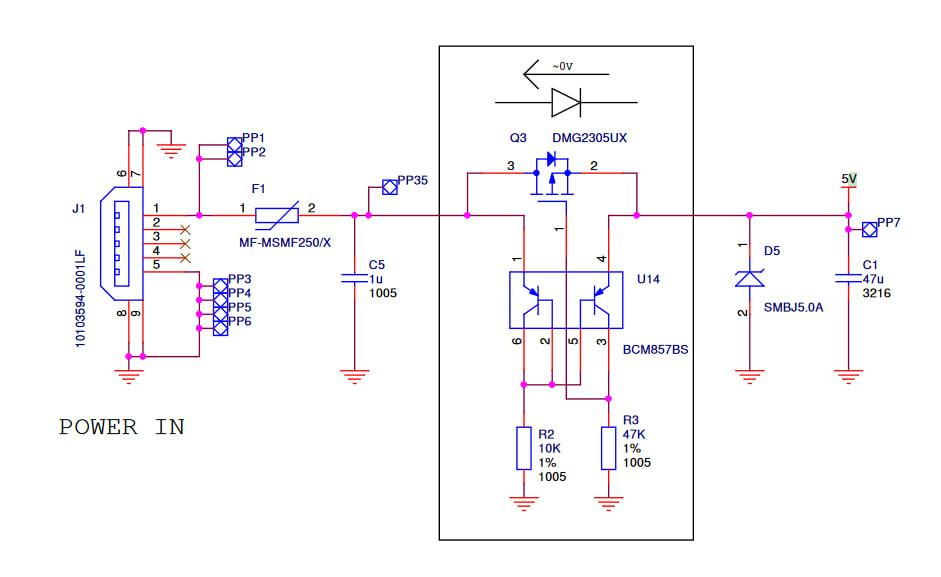
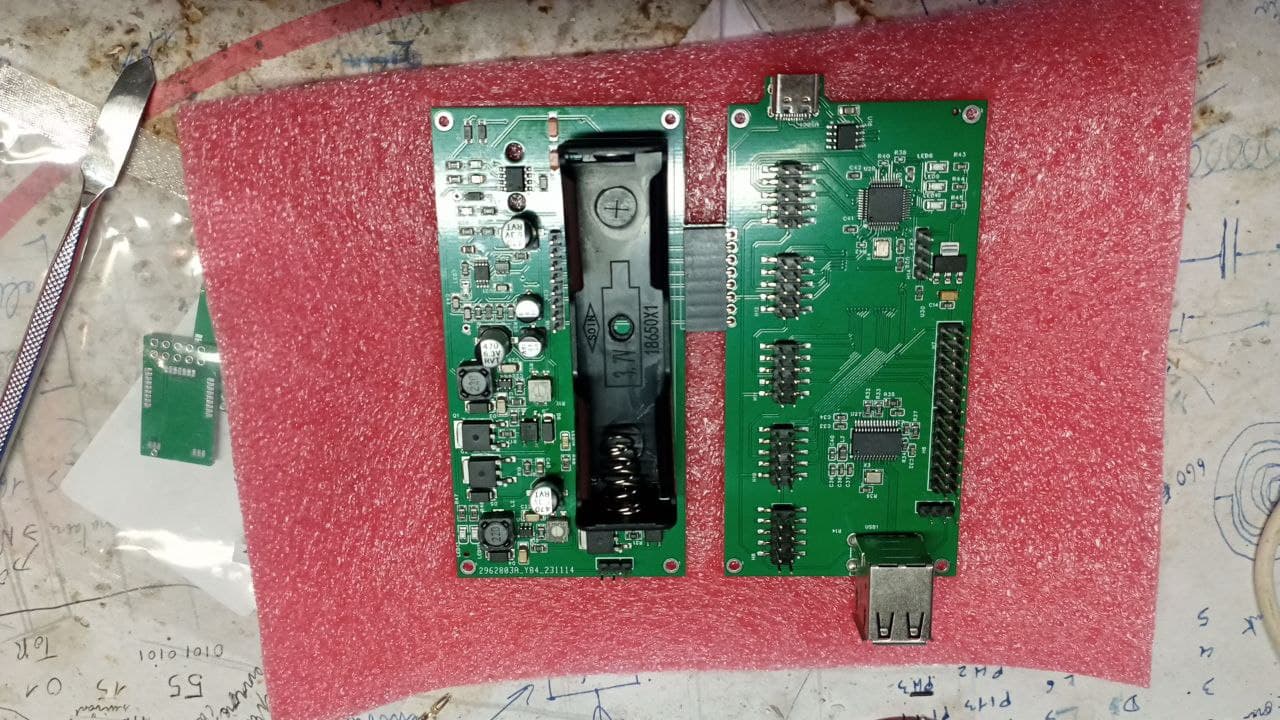
réviser des routage et changé des valeurs de composants
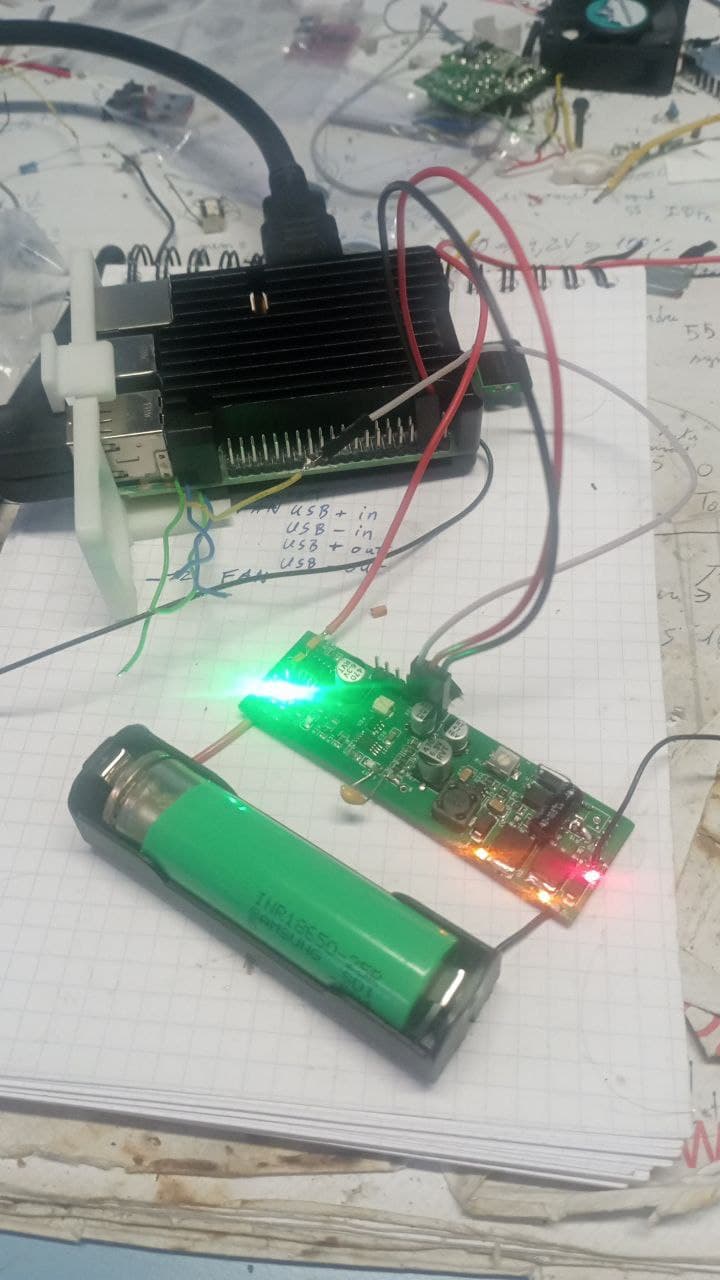
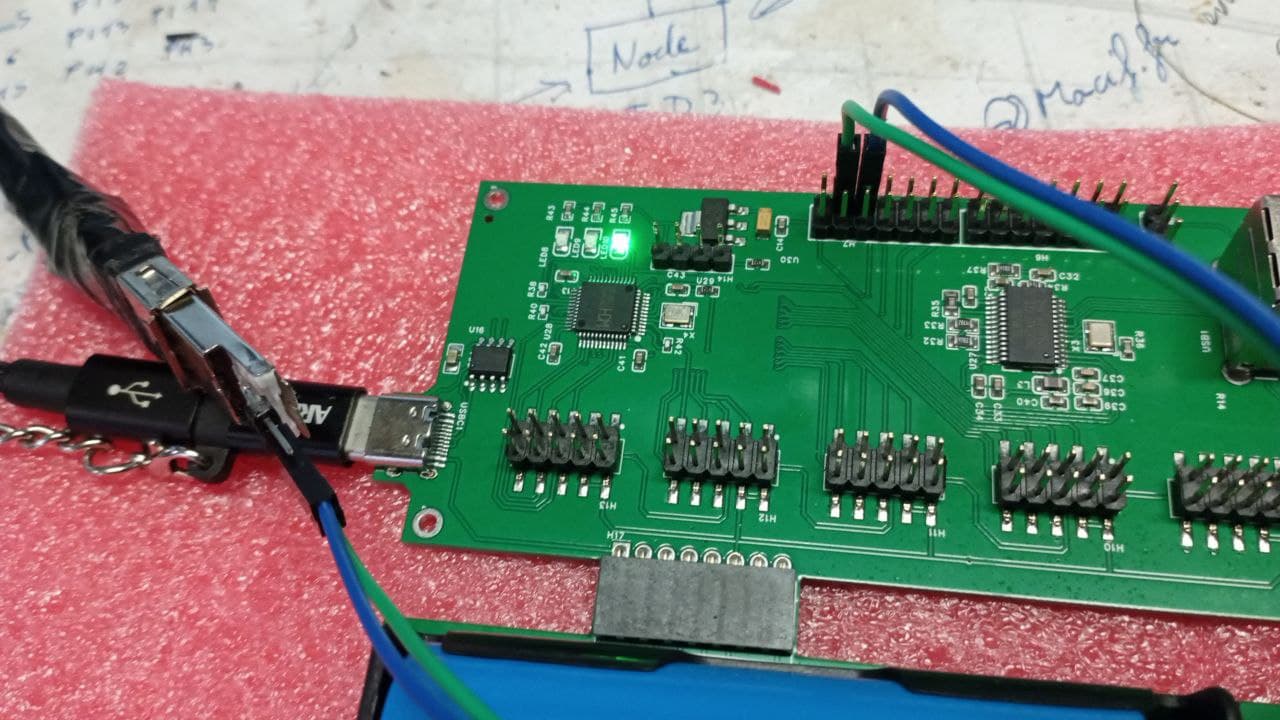
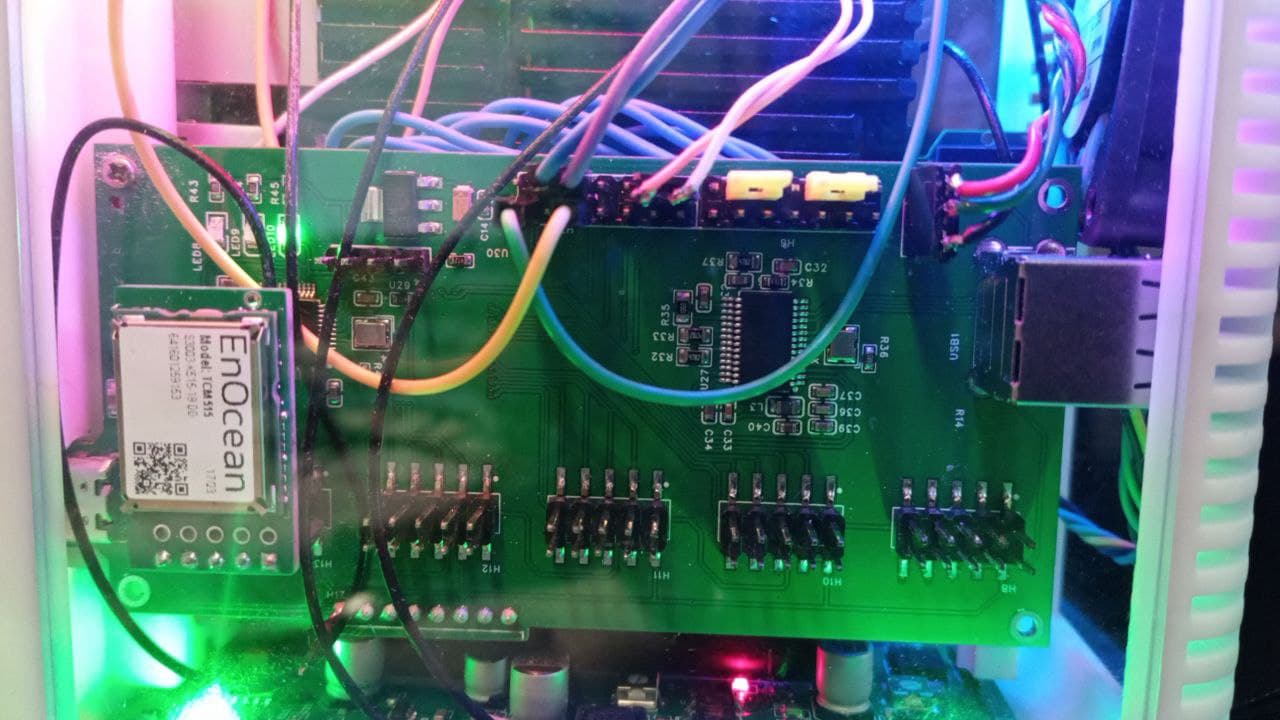
sur cette photo la batterie est en charge
et là chargé
Bon premier problème le system m’affiche toujours « low power »
mince mais normal
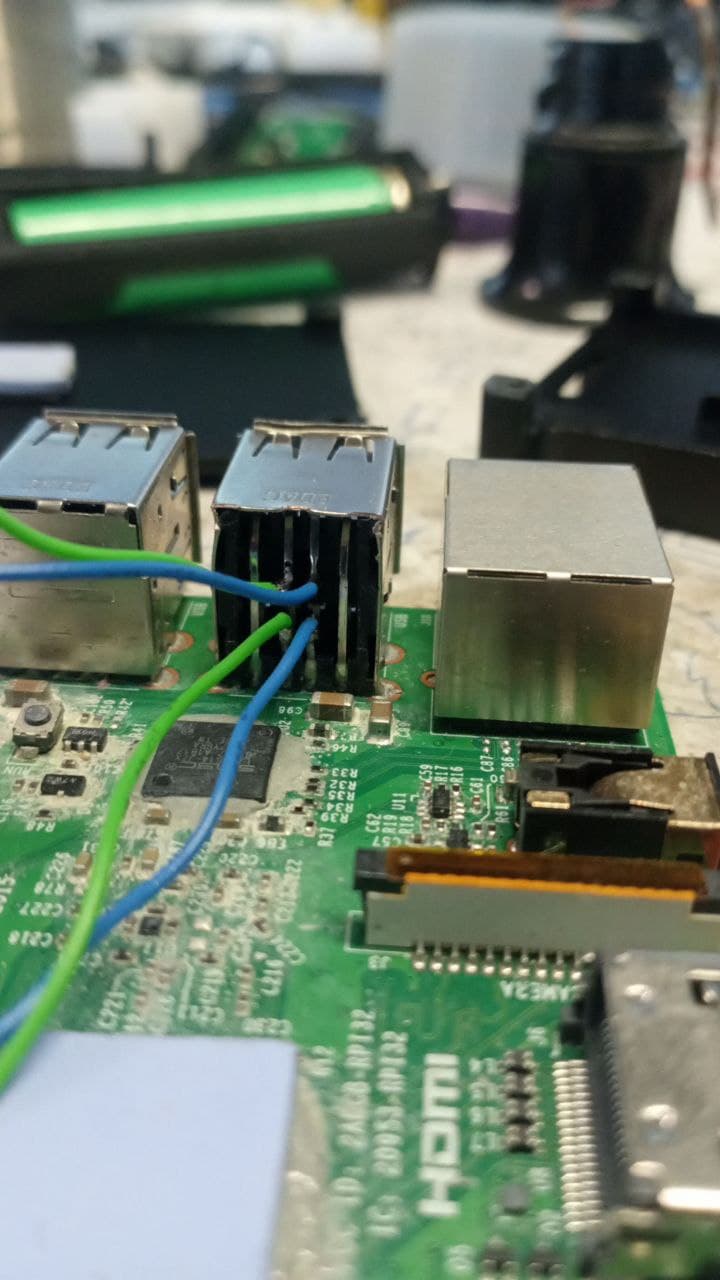
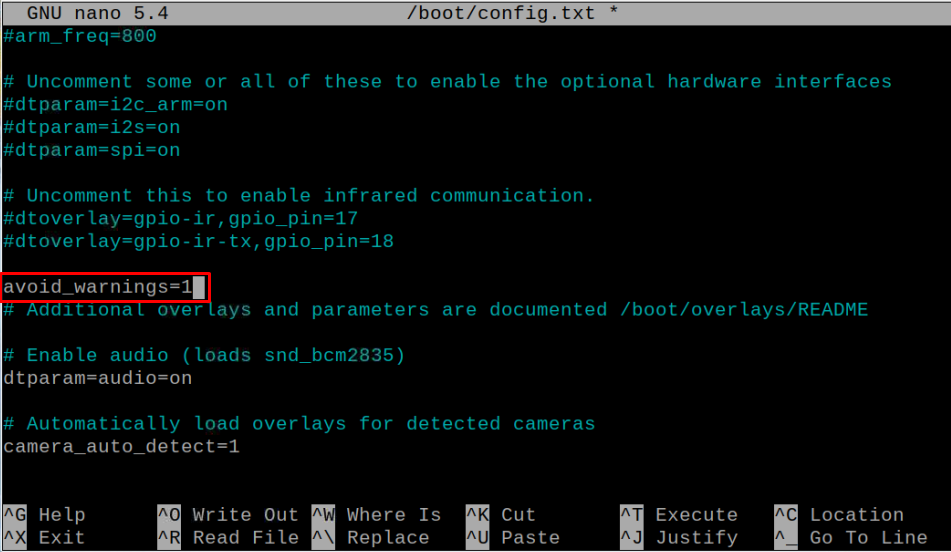
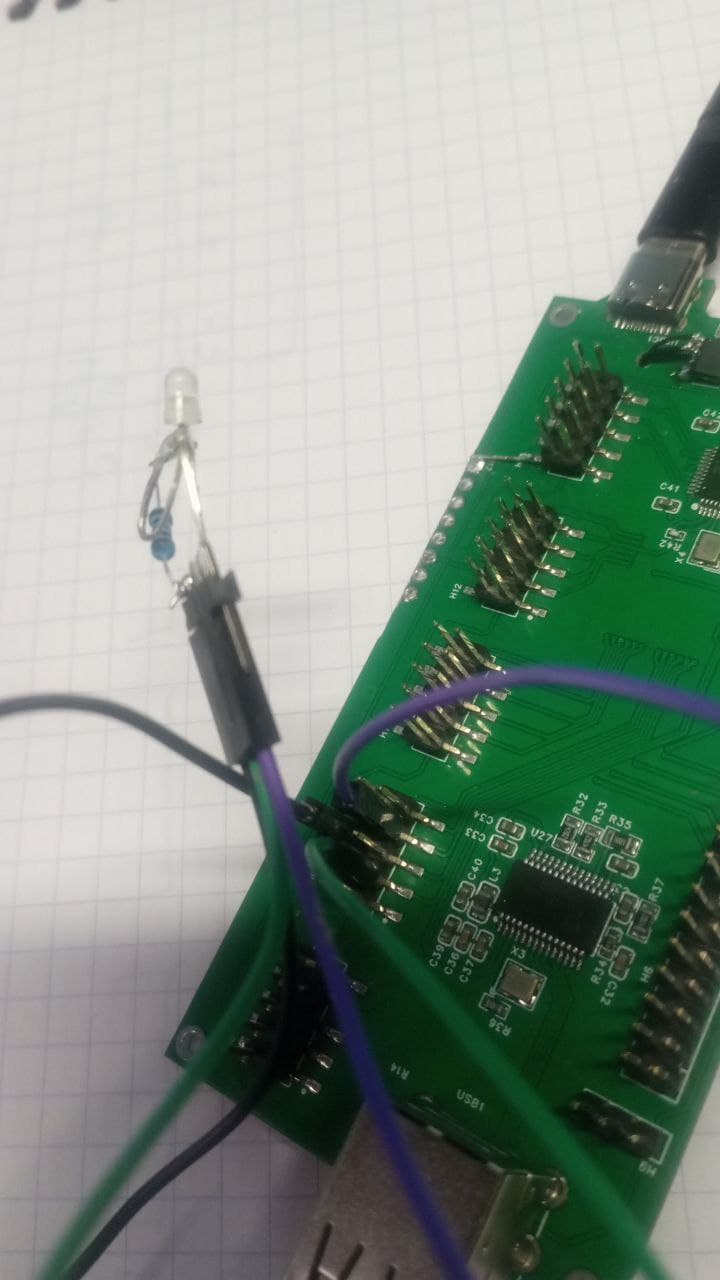
comme j’alimente le RPI par les port gpio PP35 n’a pas de tension donc il faut désactiver cette info
$ sudo nano /boot/config.txt
et ajouter
avoid_warnings=1
puis $ sudo apt remove lxplug-ptbatt
pour désinstaller le plugin de scrutation d’énergie
question combien de temps ça tient
en plus mon rpi est gourmand 600mA de moyenne
la batterie lithium ( récup d’une batterie de pc portable) est à 4.2V chargé à bloque
on débranche brutalement
au bon de 17min la batterie est à 3.746V
Super on tient bien
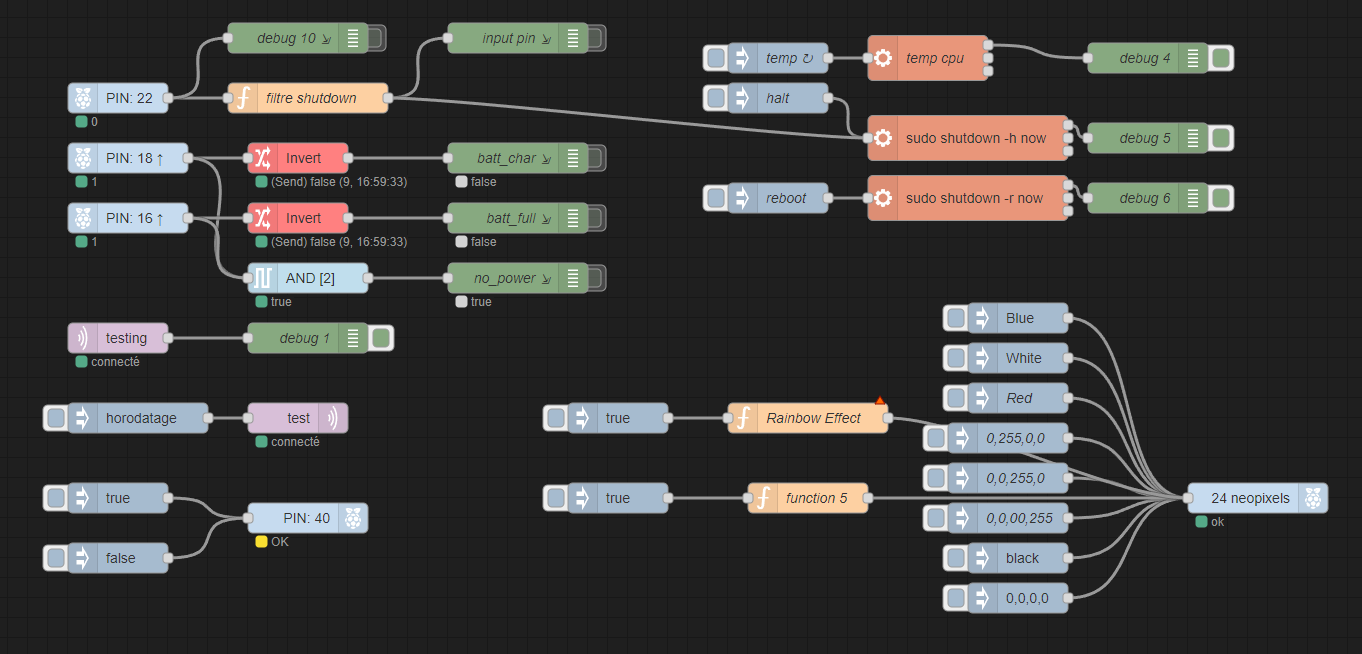
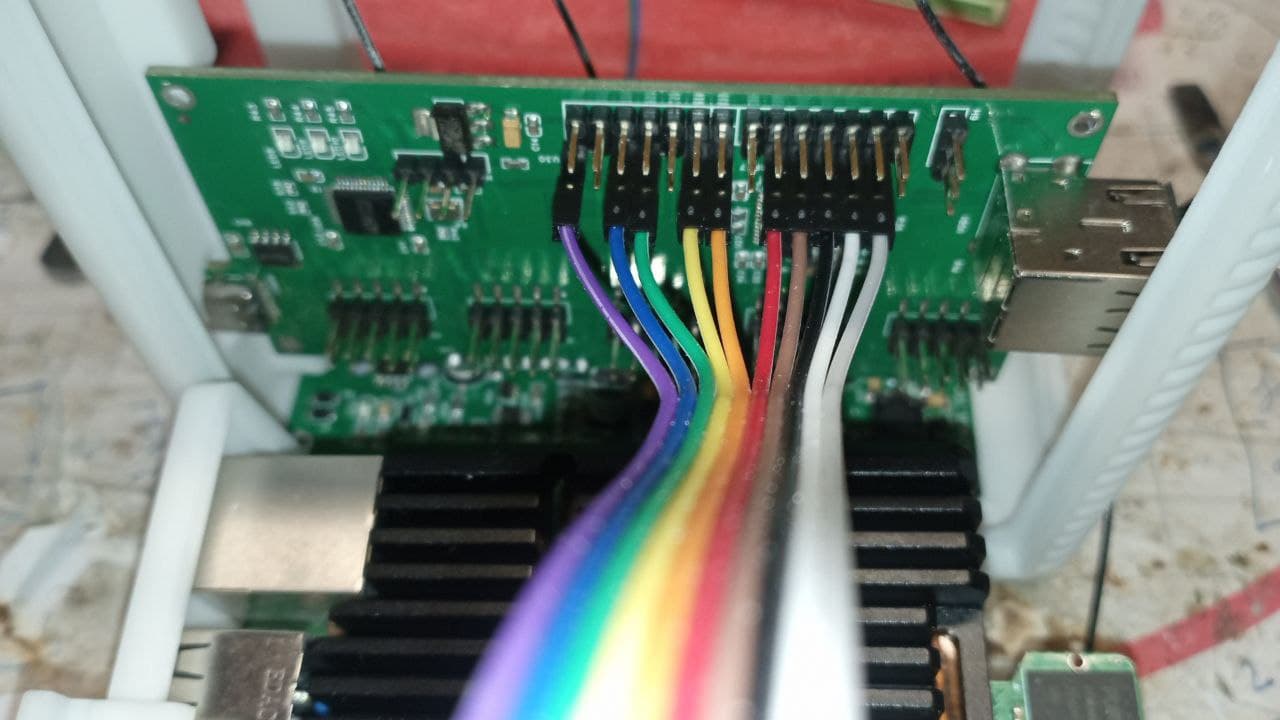
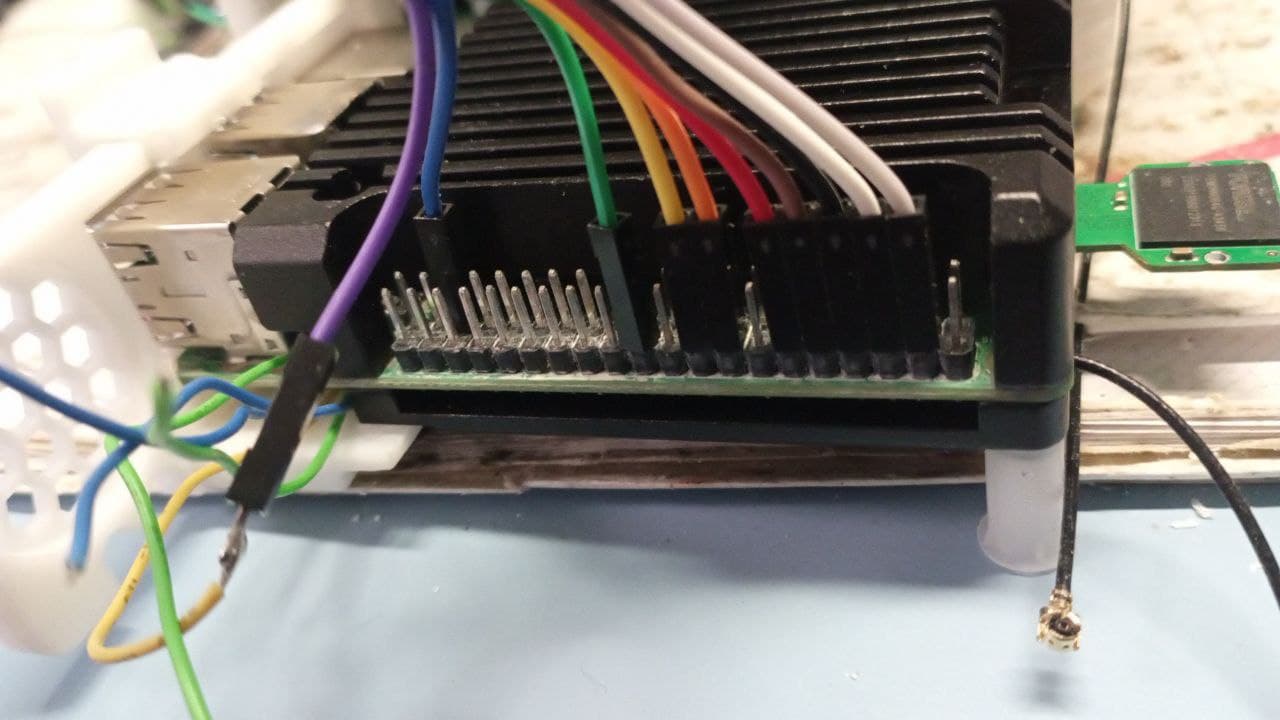
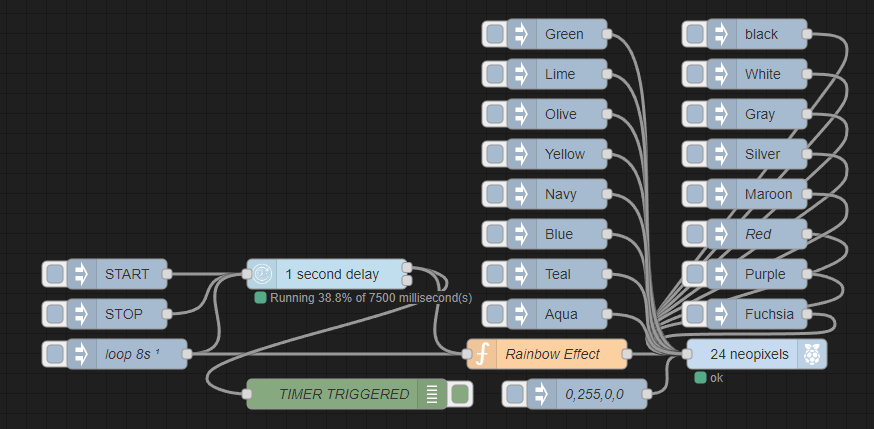
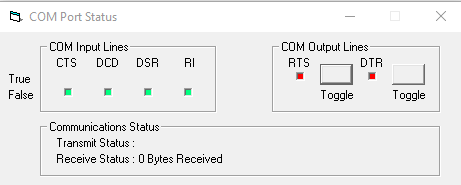
avec node red on test les gpio pour gérer le pi avec le power back up, en gros on ne lui fout pas la paix en même temps
Je vous passerais on flow complet par la suite
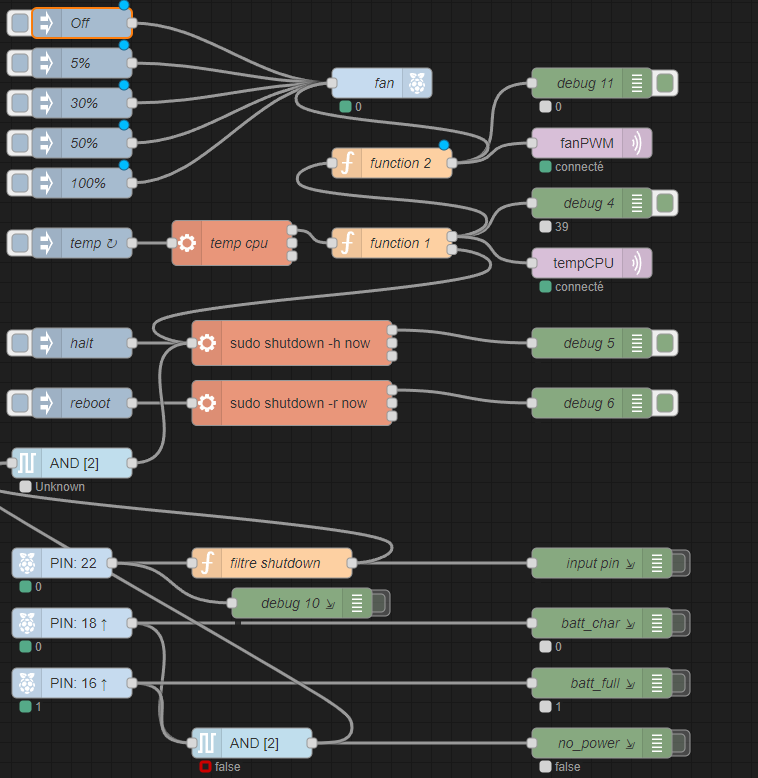
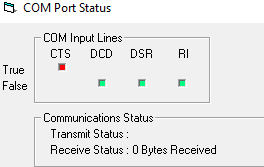
Ah ça y est la carte à envoyé un NL1 sur la pin 22 du raspberry, ce qui veut dire que la tension de l’élément est inférieur à 3.4V et donc peut mettre en défaillance le système
Nodered voit cette info et pilote proprement un « shutdow -now »
impeccable le system s’éteind proprement au bout de 37min
Je trouve ça pas mal du tout
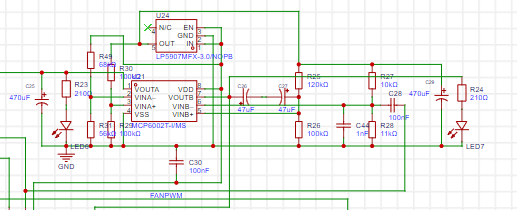
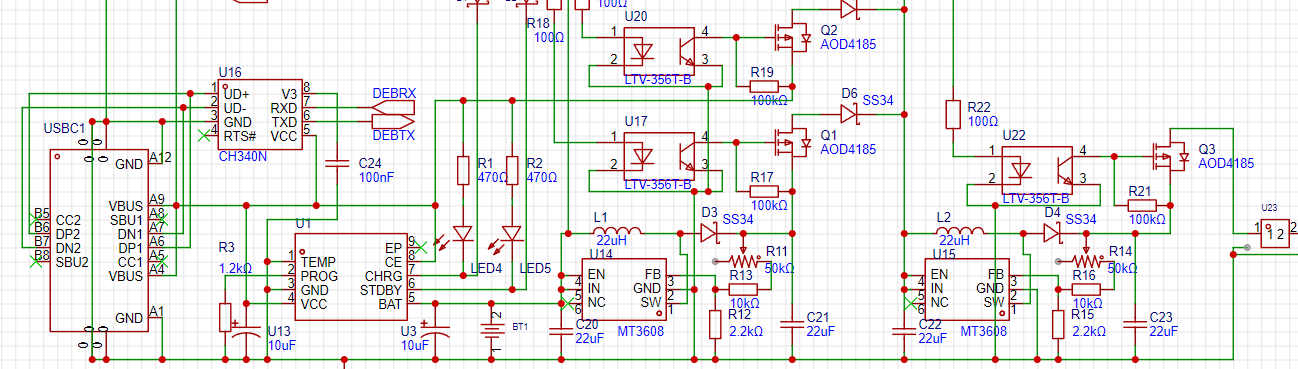
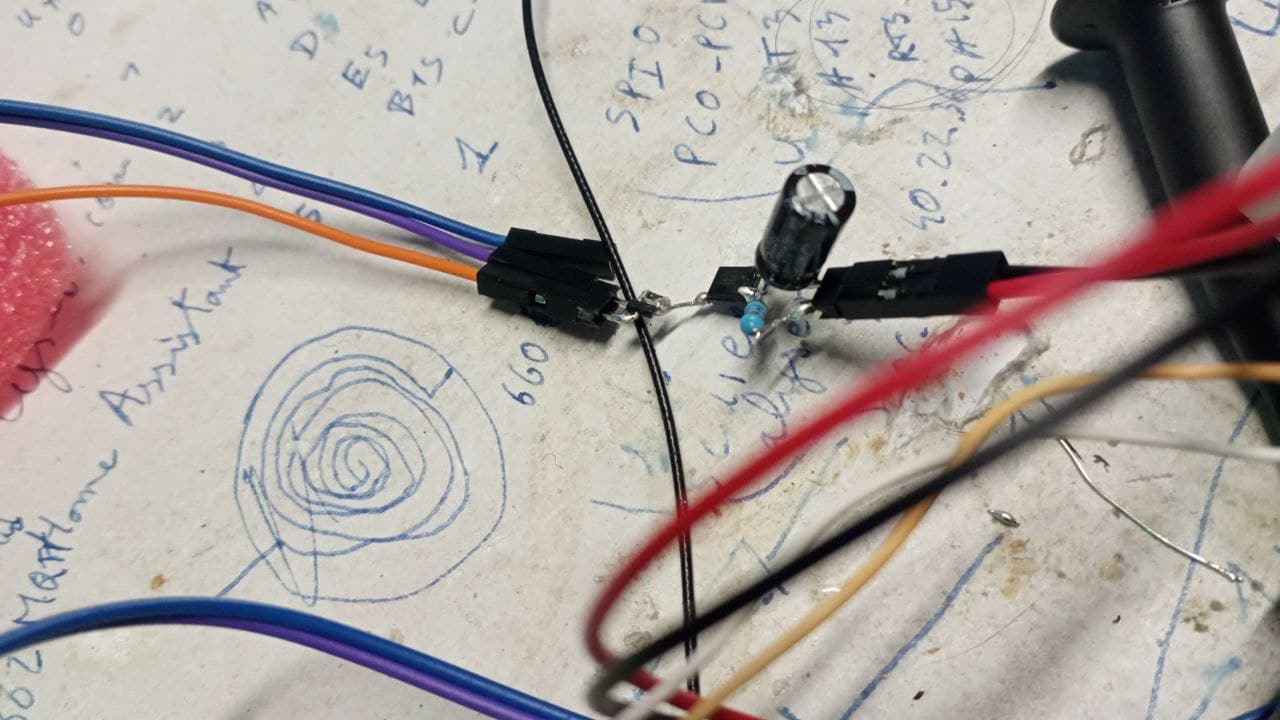
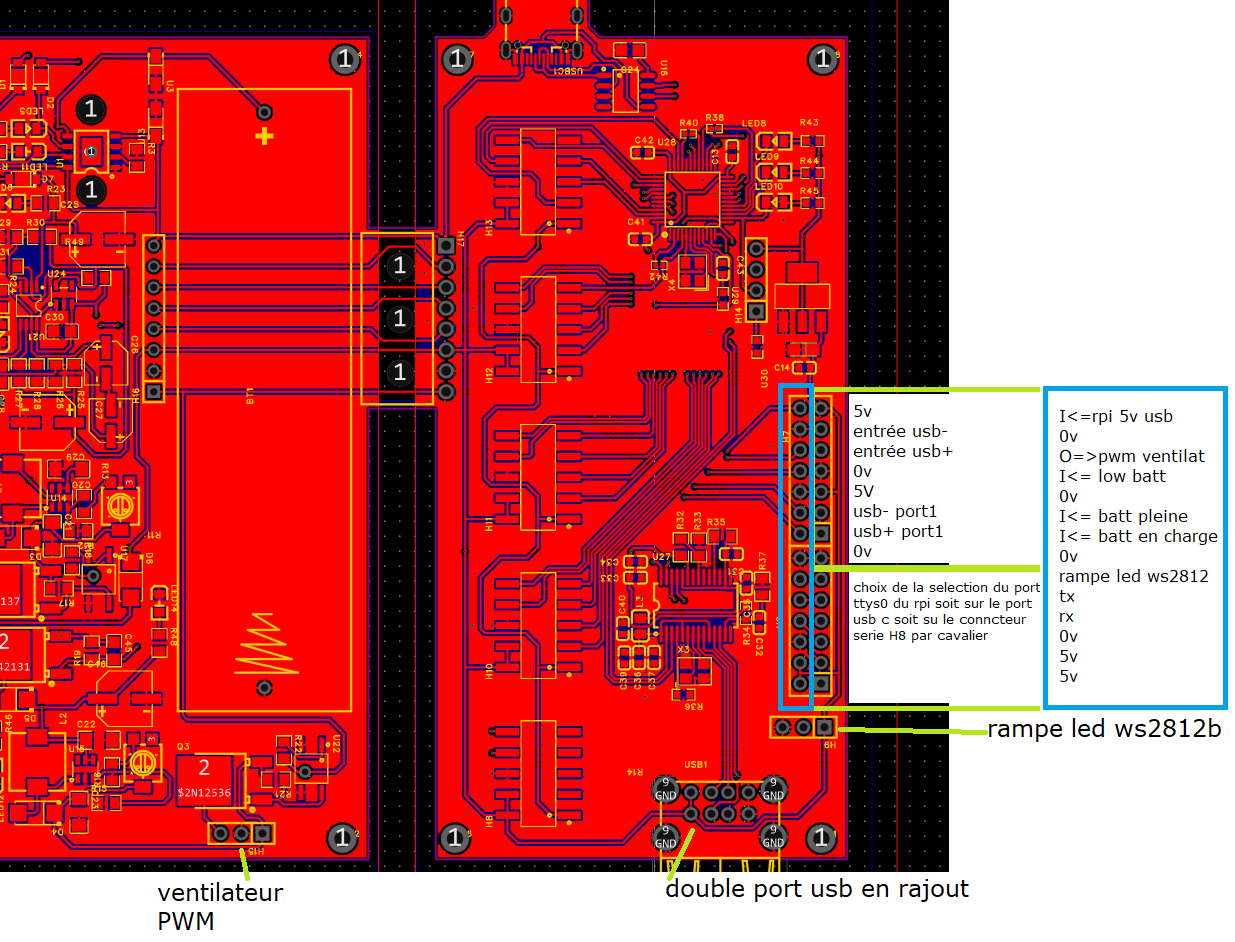
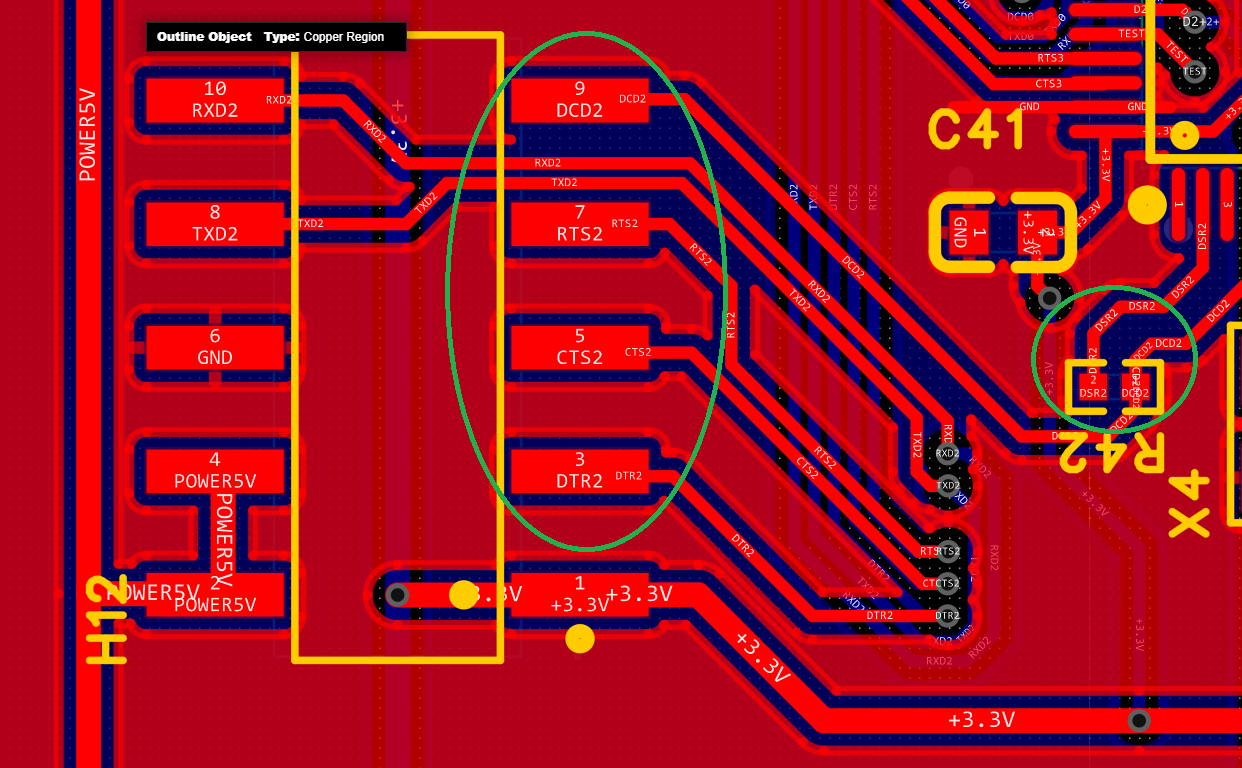
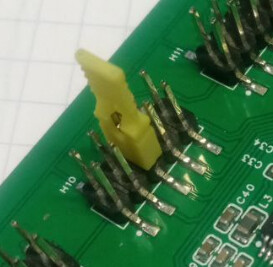
à gauche de l’AOP il y a un comparateur de tension pour envoyer le signal « low batt » au RPI, et à droite ce qui permet sur un front descendant d’activer une tempo de 2 seconde pour couper l’alimentation du raspberry et donc redémarrer automatique de raspberry en cas de réaparition du courant
