Bonjour à tous. Je vais ici partager ma création pour activer/désactiver mon alarme Homiris (EPS) via un « robot » conçu maison  La suite arrive dans la soirée
La suite arrive dans la soirée
1 « J'aime »
IDEE
L’idée originale est de créer une boîte dans laquelle j’ai deux actionneurs qui appuient sur les boutons de la télécommande. Il me faut les alimenter avec une alimentation dédiée, et je souhaite envoyer le 220 V via des modules Evology (j’en ai déjà à la maison) fonctionnant en EnOcean, qui permettent de faire un pilotage de type « Gâche électrique », parfaitement adaptés à un appui de 2 secondes sur les boutons.
J’ai des compétences en conception et je compte créer la boîte avec SolidWorks dont j’ai une licence, et l’envoyer en impression 3D.
Il n’y a plus qu’à trouver le matériel
MATERIEL
J’ai pas mal cherché, et mon choix s’est dirigé sur des électroaimants de type « Pousser ».
J’ai mesuré à l’aide d’une balance et un pic à escargots avec une boule de diamètre 12mm, l’effort nécessaire pour appuyer avec la boule sur les boutons de ma télécommande. Il est de l’ordre de 500g, soit environ 5N.
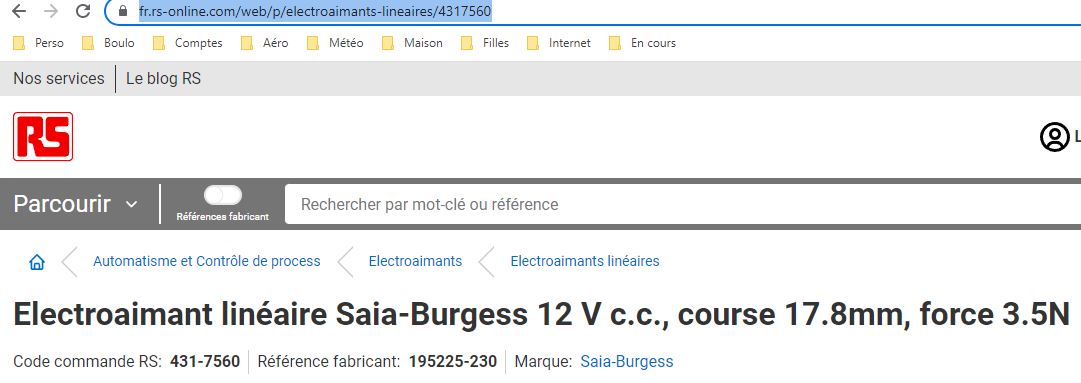
J’ai trouvé des électroaimants sur le site RS-ONLINE, (électroaimants linéaires, filtrer « Actionnement » en type « Pousser »): Modèle. Je voulais qu’ils soient facilement fixables dans ma boite, j’ai donc opté pour les électroaimants cylindriques avec un écrou comme celui-là:

J’ai alors choisi le moins cher parmi tous ceux qui sont de cette forme, ici.
