Je ne suis pas expert mais il semble que oui.
#
# Author: See contributors at https://github.com/JurajNyiri/pytapo/graphs/contributors
#
import hashlib
import json
import requests
import urllib3
from .const import ERROR_CODES
from .media_stream.session import HttpMediaSession
urllib3.disable_warnings(urllib3.exceptions.InsecureRequestWarning)
class Tapo:
def __init__(self, host, user, password, cloudPassword=""):
self.host = host
self.user = user
self.password = password
self.cloudPassword = cloudPassword
self.stok = False
self.userID = False
self.headers = {
"Host": self.host,
"Referer": "https://{host}".format(host=self.host),
"Accept": "application/json",
"Accept-Encoding": "gzip, deflate",
"User-Agent": "Tapo CameraClient Android",
"Connection": "close",
"requestByApp": "true",
"Content-Type": "application/json; charset=UTF-8",
}
self.hashedPassword = hashlib.md5(password.encode("utf8")).hexdigest().upper()
self.hashedCloudPassword = (
hashlib.md5(cloudPassword.encode("utf8")).hexdigest().upper()
)
self.basicInfo = self.getBasicInfo()
self.presets = self.isSupportingPresets()
if not self.presets:
self.presets = {}
def isSupportingPresets(self):
try:
presets = self.getPresets()
return presets
except Exception:
return False
def getHostURL(self):
return "https://{host}/stok={stok}/ds".format(host=self.host, stok=self.stok)
def getStreamURL(self):
return "{host}:8800".format(host=self.host)
def ensureAuthenticated(self):
if not self.stok:
return self.refreshStok()
return True
def refreshStok(self):
url = "https://{host}".format(host=self.host)
data = {
"method": "login",
"params": {
"hashed": True,
"password": self.hashedPassword,
"username": self.user,
},
}
res = requests.post(
url, data=json.dumps(data), headers=self.headers, verify=False
)
if self.responseIsOK(res):
self.stok = res.json()["result"]["stok"]
return self.stok
raise Exception("Invalid authentication data")
def responseIsOK(self, res):
if res.status_code != 200:
raise Exception(
"Error communicating with Tapo Camera. Status code: "
+ str(res.status_code)
)
try:
data = res.json()
return data["error_code"] == 0
except Exception as e:
raise Exception("Unexpected response from Tapo Camera: " + str(e))
def performRequest(self, requestData, loginRetry=False):
self.ensureAuthenticated()
url = self.getHostURL()
res = requests.post(
url, data=json.dumps(requestData), headers=self.headers, verify=False
)
if self.responseIsOK(res):
return res.json()
else:
data = json.loads(res.text)
# -40401: Invalid Stok
if (
data
and "error_code" in data
and data["error_code"] == -40401
and not loginRetry
):
self.refreshStok()
return self.performRequest(requestData, True)
else:
raise Exception(
"Error: "
+ self.getErrorMessage(data["error_code"])
+ " Response:"
+ json.dumps(data)
)
def getMediaSession(self):
return HttpMediaSession(self.host, self.cloudPassword) # pragma: no cover
def getOsd(self):
return self.performRequest(
{
"method": "get",
"OSD": {"name": ["date", "week", "font"], "table": ["label_info"]},
}
)
def setOsd(
self,
label,
dateEnabled=True,
labelEnabled=False,
weekEnabled=False,
dateX=0,
dateY=0,
labelX=0,
labelY=500,
weekX=0,
weekY=0,
):
data = {
"method": "set",
"OSD": {
"date": {
"enabled": "on" if dateEnabled else "off",
"x_coor": dateX,
"y_coor": dateY,
},
"week": {
"enabled": "on" if weekEnabled else "off",
"x_coor": weekX,
"y_coor": weekY,
},
"font": {
"color": "white",
"color_type": "auto",
"display": "ntnb",
"size": "auto",
},
"label_info_1": {
"enabled": "on" if labelEnabled else "off",
"x_coor": labelX,
"y_coor": labelY,
},
},
}
if len(label) >= 16:
raise Exception("Error: Label cannot be longer than 16 characters")
elif len(label) == 0:
data["OSD"]["label_info_1"]["enabled"] = "off"