Je vais donc finir de redessiner la version final
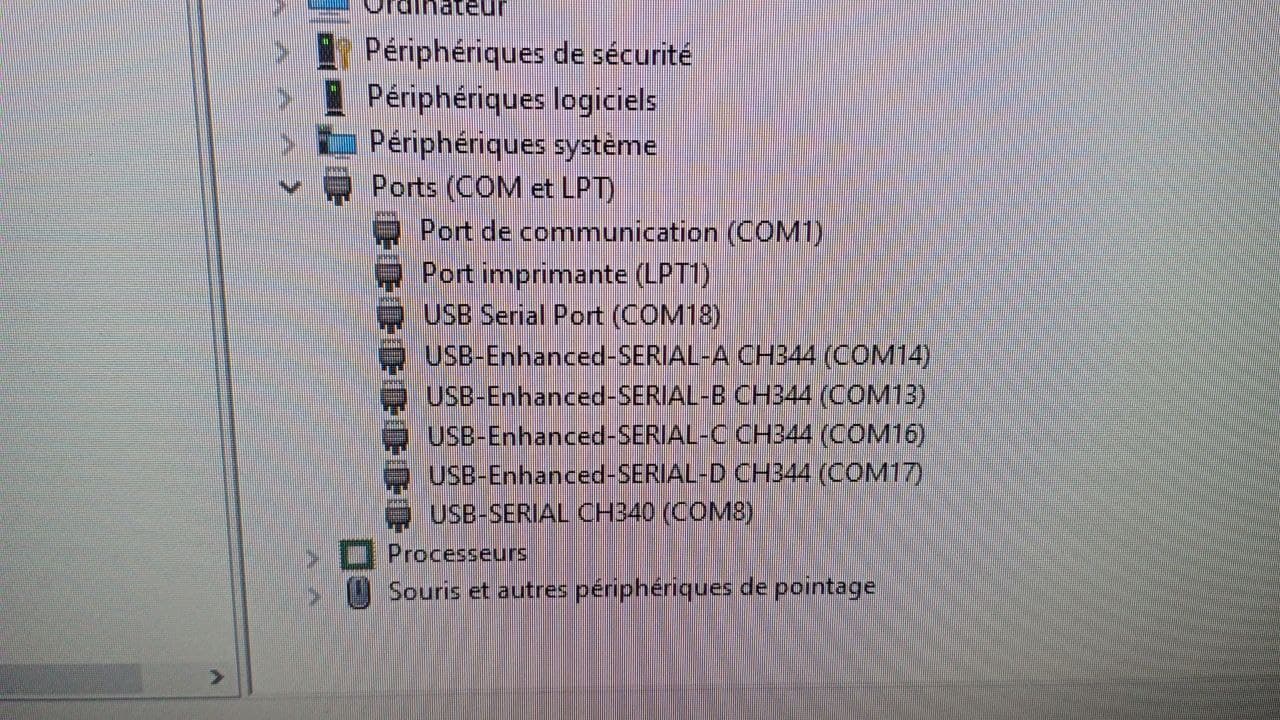
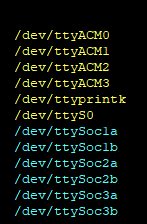
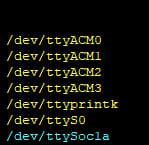
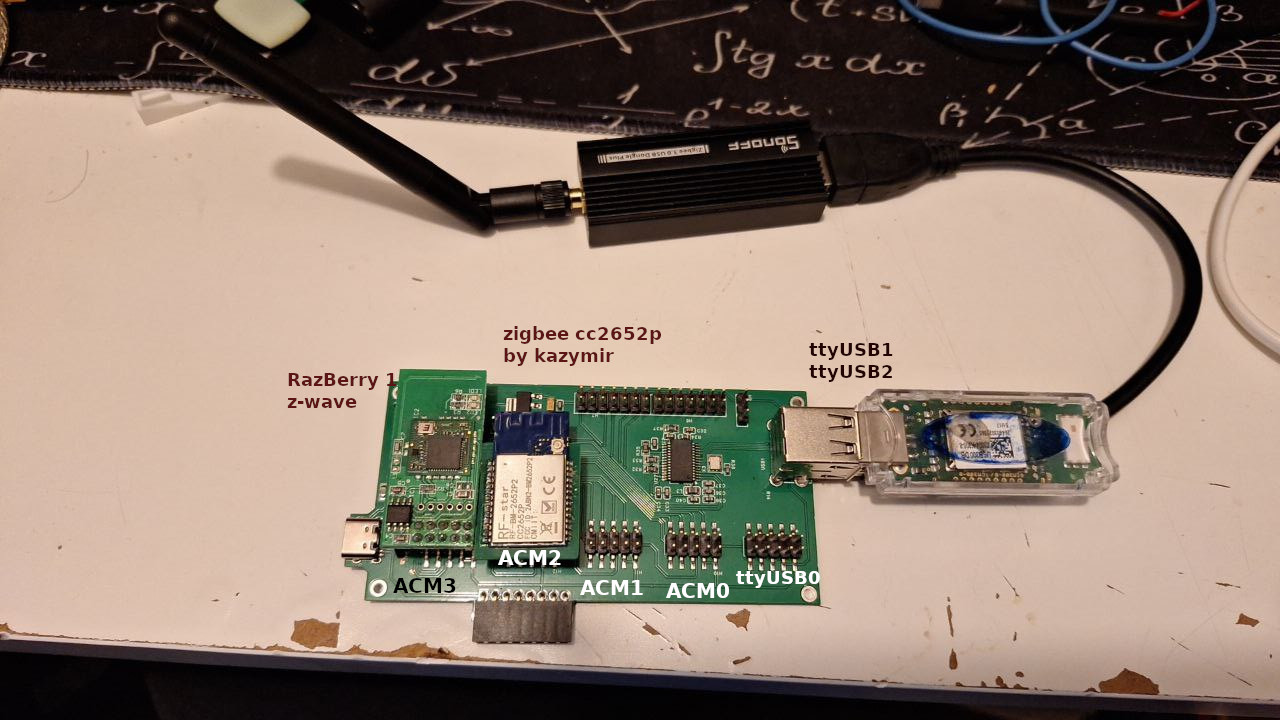
Pour l’USB host j’ai déjà testé donc je sais que c’est bon
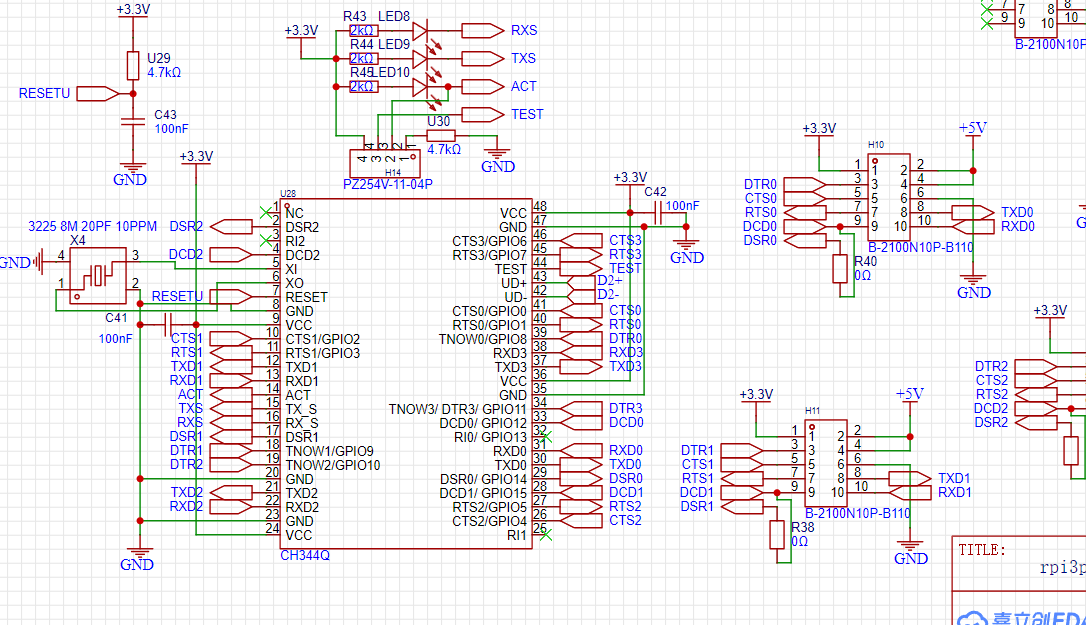
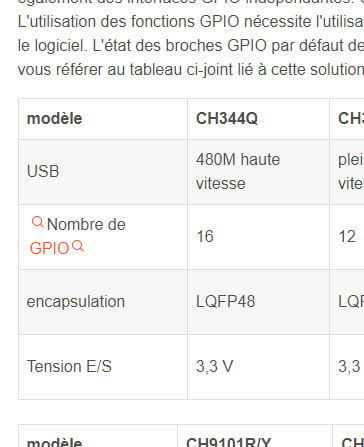
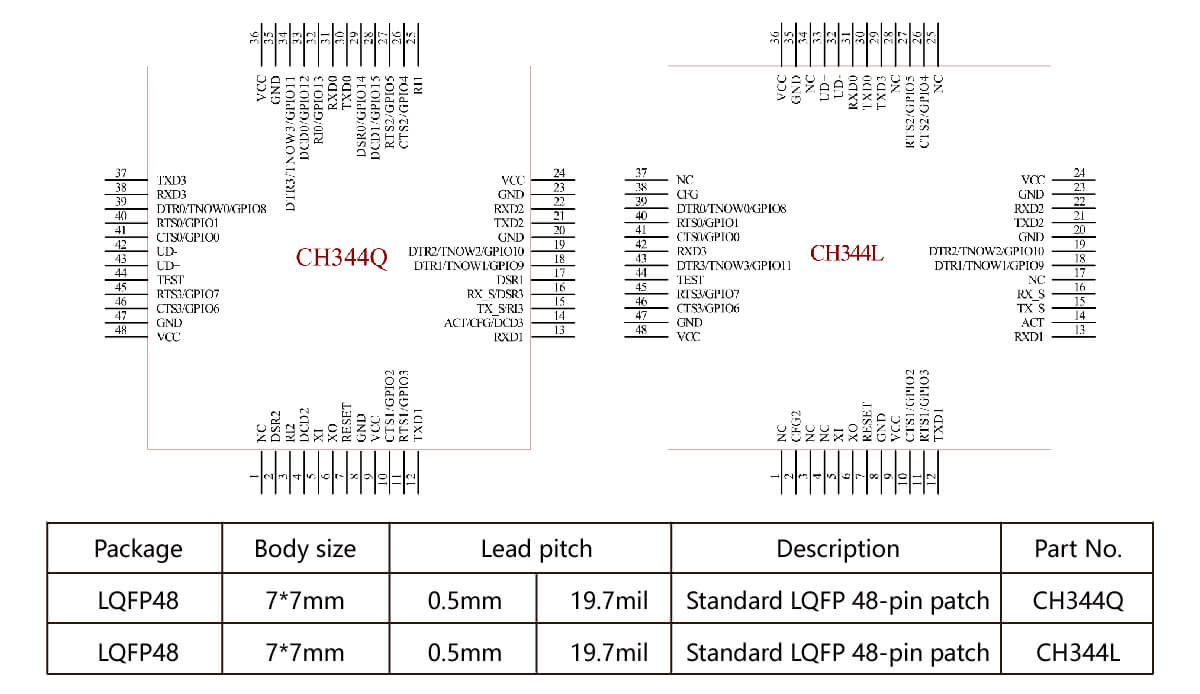
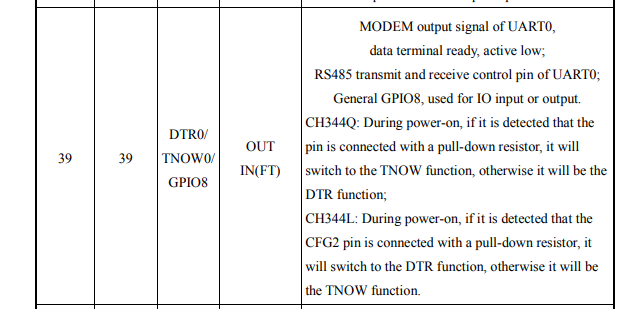
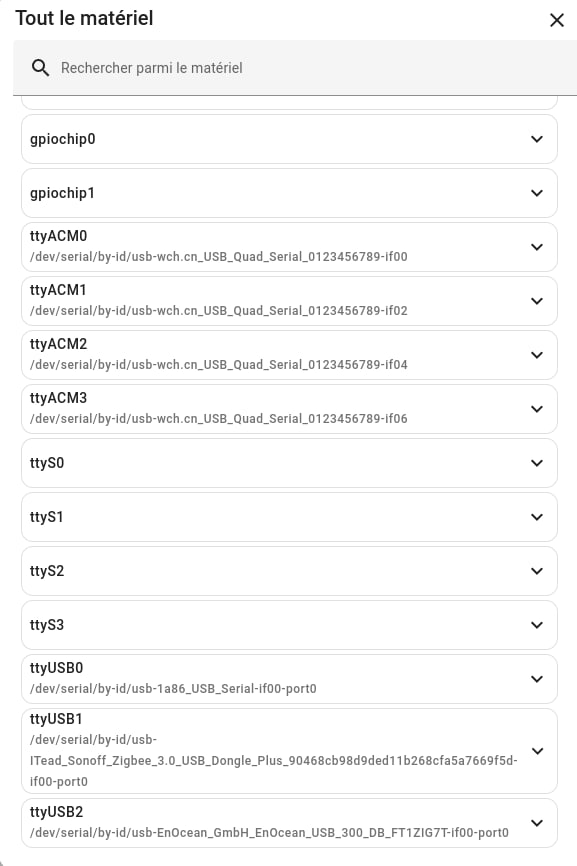
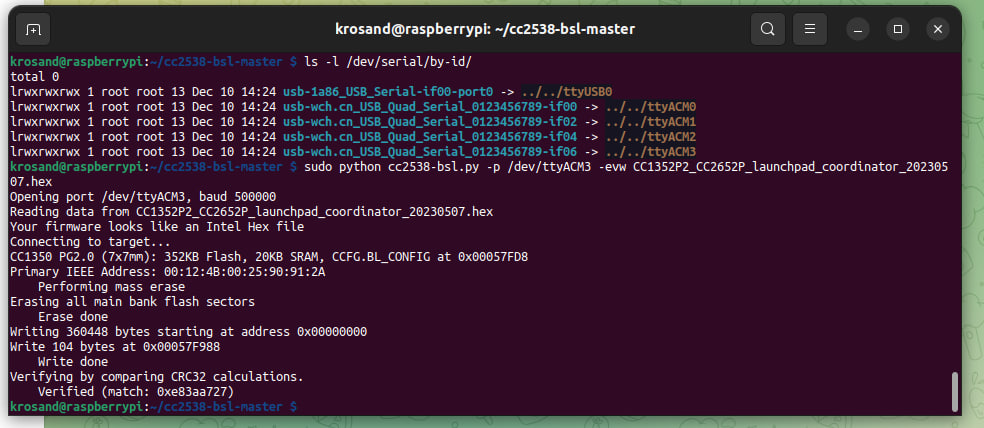
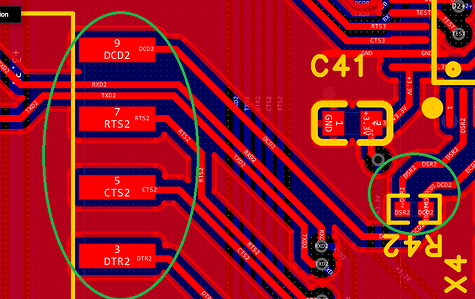
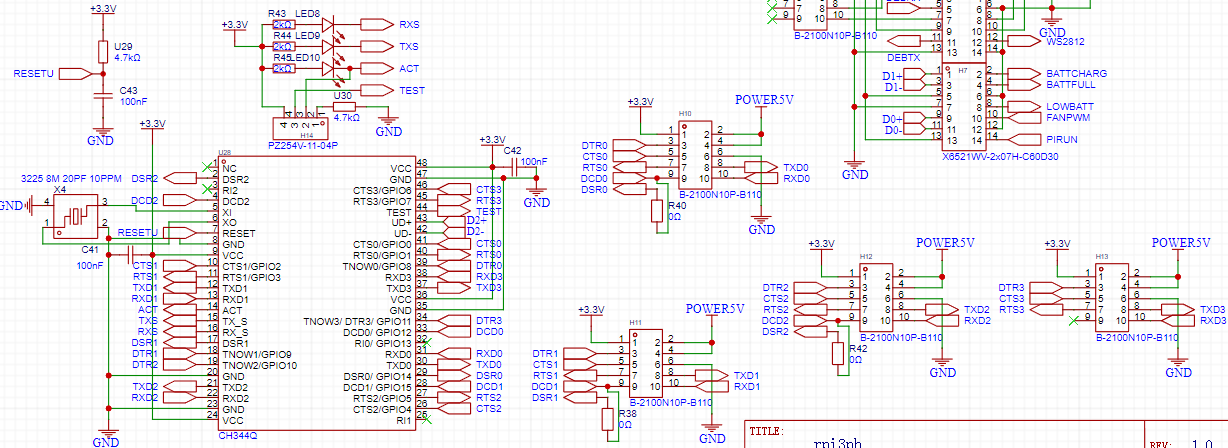
reste une inconnu sur l’ajout des 4 UART
au final dans mon nodered
[
{
"id": "7be44a6482ebe106",
"type": "mqtt in",
"z": "7d3e99c836519d65",
"name": "",
"topic": "testing",
"qos": "0",
"datatype": "auto-detect",
"broker": "129d6e906d9dd052",
"nl": false,
"rap": true,
"rh": 0,
"inputs": 0,
"x": 130,
"y": 340,
"wires": [
[
"e01b9b23d86b8a85"
]
]
},
{
"id": "a58743c7c8ad6e20",
"type": "mqtt out",
"z": "7d3e99c836519d65",
"name": "",
"topic": "test",
"qos": "0",
"retain": "",
"respTopic": "",
"contentType": "",
"userProps": "",
"correl": "",
"expiry": "",
"broker": "129d6e906d9dd052",
"x": 310,
"y": 420,
"wires": []
},
{
"id": "e01b9b23d86b8a85",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "debug 1",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"statusVal": "",
"statusType": "auto",
"x": 320,
"y": 340,
"wires": []
},
{
"id": "0d97a5c8ab4da729",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "",
"payloadType": "date",
"x": 150,
"y": 420,
"wires": [
[
"a58743c7c8ad6e20"
]
]
},
{
"id": "4b41ef5c5204a097",
"type": "rpi-gpio out",
"z": "7d3e99c836519d65",
"name": "",
"pin": "21",
"set": "",
"level": "0",
"freq": "",
"out": "out",
"bcm": true,
"x": 320,
"y": 520,
"wires": []
},
{
"id": "9c34faceb322983d",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "true",
"payloadType": "bool",
"x": 130,
"y": 500,
"wires": [
[
"4b41ef5c5204a097"
]
]
},
{
"id": "f3a935eda4afd647",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "false",
"payloadType": "bool",
"x": 130,
"y": 560,
"wires": [
[
"4b41ef5c5204a097"
]
]
},
{
"id": "fbe1135d.bfce5",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "Red",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "",
"topic": "",
"payload": "Red",
"payloadType": "str",
"x": 1030,