Référence: 195225-230
Marque: Saia-Burgess
Tarif: 44€40 TTC - Il en faut 2
J’ai mis du temps à comprendre la documentation des électroaimants, mais j’ai fini par y arriver. En voici un extrait:
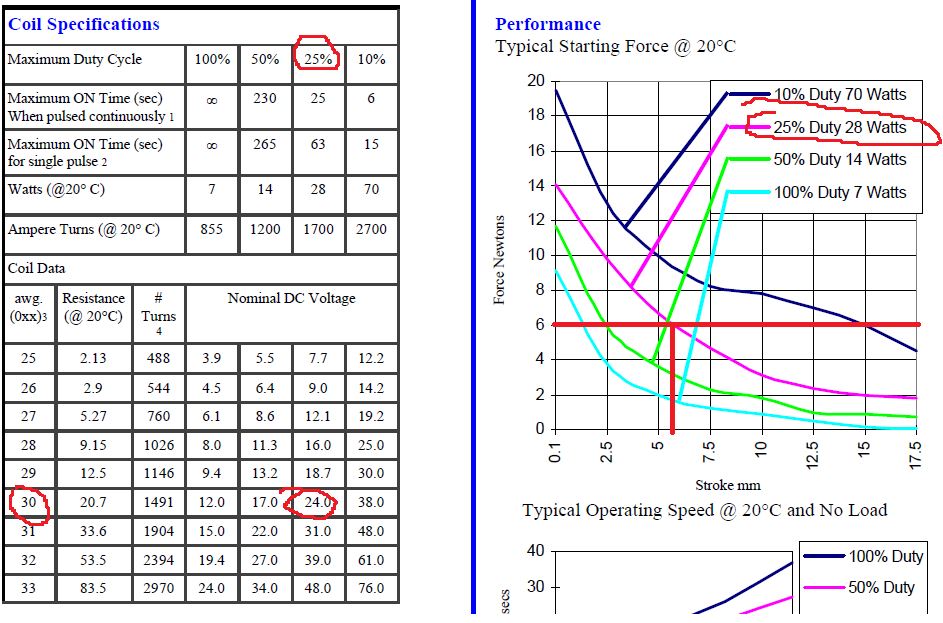
A savoir, le tableau du bas est imposé par l’électroaimant choisi, dans mon cas de résistance 20.7 ohms, ligne avec awg=30. En effet, c’est le seul proposant des alimentations classiques 12 et 24V.
Je veux un effort de l’ordre de 600g (6N), pour une course pas trop courte (environ 5mm). Le même aimant, utilisé à 12V peut fonctionner 100% du temps avec un effort qui dépend de la course (courbe 100%), mais à 24V, il ne doit fonctionner que 25% du temps (soit par exemple toutes les 4 minutes, peut fonctionner 25s (max documentation) puis 75s en pause pour se refroidir - Le temps est défini par le constructeur) mais délivre ainsi un effort plus important (courbe 25%). Je choisis de l’alimenter en 24V, ce qui me permettra d’avoir un effort de l’ordre de 6N à une course vers 5mm. Je pourrai si besoin augmenter l’effort jusqu’à 14N et le diminuer proche de 0N, il suffira de choisir la distance entre la tige et ma télécommande.
A 24V, on lit que la puissance de l’aimant est de 28 W.
J’ai choisi une alimentation 24V max 30W en ligne ici:

Tarif: 22€ TTC - Il en faut 2
Mise à jour 2024: nouvelle alim équivalente semblant avoir remplacé la mienne (LIEN)
Mise à jour 2025: Cette alimentation fonctionne aussi: AGOTD Transformateur LED 230 V vers LED 24 V CC 30 W - Bloc d'alimentation LED Driver - Tension constante 30 W pour bandes lumineuses LED, lampes d'armoire : Amazon.fr: Luminaires et Éclairage
Les dimensions max pour tenir dans ma boîte sont: 165x51x16 mm
J’ai enfin acheté mes modules multifonction Evology ici:

Tarif: 34.90 TTC - Il en faut 2
Oui, cela fait un petit budget… Sans les frais de port, il y a donc 202€60
Mise à jour 2024: il faudra à priori prendre des modules Lexman qui remplacent les Evology, en Zigbee: LIEN
Mise à jour 2025: en Zigbee NodOn SIN-4-1-20 Module multifonction 100% interopérable Zigbee, Blanc : Amazon.fr: Bricolage
Les dimensions max pour tenir dans ma boîte sont: 40x44x17 mm
CONCEPTION DE LA BOITE
Me voilà parti dans la conception de la boîte avec SolidWorks.
Je vous épargne le plan fait à la main, les dimensions choisies etc, c’est un gros boulot mais je sais faire, je ne vous fait part que du résultat.
