Bonjour à tous
J’ai installé le plugin HUSQVARNA mais à l’ouverture j’ai un bandeau rouge avec le message : »class object not found ».
Je suis sur Jeedom Freebox Delta.
Je ne sais pas comment faire et surtout je ne sais pas ce que veux dire ce message.
Merci pour votre aide.
1 « J'aime »
Bonjour,
tout simplement ton plugin n’est pas compatible avec un peu de recherche su community tu aurais trouver l’information il faut modifier un fichier:
Voici un exemple:
remplacé dans plugins/googlecast/desktop/php/googlecast.php **object:all** par **jeeObject:all**
Après il n’y a plus qu’a croiser les doigts qu’il n’y ai pas d’autre problème
Merci pour l’aide
J’ai lu que le plugin était stable je pensais que ça voulait dire compatible.
Ou dois-je mettre votre ligne de commande exemple proposée?
Le plugin est passé en Legacy. Donc sous la main de Jeedom en Best-Effort
Quelqu’un a déjà fait une PR pour demander le changement nécessaire pour passer le plugin compatible V4. @Loic si tu passes par la, si tu peux valider la PR 
@Jayce44 si tu ne veut pas attendre, la modification a effectué est visible ici : Compatibilité Jeedom V4 PHP7.3 by Domochip · Pull Request #1 · jeedom/plugin-husqvarna · GitHub
En rouge ce qu’il faut remplacer, en vert ce que tu dois utiliser pour remplacer.
Donc clairement, ligne 102 du fichier desktop/php/husqvarna.php, tu remplaces object::all() par jeeObject::all()
Je connais pas le chemin de base de ton Jeedom mais tu peux trouver le fichier en faisant en CLI la commande :
find / -name husqvarna.php
Après @Loic est réactif (la période est compliqué) mais si tu attends un peu si tu as peur de faire la modification, elle sera intégré ASAP par Jeedom.
J’ai validé le pr ca sera en ligne demain sur le market.
1 « J'aime »
Merci
J’attends demain
Bonjour à tous,
J’utilise ce plugin depuis quelques mois sans problèmes.
J’étais par contre toujours frustré de ne pas avoir la position GPS du robot, ainsi que sa visualisation sur une carte.
En cherchant dans le code du plugin, j’ai vu qu’il était possible de récupérer la position du robot (en fait même les 50 dernières positions)
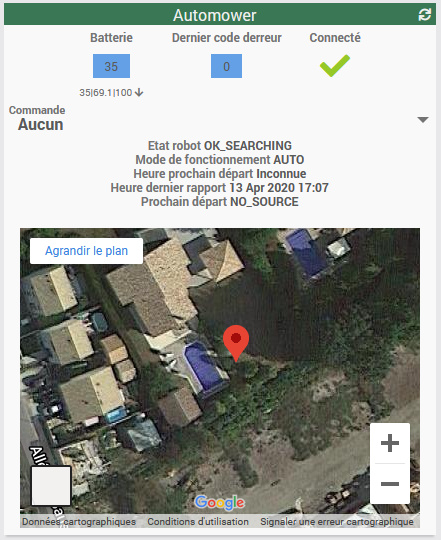
J’ai fait une modification en local, qui donne ceci:
Est-ce que cela intéresse d’autres utilisateurs ?
1 « J'aime »
Bonjour Lelas,
Bien sûr que ça nous intéresse
Peux-tu nous en dire un peu plus ?
Merci
Bonsoir,
En fait, le plugin fait une interrogation périodique toute les minutes du statut du robot à partir du site husqvarna en utilisant la commande get_status($mover_id).
Hors, cette commande revoie une info qui n’était pas utilisée par le plugin: le paramètre « lastLocations », qui est un tableau des 50 dernières positions du robot.
Exemple:
[« lastLocations »]=>
array(50) {
[0]=>
object(stdClass)#2 (3) {
[« latitude »]=>
float(xx.xxxxxxx)
[« longitude »]=>
float(y.yyyyyy)
[« gpsStatus »]=>
string(13) « USING_GPS_MAP »
}
[1]=> …
J’ai donc ajouté une info dans le plugin : « lastLocations », que je mets à jour avec la position [0], la plus récente.