"y": 400,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "17e081ef.3a17de",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "0,0,255,0",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "",
"topic": "",
"payload": "0,0,255,00",
"payloadType": "str",
"x": 1020,
"y": 480,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "2a0af109.0b7bfe",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "",
"topic": "",
"payload": "black",
"payloadType": "str",
"x": 1030,
"y": 560,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "6f0edc5c.c63b14",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "0,255,0,0",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "",
"topic": "",
"payload": "0,255,0,0",
"payloadType": "str",
"x": 1020,
"y": 440,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "dcebc2d3.db8a4",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "0,0,00,255",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "",
"topic": "",
"payload": "0,0,0,255",
"payloadType": "str",
"x": 1020,
"y": 520,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "99e106f1.fae6d8",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "",
"topic": "",
"payload": "0,0,0,0",
"payloadType": "str",
"x": 1030,
"y": 600,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "df07c5fbcc36e807",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "White",
"payloadType": "str",
"x": 1030,
"y": 360,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "b93a663a5c922075",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "true",
"payloadType": "bool",
"x": 630,
"y": 500,
"wires": [
[
"38a7602d47691262"
]
]
},
{
"id": "38a7602d47691262",
"type": "function",
"z": "7d3e99c836519d65",
"name": "function 5",
"func": "//ligne 1\nmsg.payload=\"0,0,0,0\"; \nnode.send(msg);\nmsg.payload=\"1,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"2,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"3,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"4,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"5,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"6,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"7,0,0,0\"; \nnode.send(msg);\n\n//ligne 