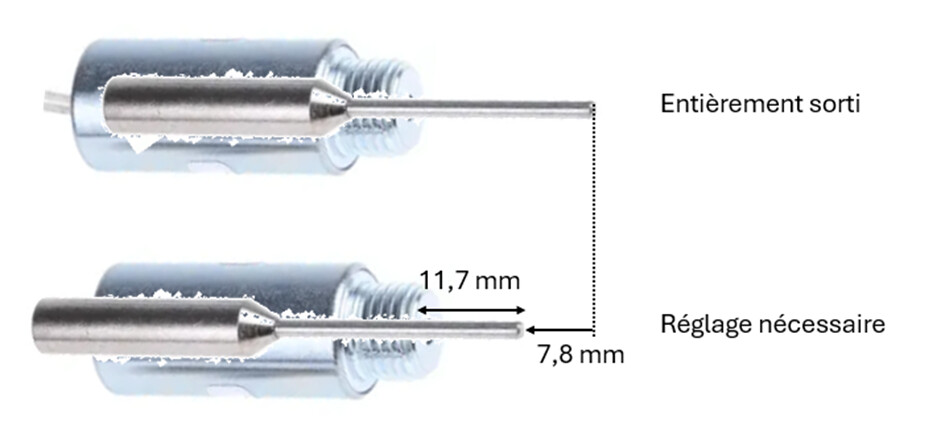
Le plus dur pour moi a été de savoir comment était mesurée la « course » des courbes d’effort, personne ne nous dit où est le 0 mm de course… Le but étant évidemment que quand les boules reposent sur les boutons, on soit à 5 mm de course pour avoir 6N d’effort. J’ai utilisé le titre suivant:
J’en ai déduit que lorsque la tige est entièrement sortie, la course est de 17.8 mm, et j’ai donc ensuite fait en sorte de créer ma boite pour que la tige soit reculée de 12.8 mm depuis sa position entièrement sortie, correspondant à une course de 5mm. MAIS… Lorsque j’ai fait mon montage définitif, j’ai pu voir que les aimants n’appuyaient pas assez fort sur les touches de la télécommande. Alors, j’ai mis des rondelles entre mes deux demi boîtes afin de les éloigner de 5mm, ce qui a permis d’augmenter l’effort, et maintenant cela fonctionne. DONC… Je ne sais pas où est le 0 de la course, mais après une itération, je sais maintenant qu’il faut que la tige de l’électroaimant sorte de 11.7 mm du bout de la partie fixe pour avoir un effort suffisant pour appuyer sur les touches. Ou encore, depuis la position entièrement sortie, il faut rentrer la tige de 7.8mm et non de 12.8.
J’ai donc fait une mise à jour de la boite, que je ne re commanderai malheureusement pas vu son prix, mais comme ça, si vous la commandez, vous aurez la boite à jour ![]() J’ai ajouté quelques modifications dont je ne parlerai pas mais qui la rendent encore mieux que celle que j’ai.
J’ai ajouté quelques modifications dont je ne parlerai pas mais qui la rendent encore mieux que celle que j’ai.
Mise à jour 03/2025: Je pense que la course nulle est lorsque la tige est entièrement sortie. J’ai d’ailleurs pu valider que lorsque j’éloigne la tige des boutons, l’effort diminue, et qu’il est maximum quand la tige est en bas en butée. Du coup, je refais une mise à jour de la boîte pour garantir 5 mm de course « restante ». Autrement dit, il faut rentrer la tige de 5 mm et non de 7.8. Dans mon nouveau modèle, j’ai fait en sorte qu’elle soit rentrée de 5 mm pour être sur d’avoir un effort assez grand. Sur l’image ci-dessus, il faut donc lire 14.5 mm de tige sortie et 5 mm de recul par rapport à la position entièrement sortie.
Attention: l’impression 3D permet d’obtenir des pièces dont la précision est de qq centaines de microns, donc d’une boîte à l’autre, il peut y avoir des petits ajustements.
