merci ngrataloup, je vais éplucher ma config frigate, je ne savais pas qu’il y avait une incidence sur l’ordre de détection. Pour ce qui est du flux SUB, j’ai désactivé sur toutes mes caméras l’an passé, celà m’a permis déjà d’économiser du CPU. je ne travaille donc plus que sur un flux par camera…
Pour l’instant, j’ai désactivé le docker frigate et basculé toutes mes caméras sur mon autre frigate. Le plugin a été réactivé, pour voir si le système se comporte à nouveau normalement.
Pour les 5% de disque restant, rien d’alarmant, j’ai des purges programmées sur mon système … mais bon, je vais tout de même passer un coup de balai  .
.
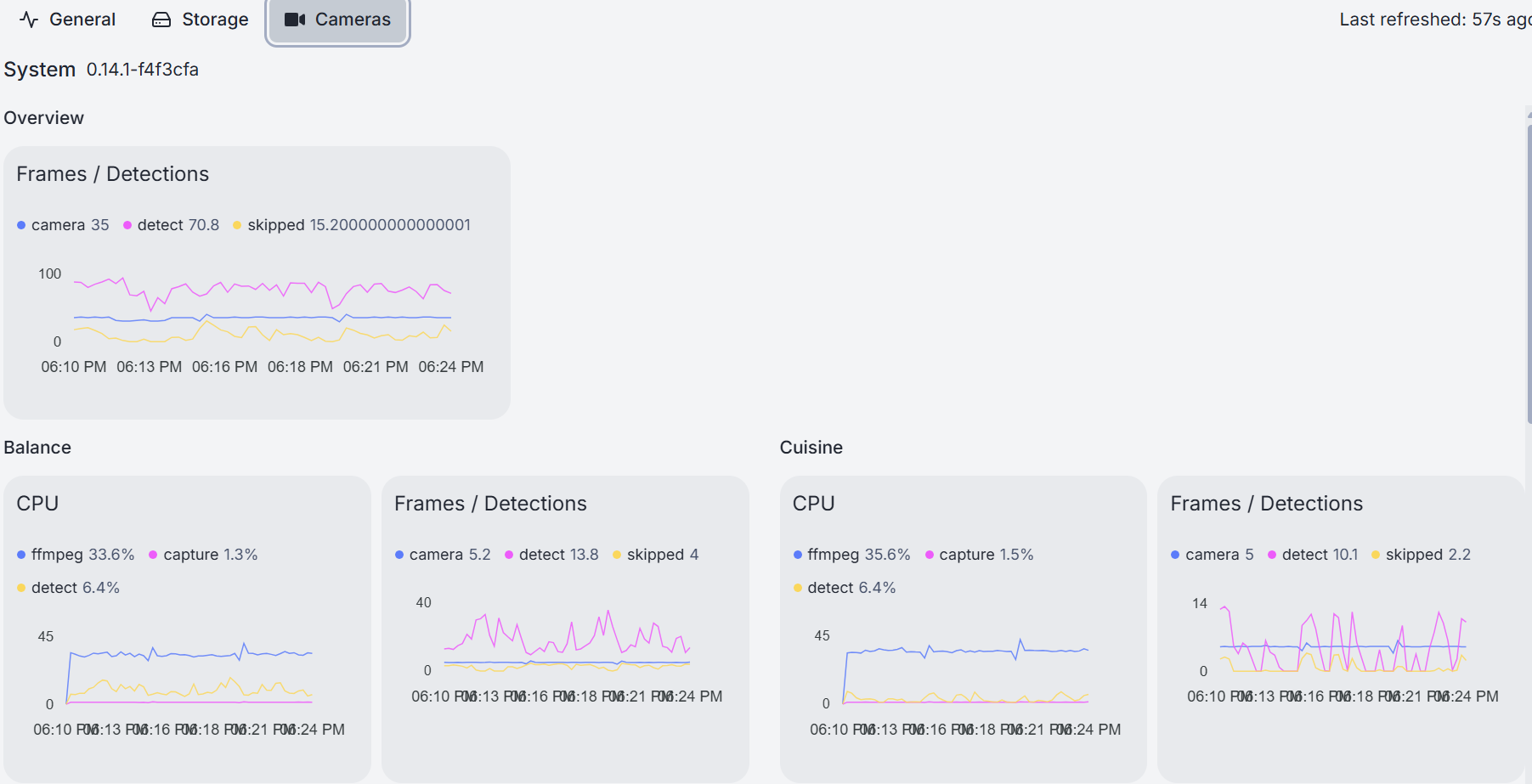
Voici ce que j’ai en conso coté frigate sur mon secondaire (j’ai tout basculé dessus, sauf deux cameras que j’ai désactivées car CPU à 96%) :
Ma config Frigate secondaire :
#ui:
use_experimental: true
version: 0.14
mqtt:
enabled: true
host: 10.0.0.18
port: 1883
topic_prefix: frigate
user: jeedom
password: xxxxxxxxxx
detectors: # <---- add detectors
coral:
type: edgetpu
device: pci
logger:
default: info
logs:
frigate.mqtt: info
audio: # ← enable audio events for all camera
enabled: false
listen:
- bark
- fire_alarm
- scream
- speech
- yell
- crying
- laughter
- dog
- car_alarm
- explosion
- gunshot
- fusillade
- glass
- bark
- honk
- thunderstorm
- thunder
- wind
- alarm
- siren
- civil_defense_siren
- smoke_detector
- fire_alarm
- television
record:
enabled: true
retain:
days: 0
mode: active_objects
events:
pre_capture: 5
post_capture: 5
retain:
default: 1
mode: active_objects
snapshots:
enabled: true
clean_copy: true
timestamp: true
bounding_box: true
crop: false
retain:
default: 2
detect:
fps: 5
width: 1280
height: 720
Optional: Number of consecutive detection hits required for an object to be initialized in the tracker. (default: 1/2 the frame rate)
min_initialized: 2
Optional: Number of frames without a detection before Frigate considers an object to be gone. (default: 5x the frame rate)
max_disappeared: 25
Optional: Configuration for stationary object tracking
stationary:
# Optional: Frequency for confirming stationary objects (default: same as threshold)
# When set to 1, object detection will run to confirm the object still exists on every frame.
# If set to 10, object detection will run to confirm the object still exists on every 10th frame.
interval: 50
# Optional: Number of frames without a position change for an object to be considered stationary (default: 10x the frame rate or 10s)
threshold: 250
# Optional: Define a maximum number of frames for tracking a stationary object (default: not set, track forever)
# This can help with false positives for objects that should only be stationary for a limited amount of time.
# It can also be used to disable stationary object tracking. For example, you may want to set a value for person, but leave
# car at the default.
# WARNING: Setting these values overrides default behavior and disables stationary object tracking.
# There are very few situations where you would want it disabled. It is NOT recommended to
# copy these values from the example config into your config unless you know they are needed.
max_frames:
# Optional: Default for all object types (default: not set, track forever)
default: 3000
# Optional: Object specific values
objects:
person: 1000
model:
#path: /docker/frigate/config/model.yml
width: 320
height: 320
input_tensor: nhwc
input_pixel_format: bgr
labelmap:
0: person
1: bicycle
2: car
3: motorcycle
7: car
16: animal
17: dog
#22: shoe
#23: handbag
#24: suitcase
#29: laptop
#25: bootle
#26: chair
#27: door
#71: tv
#0: person #1: bicycle #2: car #3: motorcycle #4: airplane #5: bus
#6: train #7: car #8: boat #9: traffic light #10: fire hydrant
#11: street sign #12: stop sign #13: parking meter #14: bench #15: bird
#16: cat #17: dog #18: horse #19: sheep
#20: cow #21: elephant #22: bear #23: zebra #24: giraffe
#25: hat #26: backpack #27: umbrella #28: shoe #29: eye glasses
#30: handbag #31: tie #32: suitcase #33: frisbee #34: skis
#35: snowboard #36: sports ball #37: kite #38: baseball bat #39: baseball glove
#40: skateboard #41: surfboard #42: tennis racket #43: bottle #44: plate
#45: wine glass #46: cup #47: fork #48: knife #49: spoon
#50: bowl #51: banana #52: apple #53: sandwich #54: orange
#55: broccoli #56: carrot #57: hot dog #58: pizza #59: donut
#60: cake #61: chair #62: couch #63: potted plant #64: bed
#65: mirror #66: dining table #67: window #68: desk #69: toilet
#70: door #71: tv #72: laptop #73: mouse #74: remote
#75: keyboard #76: cell phone #77: microwave #78: oven #79: toaster
#80: sink #81: refrigerator #82: blender #83: book #84: clock
#85: vase #86: scissors #87: teddy bear #88: hair drier #89: toothbrush
#90: hair brush
go2rtc:
streams:
portail:
- ffmpeg:https://10.3.17.71/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=jeedom_rdc&password=XXXXXXXXX;#video=copy#audio=copy#audio=opus
portail_sub:
portail2:
- ffmpeg:https://10.3.17.70/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=jeedom_rdc&password=XXXXXXXXX;#video=copy#audio=copy#audio=opus
portail2_sub:
portail3:
- ffmpeg:https://10.3.17.78/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=jeedom_rdc&password=XXXXXXXXX;#video=copy#audio=copy#audio=opus
portail3_sub:
balance:
- ffmpeg:https://10.3.17.73/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=jeedom_rdc&password=XXXXXXXXX;#video=copy#audio=copy#audio=opus
balance_sub:
piscine:
- ffmpeg:https://10.3.17.72/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=jeedom_rdc&password=XXXXXXXXX;#video=copy#audio=copy#audio=opus
piscine_sub:
zoomst:
zoomst_sub:
zoomsalon:
zoomsalon_sub:
cuisine:
- ffmpeg:https://10.3.17.75/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=jeedom_rdc&password=XXXXXXXXX;#video=copy#audio=copy#audio=opus
cuisine_sub:
salon:
- ffmpeg:https://10.3.17.74/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=jeedom_rdc&password=XXXXXXXXX;#video=copy#audio=copy#audio=opus
salon_sub:
Optional: Object configuration
NOTE: Can be overridden at the camera level
objects:
Optional: list of objects to track from labelmap.txt (default: shown below)
track:
- person
- dog
- car
- bicycle
- motorcycle
- vehicule
Optional: mask to prevent all object types from being detected in certain areas (default: no mask)
Checks based on the bottom center of the bounding box of the object.
NOTE: This mask is COMBINED with the object type specific mask below
#mask: 0,0,1000,0,1000,200,0,200
Optional: filters to reduce false positives for specific object types
filters:
person:
# Optional: minimum widthheight of the bounding box for the detected object (default: 0)
min_area: 5000
# Optional: maximum widthheight of the bounding box for the detected object (default: 24000000)
max_area: 100000
# Optional: minimum width/height of the bounding box for the detected object (default: 0)
min_ratio: 0.5
# Optional: maximum width/height of the bounding box for the detected object (default: 24000000)
max_ratio: 2.0
# Optional: minimum score for the object to initiate tracking (default: shown below)
min_score: 0.5
# Optional: minimum decimal percentage for tracked object’s computed score to be considered a true positive (default: shown below)
threshold: 0.7
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object
Include all cameras by default in Birdseye view
birdseye:
enabled: true
width: 2550
height: 1280
mode: continuous
layout:
scaling_factor: 3.0
motion:
Optional: The threshold passed to cv2.threshold to determine if a pixel is different enough to be counted as motion. (default: shown below)
Increasing this value will make motion detection less sensitive and decreasing it will make motion detection more sensitive.
The value should be between 1 and 255.
threshold: 20
# Optional: Minimum size in pixels in the resized motion image that counts as motion (default: shown below)
Increasing this value will prevent smaller areas of motion from being detected. Decreasing will
make motion detection more sensitive to smaller moving objects.
As a rule of thumb:
- 10 - high sensitivity
- 30 - medium sensitivity
- 50 - low sensitivity
contour_area: 10
# Optional: The percentage of the image used to detect lightning or other substantial changes where motion detection
needs to recalibrate. (default: shown below)
Increasing this value will make motion detection more likely to consider lightning or ir mode changes as valid motion.
Decreasing this value will make motion detection more likely to ignore large amounts of motion such as a person approaching
a doorbell camera.