2\nmsg.payload=\"8,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"9,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"10,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"11,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"12,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"13,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"14,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"15,255,0,0\"; \nnode.send(msg);\n\n//ligne 3\nmsg.payload=\"16,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"17,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"18,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"19,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"20,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"21,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"22,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"23,255,0,0\"; \nnode.send(msg);\n\n//ligne 4\nmsg.payload=\"24,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"25,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"26,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"27,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"28,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"29,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"30,255,0,0\"; \nnode.send(msg);\nmsg.payload=\"31,255,255,0\"; \nnode.send(msg);\n\n//ligne 5\nmsg.payload=\"32,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"33,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"34,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"35,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"36,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"37,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"38,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"39,255,255,0\"; \nnode.send(msg);\n\n//ligne 6\nmsg.payload=\"40,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"41,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"42,3,34,76\"; \nnode.send(msg);\nmsg.payload=\"43,3,34,76\"; \nnode.send(msg);\nmsg.payload=\"44,3,34,76\"; \nnode.send(msg);\nmsg.payload=\"45,3,34,76\"; \nnode.send(msg);\nmsg.payload=\"46,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"47,255,255,0\"; \nnode.send(msg);\n\n//ligne 7\nmsg.payload=\"48,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"49,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"50,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"51,253,108,158\"; \nnode.send(msg);\nmsg.payload=\"52,253,108,158\"; \nnode.send(msg);\nmsg.payload=\"53,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"54,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"55,255,255,0\"; \nnode.send(msg);\n\n//ligne 