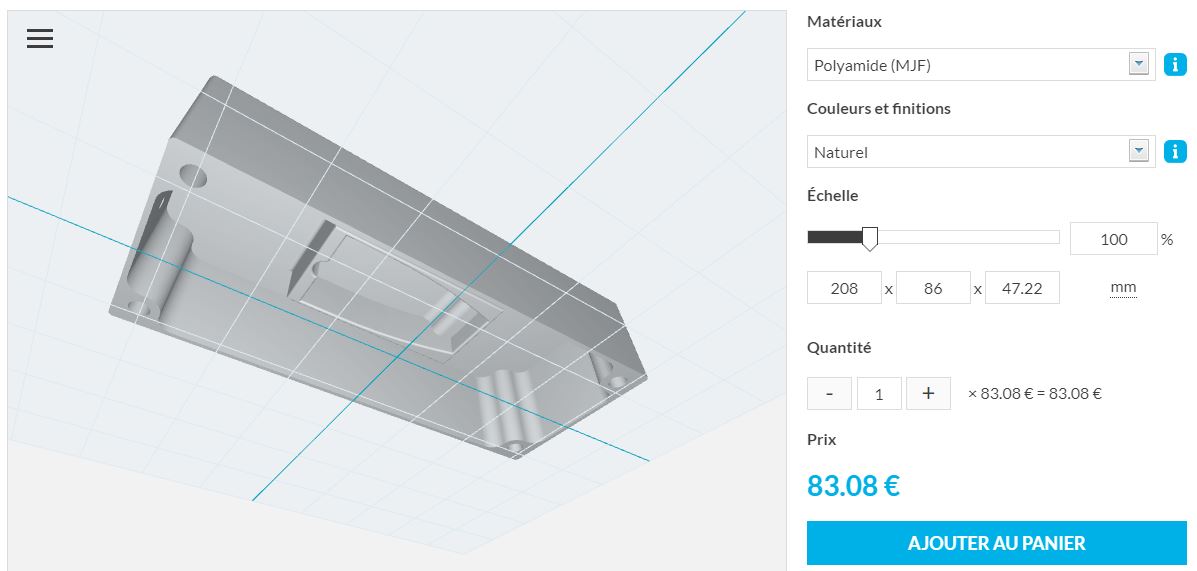
Alors, déjà, voici des captures d’écran du modèle 3D à jour:
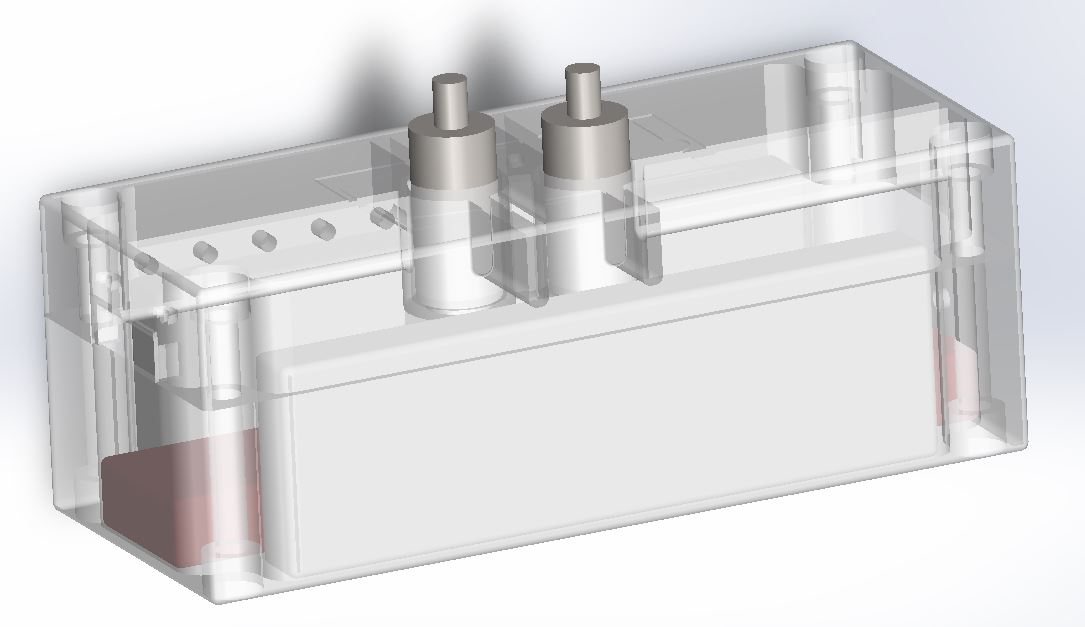
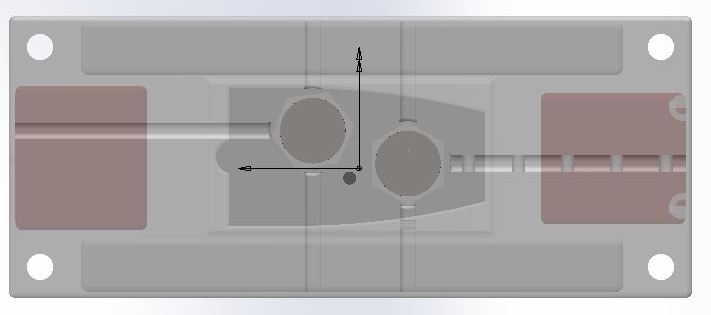
On notera quelques détails:
- En rouge, les modules Evology aux bonnes dimensions
- En gris, les deux alimentations aux bonnes dimensions