else:
data["OSD"]["label_info_1"]["text"] = label
if (
dateX > 10000
or dateX < 0
or labelX > 10000
or labelX < 0
or weekX > 10000
or weekX < 0
or dateY > 10000
or dateY < 0
or labelY > 10000
or labelY < 0
or weekY > 10000
or weekY < 0
):
raise Exception("Error: Incorrect corrdinates, must be between 0 and 10000")
return self.performRequest(data)
def getModuleSpec(self):
return self.performRequest(
{"method": "get", "function": {"name": ["module_spec"]}}
)
def getPrivacyMode(self):
data = {"method": "get", "lens_mask": {"name": ["lens_mask_info"]}}
return self.performRequest(data)["lens_mask"]["lens_mask_info"]
def getMotionDetection(self):
data = {"method": "get", "motion_detection": {"name": ["motion_det"]}}
return self.performRequest(data)["motion_detection"]["motion_det"]
def getAlarm(self):
data = {"method": "get", "msg_alarm": {"name": ["chn1_msg_alarm_info"]}}
return self.performRequest(data)["msg_alarm"]["chn1_msg_alarm_info"]
def getLED(self):
data = {"method": "get", "led": {"name": ["config"]}}
return self.performRequest(data)["led"]["config"]
def getAutoTrackTarget(self):
data = {"method": "get", "target_track": {"name": ["target_track_info"]}}
return self.performRequest(data)["target_track"]["target_track_info"]
def getAudioSpec(self):
return self.performRequest(
{
"method": "get",
"audio_capability": {"name": ["device_speaker", "device_microphone"]},
}
)
def getVhttpd(self):
return self.performRequest({"method": "get", "cet": {"name": ["vhttpd"]}})
def getBasicInfo(self):
return self.performRequest(
{"method": "get", "device_info": {"name": ["basic_info"]}}
)
def getTime(self):
return self.performRequest(
{"method": "get", "system": {"name": ["clock_status"]}}
)
def getMotorCapability(self):
return self.performRequest({"method": "get", "motor": {"name": ["capability"]}})
def setPrivacyMode(self, enabled):
return self.performRequest(
{
"method": "set",
"lens_mask": {
"lens_mask_info": {"enabled": "on" if enabled else "off"}
},
}
)
def setAlarm(self, enabled, soundEnabled=True, lightEnabled=True):
alarm_mode = []
if not soundEnabled and not lightEnabled:
raise Exception("You need to use at least sound or light for alarm")
if soundEnabled:
alarm_mode.append("sound")
if lightEnabled:
alarm_mode.append("light")
data = {
"method": "set",
"msg_alarm": {
"chn1_msg_alarm_info": {
"alarm_type": "0",
"enabled": "on" if enabled else "off",
"light_type": "0",
"alarm_mode": alarm_mode,
}
},
}
return self.performRequest(data)
def moveMotor(self, x, y):
return self.performRequest(
{"method": "do", "motor": {"move": {"x_coord": str(x), "y_coord": str(y)}}}
)
def moveMotorStep(self, angle):
if not (0 <= angle < 360):
raise Exception("Angle must be in a range 0 <= angle < 360")
return self.performRequest(
{"method": "do", "motor": {"movestep": {"direction": str(angle)}}}
)
def calibrateMotor(self):
return self.performRequest({"method": "do", "motor": {"manual_cali": ""}})
def format(self):
return self.performRequest(
{"method": "do", "harddisk_manage": {"format_hd": "1"}}
) # pragma: no cover
def setLEDEnabled(self, enabled):
return self.performRequest(
{
"method": "set",
"led": {"config": {"enabled": "on" if enabled else "off"}},
}
)
def setDayNightMode(self, inf_type):
if inf_type not in ["off", "on", "auto"]:
raise Exception("Invalid inf_type, can be off, on or auto")
return self.performRequest(
{"method": "set", "image": {"common": {"inf_type": inf_type}}}
)
def getUserID(self):
if not self.userID:
self.userID = self.performRequest(
{
"method": "multipleRequest",
"params": {
"requests": [
{
"method": "getUserID",
"params": {"system": {"get_user_id": "null"}},
}
]
},
}
)["result"]["responses"][0]["result"]["user_id"]
return self.userID