8\nmsg.payload=\"56,0,0,0\"; \nnode.send(msg);\nmsg.payload=\"57,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"58,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"59,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"60,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"61,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"62,255,255,0\"; \nnode.send(msg);\nmsg.payload=\"63,0,0,0\"; \nnode.send(msg);\n\nreturn msg;",
"outputs": 1,
"timeout": 0,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"x": 820,
"y": 500,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "2e770991911e60eb",
"type": "exec",
"z": "7d3e99c836519d65",
"command": "cat /sys/class/thermal/thermal_zone0/temp",
"addpay": "",
"append": "",
"useSpawn": "false",
"timer": "",
"winHide": false,
"oldrc": false,
"name": "temp cpu",
"x": 940,
"y": 60,
"wires": [
[
"316532888c8c3ead"
],
[],
[]
]
},
{
"id": "bd684006345337af",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "temp",
"props": [
{
"p": "payload"
}
],
"repeat": "60",
"crontab": "",
"once": true,
"onceDelay": 0.1,
"topic": "",
"payload": "true",
"payloadType": "bool",
"x": 790,
"y": 60,
"wires": [
[
"2e770991911e60eb"
]
]
},
{
"id": "316532888c8c3ead",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "debug 4",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"statusVal": "",
"statusType": "auto",
"x": 1160,
"y": 60,
"wires": []
},
{
"id": "0a3240297ef278ac",
"type": "exec",
"z": "7d3e99c836519d65",
"command": "sudo shutdown -h now",
"addpay": "",
"append": "",
"useSpawn": "false",
"timer": "",
"winHide": false,
"oldrc": false,
"name": "",
"x": 980,
"y": 140,
"wires": [
[
"540bac65bd8233f7"
],
[],
[]
]
},
{
"id": "bcd2a5920769f6ed",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "halt",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "true",
"payloadType": "bool",
"x": 790,
"y": 100,
"wires": [
[
"0a3240297ef278ac"
]
]
},
{
"id": "540bac65bd8233f7",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "debug 5",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"statusVal": "",
"statusType": "auto",
"x": 1160,
"y": 140,
"wires": []
},
{
"id": "96a828994c70bb08",