- La fixation par 4 vis
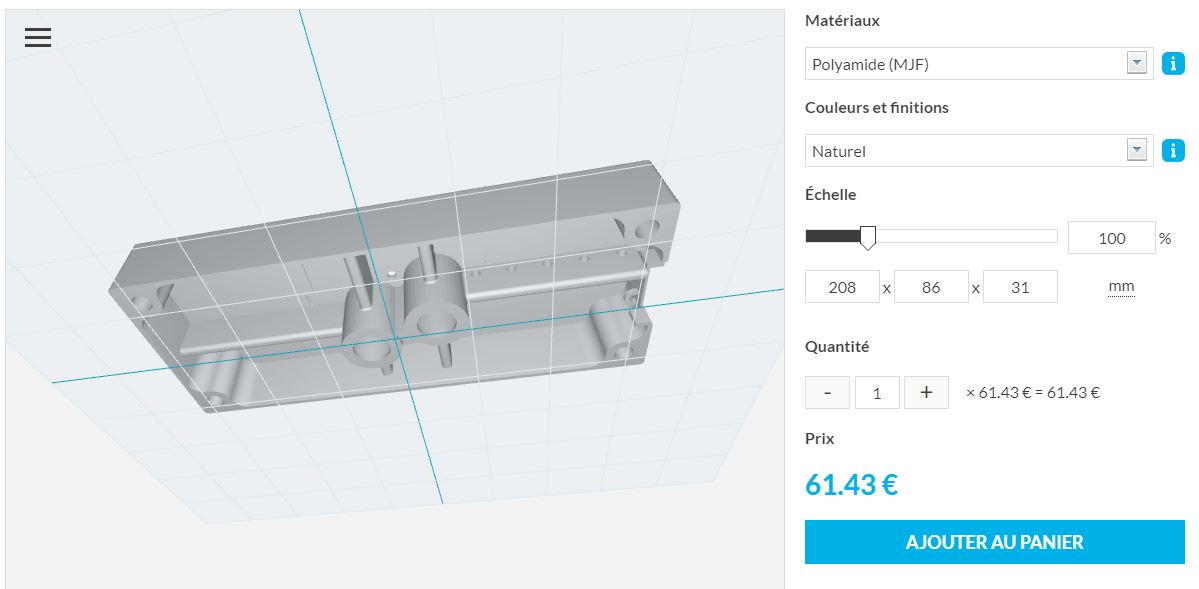
Les deux demi boîtes:
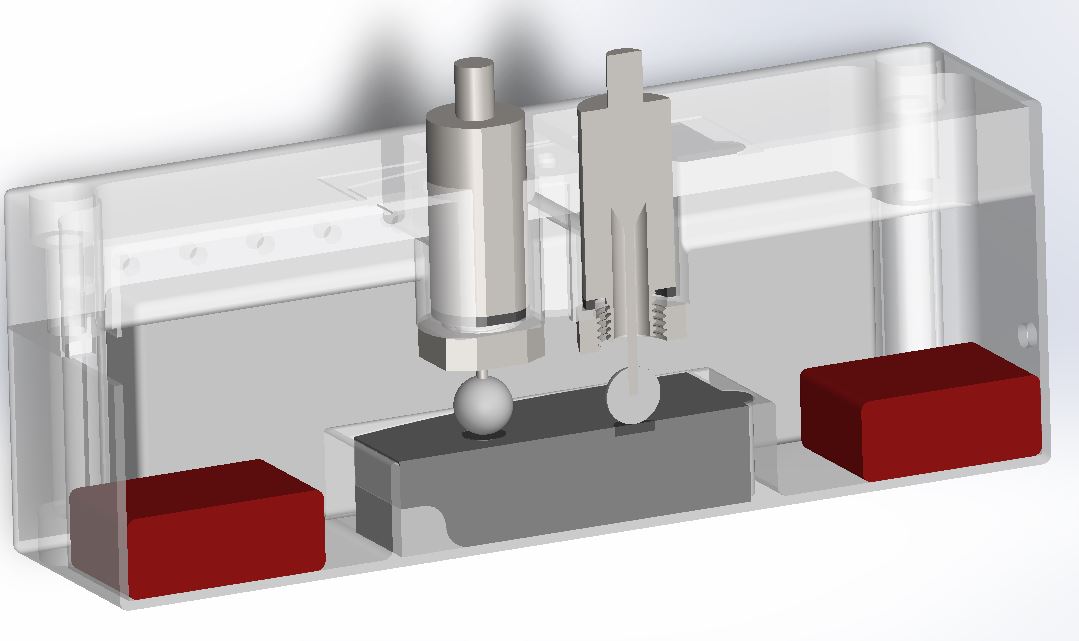
Et une vue en coupe:
Et les deux demi boîtes:
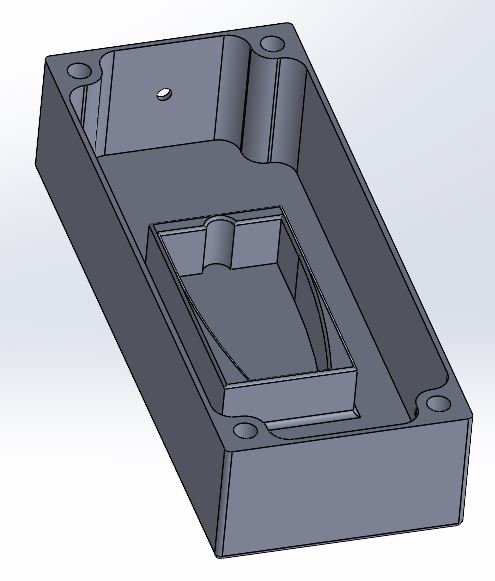
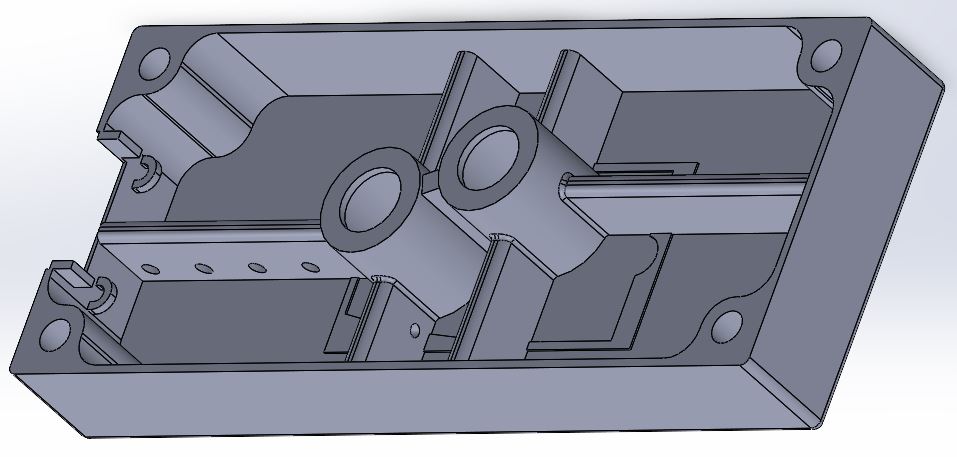
- Des trous prévus pour faire passer les fils