def getRecordings(self, date):
return self.performRequest(
{
"method": "multipleRequest",
"params": {
"requests": [
{
"method": "searchVideoOfDay",
"params": {
"playback": {
"search_video_utility": {
"channel": 0,
"date": date,
"end_index": 99,
"id": self.getUserID(),
"start_index": 0,
}
}
},
}
]
},
}
)["result"]["responses"][0]["result"]["playback"]["search_video_results"]
def getCommonImage(self):
return self.performRequest({"method": "get", "image": {"name": "common"}})
def setMotionDetection(self, enabled, sensitivity=False):
data = {
"method": "set",
"motion_detection": {"motion_det": {"enabled": "on" if enabled else "off"}},
}
if sensitivity:
if sensitivity == "high":
data["motion_detection"]["motion_det"]["digital_sensitivity"] = "80"
elif sensitivity == "normal":
data["motion_detection"]["motion_det"]["digital_sensitivity"] = "50"
elif sensitivity == "low":
data["motion_detection"]["motion_det"]["digital_sensitivity"] = "20"
else:
raise Exception("Invalid sensitivity, can be low, normal or high")
return self.performRequest(data)
def setAutoTrackTarget(self, enabled):
return self.performRequest(
{
"method": "set",
"target_track": {
"target_track_info": {"enabled": "on" if enabled else "off"}
},
}
)
def reboot(self):
return self.performRequest({"method": "do", "system": {"reboot": "null"}})
def getPresets(self):
data = self.performRequest({"method": "get", "preset": {"name": ["preset"]}})
self.presets = {
id: data["preset"]["preset"]["name"][key]
for key, id in enumerate(data["preset"]["preset"]["id"])
}
return self.presets
def savePreset(self, name):
self.performRequest(
{
"method": "do",
"preset": {"set_preset": {"name": str(name), "save_ptz": "1"}},
}
)
self.getPresets()
return True
def deletePreset(self, presetID):
if not str(presetID) in self.presets:
raise Exception("Preset " + str(presetID) + " is not set in the app")
self.performRequest(
{"method": "do", "preset": {"remove_preset": {"id": [presetID]}}}
)
self.getPresets()
return True
def setPreset(self, presetID):
if not str(presetID) in self.presets:
raise Exception("Preset " + str(presetID) + " is not set in the app")
return self.performRequest(
{"method": "do", "preset": {"goto_preset": {"id": str(presetID)}}}
)
def getLensDistortionCorrection(self):
data = self.performRequest({"method": "get", "image": {"name": ["switch"]}})
return data["image"]["switch"]["ldc"] == "on"
def setLensDistortionCorrection(self, enable):
return self.performRequest(
{"method": "set", "image": {"switch": {"ldc": "on" if enable else "off"}}}
)
def getImageFlipVertical(self):
data = self.performRequest({"method": "get", "image": {"name": ["switch"]}})
return data["image"]["switch"]["flip_type"] == "center"
def setImageFlipVertical(self, enable):
return self.performRequest(
{
"method": "set",
"image": {"switch": {"flip_type": "center" if enable else "off"}},
}
)
def setLightFrequencyMode(self, mode):
allowed_modes = ["auto", "50", "60"]
if mode not in allowed_modes:
raise Exception(
"Light frequency mode must be one of {}".format(allowed_modes)
)
return self.performRequest(
{"method": "set", "image": {"common": {"light_freq_mode": mode}}}
)
@staticmethod
def getErrorMessage(errorCode):
if str(errorCode) in ERROR_CODES:
return str(ERROR_CODES[str(errorCode)])
else:
return str(errorCode)
def setPreset(self, presetID):
if not str(presetID) in self.presets:
raise Exception("Preset " + str(presetID) + " is not set in the app")
return self.performRequest(
{"method": "do", "preset": {"goto_preset": {"id": str(presetID)}}}
)
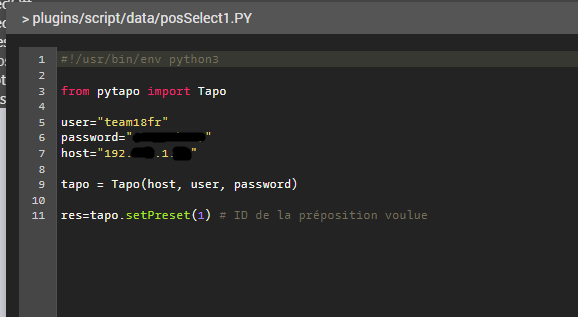
J’aimerais vraiment arriver à comprendre comment interagir avec cette librairie, j’ai vu beaucoup de choses qui serait bien utile comme le reboot