"type": "exec",
"z": "7d3e99c836519d65",
"command": "sudo shutdown -r now",
"addpay": "",
"append": "",
"useSpawn": "false",
"timer": "",
"winHide": false,
"oldrc": false,
"name": "",
"x": 980,
"y": 200,
"wires": [
[
"57a4b4704c1732bf"
],
[],
[]
]
},
{
"id": "9b9c580aa00bc427",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "reboot",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "true",
"payloadType": "bool",
"x": 790,
"y": 200,
"wires": [
[
"96a828994c70bb08"
]
]
},
{
"id": "57a4b4704c1732bf",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "debug 6",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"statusVal": "",
"statusType": "auto",
"x": 1160,
"y": 200,
"wires": []
},
{
"id": "e953cecc.465ec",
"type": "rpi-neopixels",
"z": "7d3e99c836519d65",
"name": "",
"gpio": "12",
"pixels": "24",
"bgnd": "",
"fgnd": "",
"wipe": "2",
"mode": "pixels",
"rgb": "rgb",
"brightness": "100",
"gamma": true,
"x": 1270,
"y": 500,
"wires": []
},
{
"id": "1b9d722b7dd1408d",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "Blue",
"payloadType": "str",
"x": 1030,
"y": 320,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "5495fc007e565c79",
"type": "function",
"z": "7d3e99c836519d65",
"name": "Rainbow Effect",
"func": "var numberOfLEDs = 24;\n\nfor(i=0; i<255; i++){\n \n for(j=0; j<numberOfLEDs; j++){\n \n var pos = 0;\n pos = Math.round(((j*255/numberOfLEDs)+i))&255;\n \n if(pos<85){\n var red = pos*3;\n var green = 255-pos*3;\n var blue = 0;\n }\n else if(pos < 170){\n pos -= 85;\n var red = 255 - pos*3;\n var green = 0;\n var blue = pos*3;\n }\n else{\n pos -= 170;\n var red = 0;\n var green = pos*3;\n var blue = 255-pos*3;\n }\n var setColor = j+','+ red +','+ green +','+ blue;\n node.send({payload:setColor});\n }\n}",
"outputs": 1,
"timeout": "",
"noerr": 9,
"initialize": "",
"finalize": "",
"libs": [],
"x": 820,
"y": 420,
"wires": [
[
"e953cecc.465ec"
]
]
},
{
"id": "e3d2bb449bdbee18",
"type": "inject",
"z": "7d3e99c836519d65",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "true",
"payloadType": "bool",
"x": 630,
"y": 420,
"wires": [
[
"5495fc007e565c79"
]
]
},
{
"id": "8b848788f4bcbe1a",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "input pin ",
"active": false,
"tosidebar": true,
"console": true,
"tostatus": true,
"complete": "payload",
"targetType": "msg",
"statusVal": "payload",
