Merci.
La bitmap ne s’est pas mis à jour avec beta de ce midi Relais MOES et idem pour le Bouton AQARA.
Est-ce normal ?
Faut-il re-sélectionner le modèle, voir appairer de nouveau ?
Ok, enfin presque.
Le Relais MOES est OK avec une sélection manuelle. Pas facile à trouver si on ne sait pas qu’il est rangé en tuya! Ne devrait-il pas être reconnu en automatique? Bouton AQARA est tj bien reconnu en auto mais la bitmap n’est pas à jour (contours transparents)
Merci Loïc
penses tu intégrer les commandes de @mike au niveau du capteur de vibration
Citation
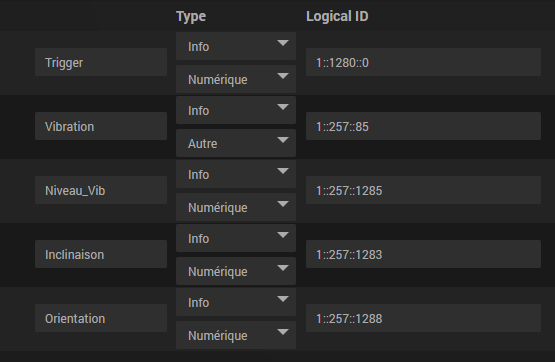
Il suffit d’ajouter les commandes :
1::257::85 pour type d’événement
1::257::1283 pour inclinaison
1::257::1288 pour orientation
1::257::1285 pour niveau de vibration (à diviser par 65536)
Super topic et super boulot ! J’ai sauté le pas et j’ai acquis le plugin Zigbee
J’ai reçu ma clé Conbee II aujourd’hui et j’ai des modules Aqara en stock depuis quelques jours. J’ai un petit souci d’installation avec le plugin Zigbee, le Demon reste en NOK malgré mes efforts
Le plugin étant en beta, la doc est pour le moment absente et je ne peux donc pas m’appuyer dessus. Pouvez-vous m’aider sur le paramétrage du plugin SVP ?
moi le daemon ne se lance pas après une mise a jour du plugin
il faut soit mettre le dépendance a jour
parfois juste cliquer sur redémarrer le daemon
parfois je dois cliquer sur redémarrer au niveau de la clef
En effet cela semble être identique. On reçoit les deux avec la même valeur d’après le log. Le 1::1280::0 me paraissait plus « évident » et en phase avec le json de config qui ne « parle » pas de cmd
Oups désolé j’ai effectivement oublié de préciser ma configuration :
Raspberry Pi3B+
Linux jeedom 5.4.72-v7+ #1356 SMP Thu Oct 22 13:56:54 BST 2020 armv7l GNU/Linux [10.6]
Jeedom V4.1.17
Merci à vous, grâce à votre aide j’ai pu paramétrer ma clé Conbee II et inclure mes premiers modules Zigbee
Je note une excellente portée de cette clé qui remonte sans souci les informations du capteur que j’ai installé dans le garage (10 mètres de distance avec 2 murs de briques et 1 mur de parpaings).
Je vais continuer à suivre ce topic avec un grand intérêt !
Il y en a un qui reste actif pendant 65 secondes (c’est normalement configurable) et l’autre qui est plus « fugitif ».
En fait ce capteur est incroyablement puissant, il donne de nombreuses valeurs et on ne peut aujourd’hui en exploiter qu’une infime partie dans jeedom (j’ai pu tester certaines implémentations et c’est vraiment puissant). Il est facile de conclure « ça ne marche pas », mais c’est plus compliqué que ça
Un résumé des fonctionnalités:
Sensor Status: can be used for displaying the following states: Vibration, Tilt, and Drop.
Vibration/Shock detection:: If « heavy » enough vibration continues, the sensor only sends subsequent vibration/shock detected messages every 60 seconds, so the device driver will is set up to reset motion to inactive after 65 seconds as a default, with a user-adjustable reset time in the preference section of the device details page
Tilt detection: The sensor sends a tilt detected message when it has been rotated in any direction, and both a Tilt Angle value message and XYZ accelerometer values message are sent when the sensor stops moving and has come to a resting position. Since acceleration is state-based, it needs to be reset to inactive when no more tilts are detected after some length of time.
Tilt Angle: This value is sent after the sensor has been rotated and come to a resting position. It is a relative value, so in other words, the difference in angle from the sensor’s previous resting position. It is not useful for determining an absolute open or closed position, however, which is why the XYZ Accelerometer value message data is used for that purpose.
Drop detection: The sensor sends this message whenever a free-fall drop is detected.
XYZ Accelerometer values*: These values are sent after the sensor has been rotated and come to a resting position. Unlike theTilt Angle report, they are absolute values, and in the device driver are converted to a 3-axis angle position. Although this calculated position is not extremely accurate, it is consistent enough to use for setting and storing absolute open and close positions.
*Change Sensitivity Level: The sensor has 3 hardware sensitivity levels: low, medium, and high
Ce qu’on peut reprocher aux gens de Xiaomi c’est que, aussi puissant que ce soit, les valeurs ne soit pas remontées de manière facilement exploitables. Devoir faire un développement spécifique pour extraire toutes les valeurs, ça n’aide pas à rendre l’utilisation facile. Bref, l’idée est brillante, mais l’implémentation est discutable si on ne souhaite pas se contenter des fonctions les plus basiques.
J’ai passé des heures à jouer avec des fonctions PHP pour extraire des choses exploitables, mais bon, je suis loin de mon objectif. Je pense que la limite est aussi coté Zigpy (le capteur remonte une longue chaine hexa que Zigpy transforme en bouillie et qu’il est donc un poil difficile d’exploiter).
EDIT : je pense avoir trouvé comme récupérer les angles x,y,z absolus. En fait, ce que j’ai appelé « orientation » (attribut 1::257::1288) est un décimal qu’il faut convertir en hexa pour en extraire les positions. J’arrive à obtenir des résultats (une position = une valeur) mais pas encore sur tous les axes. A suivre!





 Enfin si j’ai bien lu
Enfin si j’ai bien lu 