lightning_threshold: 0.8
ffmpeg:
output_args:
record: preset-record-generic-audio-aac
cameras:
portail:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/portail
input_args: preset-rtsp-restream
roles:
- record
- audio
- detect
detect:
enabled: true
live:
stream_name: portail
birdseye:
enabled: true
order: 1
objects:
track:
- person
- vehicle
- animal
- dog
- car
filters:
person:
min_score: 0.7
# Optional: minimum decimal percentage for tracked object’s computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
motion:
mask: 0,0.006,0.39,0.006,0.296,0.119,0,0.307
threshold: 14
contour_area: 10
improve_contrast: ‹ true ›
portail2:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/portail2
input_args: preset-rtsp-restream
roles:
- record
#- audio
- detect
detect:
enabled: true
live:
stream_name: portail2
birdseye:
enabled: true
order: 2
objects:
track:
- person
- car
- vehicle
- animal
- dog
filters:
car:
mask:
- 906,121,889,506,1280,508,1205,131
person:
min_score: 0.7
# Optional: minimum decimal percentage for tracked object’s computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
portail3:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/portail3
input_args: preset-rtsp-restream
roles:
- record
- detect
detect:
enabled: true
live:
stream_name: portail3
birdseye:
enabled: true
order: 3
objects:
track:
- person
- vehicle
- animal
- dog
- car
filters:
person:
min_score: 0.7
# Optional: minimum decimal percentage for tracked object’s computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
balance:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/balance
input_args: preset-rtsp-restream
roles:
- record
- detect
detect:
enabled: true
live:
stream_name: rtsp_balance
birdseye:
enabled: true
order: 4
objects:
track:
- person
- animal
- dog
filters:
person:
min_score: 0.7
# Optional: minimum decimal percentage for tracked object’s computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
piscine:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/piscine
input_args: preset-rtsp-restream
roles:
- record
#- audio
- detect
# Optional: Configuration for the jpg snapshots published via MQTT
detect:
enabled: true
live:
stream_name: rtsp_piscine
birdseye:
enabled: true
order: 5
objects:
track:
- animal
- dog
filters:
person:
mask:
- 665,621,521,605,518,470,643,486
min_score: 0.7
# Optional: minimum decimal percentage for tracked object’s computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
zoomsalon:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/zoomsalon
input_args: preset-rtsp-restream
roles:
- record
- audio
- path: rtsp://127.0.0.1:8554/zoomsalon_sub
input_args: preset-rtsp-restream
roles:
- detect
# Optional: Configuration for the jpg snapshots published via MQTT
detect:
enabled: true
live:
stream_name: rtsp_zoomsalon
birdseye:
enabled: true
order: 6
objects:
track:
- person
- animal
- dog
- bird
filters:
person:
min_score: 0.7
# Optional: minimum decimal percentage for tracked object’s computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
zoomst:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/zoomst
input_args: preset-rtsp-restream
roles:
- record
- audio
- path: rtsp://127.0.0.1:8554/zoomst_sub
input_args: preset-rtsp-restream
roles:
- detect
# Optional: Configuration for the jpg snapshots published via MQTT
detect:
enabled: true
live:
stream_name: rtsp_zoomst
birdseye:
enabled: true
order: 7
objects:
track:
- person
- animal
- dog
filters:
person:
min_score: 0.7
# Optional: minimum decimal percentage for tracked object’s computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
cuisine:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/cuisine
input_args: preset-rtsp-restream
roles:
- record
- audio
- path: rtsp://127.0.0.1:8554/cuisine_sub
input_args: preset-rtsp-restream
roles:
- detect
# Optional: Configuration for the jpg snapshots published via MQTT
detect:
enabled: true
live:
stream_name: rtsp_cuisine
birdseye:
enabled: true
order: 8
objects:
track:
- person
- animal
- dog
- bird
filters:
person:
min_score: 0.7
# Optional: minimum decimal percentage for tracked object's computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
salon:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/salon
input_args: preset-rtsp-restream
roles:
- record
- audio
- path: rtsp://127.0.0.1:8554/salon_sub
input_args: preset-rtsp-restream
roles:
- detect
# Optional: Configuration for the jpg snapshots published via MQTT
detect:
enabled: true
live:
stream_name: rtsp_salon
birdseye:
enabled: true
order: 9
objects:
track:
- person
- animal
- dog
- bird
filters:
person:
min_score: 0.7
# Optional: minimum decimal percentage for tracked object's computed score to be considered a true positive (default: shown below)
threshold: 0.75
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object live:
camera_groups:
BirdsEye:
order: 1
icon: LuZoomIn
cameras: birdseye
Exterieur:
order: 2
icon: LuCloudSun
cameras:
- balance
- piscine
- portail
- portail2
- portail3
Interieur:
order: 3
icon: LuArmchair
cameras:
- cuisine
- zoomst
- zoomsalon
- salon