"statusType": "auto",
"x": 530,
"y": 40,
"wires": []
},
{
"id": "7e357f0d4bf55e63",
"type": "function",
"z": "7d3e99c836519d65",
"name": "filtre shutdown",
"func": "if (msg.payload == \"1\" ){\n return msg;\n}",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"x": 320,
"y": 100,
"wires": [
[
"8b848788f4bcbe1a",
"0a3240297ef278ac"
]
]
},
{
"id": "39d1839abe8ef107",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "debug 10",
"active": false,
"tosidebar": true,
"console": true,
"tostatus": true,
"complete": "payload",
"targetType": "msg",
"statusVal": "payload",
"statusType": "auto",
"x": 310,
"y": 40,
"wires": []
},
{
"id": "faa8e3adf1ad2384",
"type": "rpi-gpio in",
"z": "7d3e99c836519d65",
"name": "",
"pin": "25",
"intype": "tri",
"debounce": "25",
"read": false,
"bcm": true,
"x": 130,
"y": 100,
"wires": [
[
"7e357f0d4bf55e63",
"39d1839abe8ef107"
]
]
},
{
"id": "432266c83987be5d",
"type": "rpi-gpio in",
"z": "7d3e99c836519d65",
"name": "",
"pin": "24",
"intype": "up",
"debounce": "25",
"read": true,
"bcm": true,
"x": 140,
"y": 160,
"wires": [
[
"8f39e512ad35ca1a",
"c470e0e0a66971fd"
]
]
},
{
"id": "2b4c59ac96abd336",
"type": "rpi-gpio in",
"z": "7d3e99c836519d65",
"name": "",
"pin": "23",
"intype": "up",
"debounce": "25",
"read": true,
"bcm": true,
"x": 140,
"y": 220,
"wires": [
[
"29a6860b2ea2e844",
"c470e0e0a66971fd"
]
]
},
{
"id": "558817f795166dd9",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "batt_char",
"active": false,
"tosidebar": true,
"console": true,
"tostatus": true,
"complete": "payload",
"targetType": "msg",
"statusVal": "payload",
"statusType": "auto",
"x": 530,
"y": 160,
"wires": []
},
{
"id": "4039f102521fb729",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "batt_full",
"active": false,
"tosidebar": true,
"console": true,
"tostatus": true,
"complete": "payload",
"targetType": "msg",
"statusVal": "payload",
"statusType": "auto",
"x": 530,
"y": 220,
"wires": []
},
{
"id": "8f39e512ad35ca1a",
"type": "InvertUltimate",
"z": "7d3e99c836519d65",
"name": "Invert",
"payloadPropName": "payload",
"x": 310,
"y": 160,
"wires": [
[
"558817f795166dd9"
]
]
},
{
"id": "c470e0e0a66971fd",
"type": "BooleanLogic",
"z": "7d3e99c836519d65",
"name": "",
"operation": "AND",
"inputCount": 2,
"topic": "result",
"x": 320,
"y": 280,
"wires": [
[
"4cde89108d136fa9"
]
]
},
{
"id": "4cde89108d136fa9",