Ensuite, j’ai utilisé un widget custom sur jeedom V4 pour afficher une carte autour du point GPS.
(J’avais trouvé un exemple sur le forum jeedom.)
Je vais continuer à chercher pour optimiser l’affichage par défaut de la carte.
Pour le moment, elle est en mode map plutôt que satellite, et pas assez « zoomée ». Il faut modifier l’affichage à la main sur le widget.
SI quelqu’un veut l’essayer, je peux envoyer le code source.
J’ai continué à enrichir avec l’utilisation des retours GPS.
Cela donne ceci:

On voit la position courante du robot avec le cercle vert, et les 50 dernières positions en rouge.
J’ai baissé progressivement le niveau de transparence pour indiquer les points les plus anciens.
J’ai ajouté également un champ avec le code d’erreur en clair (« statut erreur ») parmi les 44 définis.
2 « J'aime »
Bonjour,
Superbe travail ! Cela améliore bien le widget du plugin.
Tu as la possibilité de le partager ?
Bonjour,
Je continue à enrichir ce plugin, en ajoutant une page de type « panel » qui affichera des statistiques d’utilisation du robot, ainsi qu’un historique des positions GPS. (afin de se faire une idée sur les zones potentiellement moins couvertes par le robot)
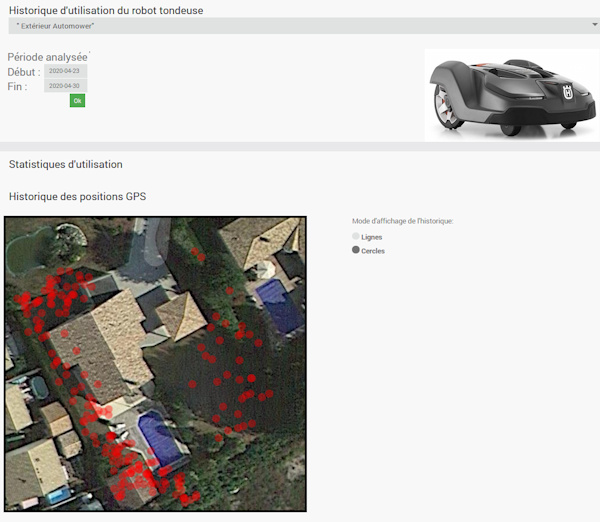
Et par la suite, je pense intégrer une planification des horaires de fonctionnement dans le plugin, ainsi qu’un couplage avec le plugin « pluie à 1h » pour mettre le robot en arrêt en cas de pluie.
Je peux partager ma version courante en MP avec ceux qui sont intéressés.
(avec quelques recommandations de modifs car quelques paramètres sont « en dur » dans le code pour le moment. Je les ajouterai en page de configuration par la suite)
Bonjour
tu pourrais partager ton code sur Github ? cela permettrait de l’intégrer dans la branche master
En attendant, peux tu me communiquer ton code ?
Bonjour t0urista,
Que veux tu dire par : « cela permettrait de l’intégrer dans la branche master »
Tu parles de la branche master de quel repository ?
J’ai compris que le plugin actuel était géré en mode « best effort » par l’équipe jeedom.
En ce qui concerne le partage sur Github, j’étais en train de le mettre en place.
C’est fait depuis ce soir: voir le sujet:
Bonjour à tous,
Comment appeler une commande de la liste déroulante (Démarrer, arreter ou ranger) dans un scénario ?
Ce n’est pas pas possible ?
Merci d’avance.
Bonjour jhauwel,
Tu peux le faire: dans le scénario tu peux choisir le paramètre de la commande:

Lelas
Bonjour à tous,
J’ai un Atomower 310 et je n’ai pas pris le KIT GPS à 299€.
Mais je peux quand même voir les erreurs ou gérer le robot via l’application Atomower connect car il est connectée en bluetooth.
J’aimerai pouvoir recevoir les messages d’erreurs sur jeedom.
Est-ce que le Plugin husqvarna jeedom peux récupérer les infos en bluetooth sans avoir à acheter le kit GPS à KIT GPS à 299€ ?
Merci
Non, le plugins est connecté au compte Husqvarna dans le cloud. Ce compte est alimenté par le robot en 3G, et il ne peut pas communiquer avec le robot en bluetooth.