"type": "debug",
"z": "7d3e99c836519d65",
"name": "no_power",
"active": false,
"tosidebar": true,
"console": true,
"tostatus": true,
"complete": "payload",
"targetType": "msg",
"statusVal": "payload",
"statusType": "auto",
"x": 530,
"y": 280,
"wires": []
},
{
"id": "29a6860b2ea2e844",
"type": "InvertUltimate",
"z": "7d3e99c836519d65",
"name": "Invert",
"payloadPropName": "payload",
"x": 310,
"y": 220,
"wires": [
[
"4039f102521fb729"
]
]
},
{
"id": "129d6e906d9dd052",
"type": "mqtt-broker",
"name": "",
"broker": "localhost",
"port": "1883",
"clientid": "",
"autoConnect": true,
"usetls": false,
"protocolVersion": "4",
"keepalive": "60",
"cleansession": true,
"autoUnsubscribe": true,
"birthTopic": "",
"birthQos": "0",
"birthRetain": "false",
"birthPayload": "",
"birthMsg": {},
"closeTopic": "",
"closeQos": "0",
"closeRetain": "false",
"closePayload": "",
"closeMsg": {},
"willTopic": "",
"willQos": "0",
"willRetain": "false",
"willPayload": "",
"willMsg": {},
"userProps": "",
"sessionExpiry": ""
}
]
le json si vous voulez le copier et l’importer dans votre nodered
reste un point dans l’immédiat
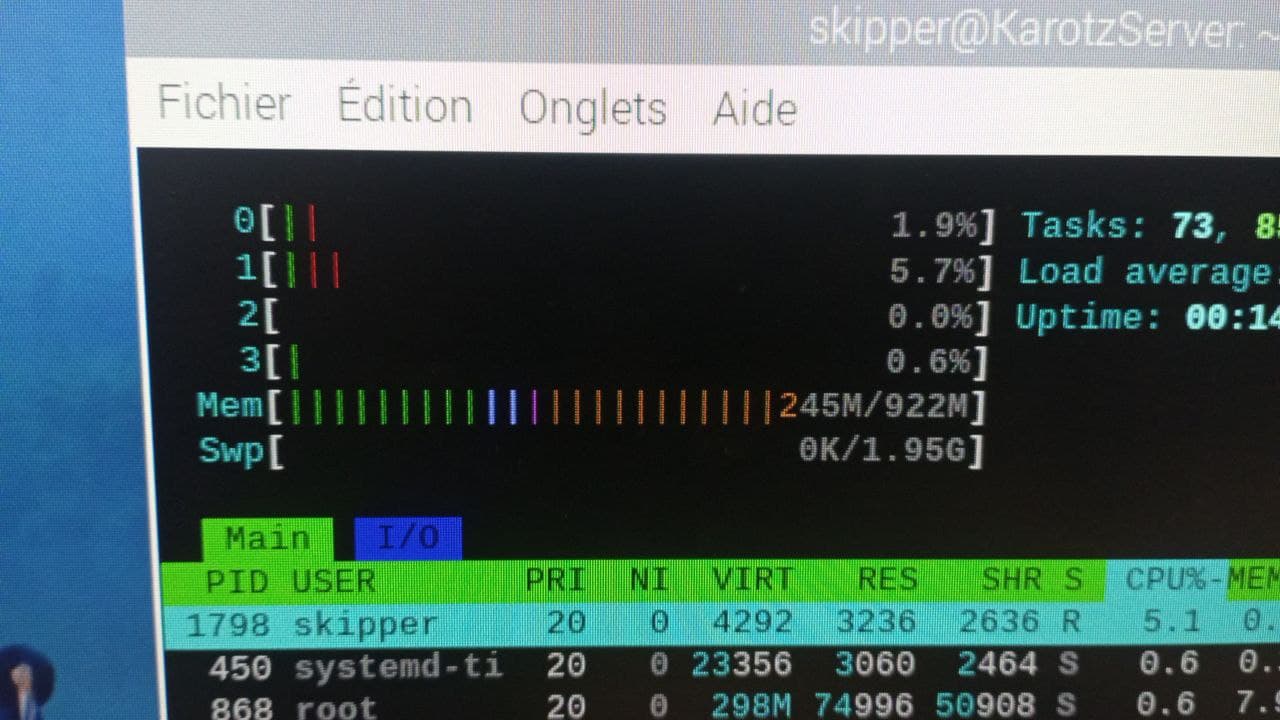
vraiment la swap est très petite
et là on a une emmc donc on peut s’amuser un peu et augmenter ça sans avoir peur de niq*er la carte sd
https://siebert.ovh/gnu_linux:raspberry:augmenter_la_taille_du_swap_sur_le_raspberry_pi
Par défaut sur Raspbian, la taille du swap est de 100 Mo. La ram étant assez limité sur le Raspberry pi (1 Go), 100 Mo peut ne pas suffire en swap. Avant d’augmenter le swap, je vous conseille d’utiliser un ma carte EMMC au lieu de la carte SD, ces cartes ayant un nombre de cycle lecture/écriture assez limité comparé à une EMMC.
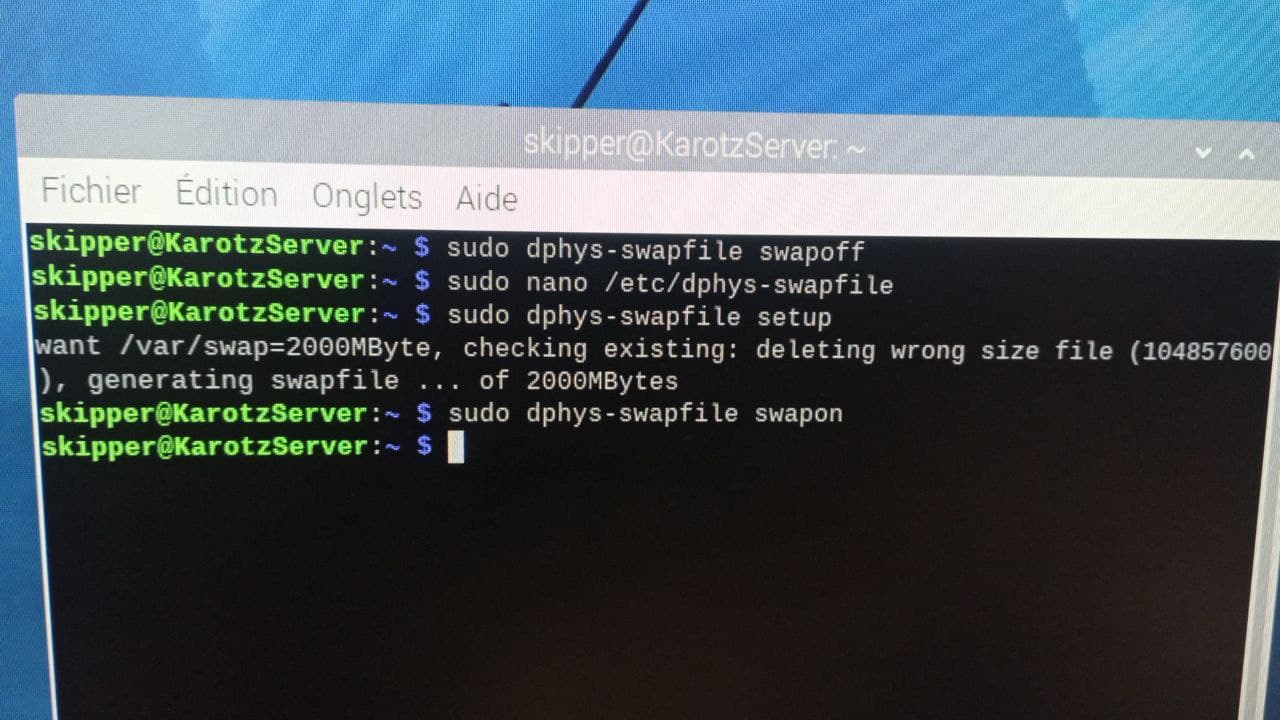
Commencez par désactiver le swap :
sudo dphys-swapfile swapoff
Pour modifier la taille du swap, qui se trouve dans /var/swap, ouvrez le fichier /etc/dphys-swapfile avec la commande
sudo nano /etc/dphys-swapfile
et modifiez la ligne “CONF_SWAPSIZE=100” en mettant la taille que vous souhaitez (la taille est exprimée en Mo). Pour mon cas 2000, juste comme ça au doigt mouillé.
Une fois le fichier modifié, il va falloir créer un nouveau fichier de swap
sudo dphys-swapfile setup
Il ne reste plus qu’à réactiver le swap :
sudo dphys-swapfile swapon
Je redessine la carte je la commande et on test la suite après