- Quelques détails permettant de guider les fils
- Une fenêtre pour voir dans la boite
- Des renforts (étude d’efforts après)
- La présence d’un joint de 2mm d’épaisseur prévu entre l’aimant et la demi boîte supérieure
J’ai prévu une épaisseur de plastique de 2mm pour mes demi boîtes. J’ai donc préféré vérifier que cette épaisseur sous un effort de deux fois 15N (si les deux aimants sont actionnés en même temps avec un effort presque max) n’allaient pas conduire la boîte à trop se déformer ou rompre, j’ai donc mené une étude de contraintes dont voici les résultats sur le premier modèle de boîte:
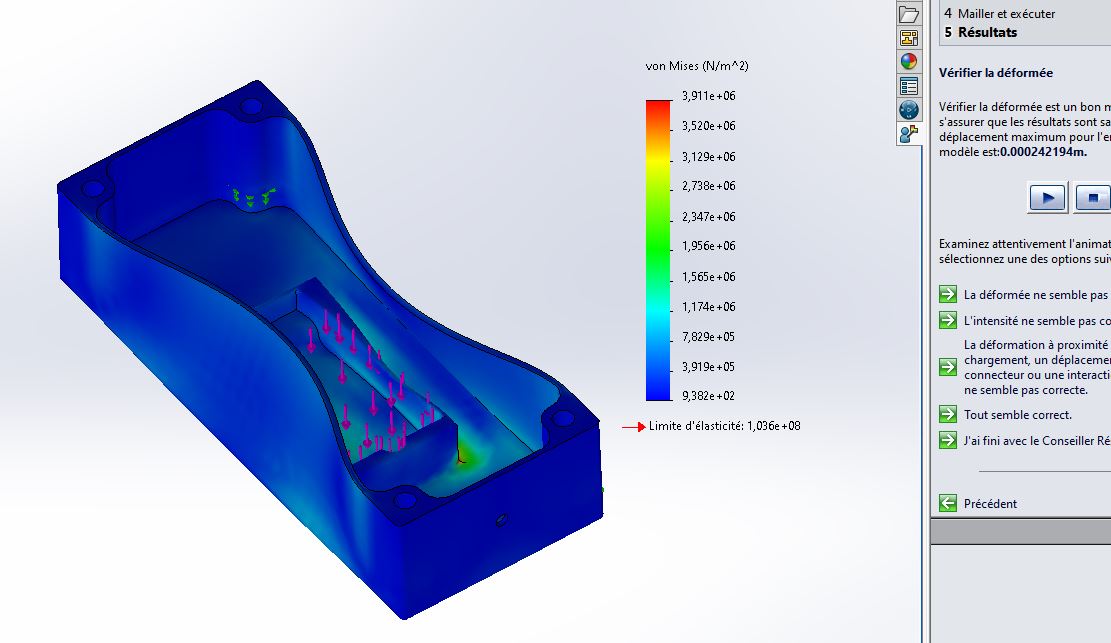
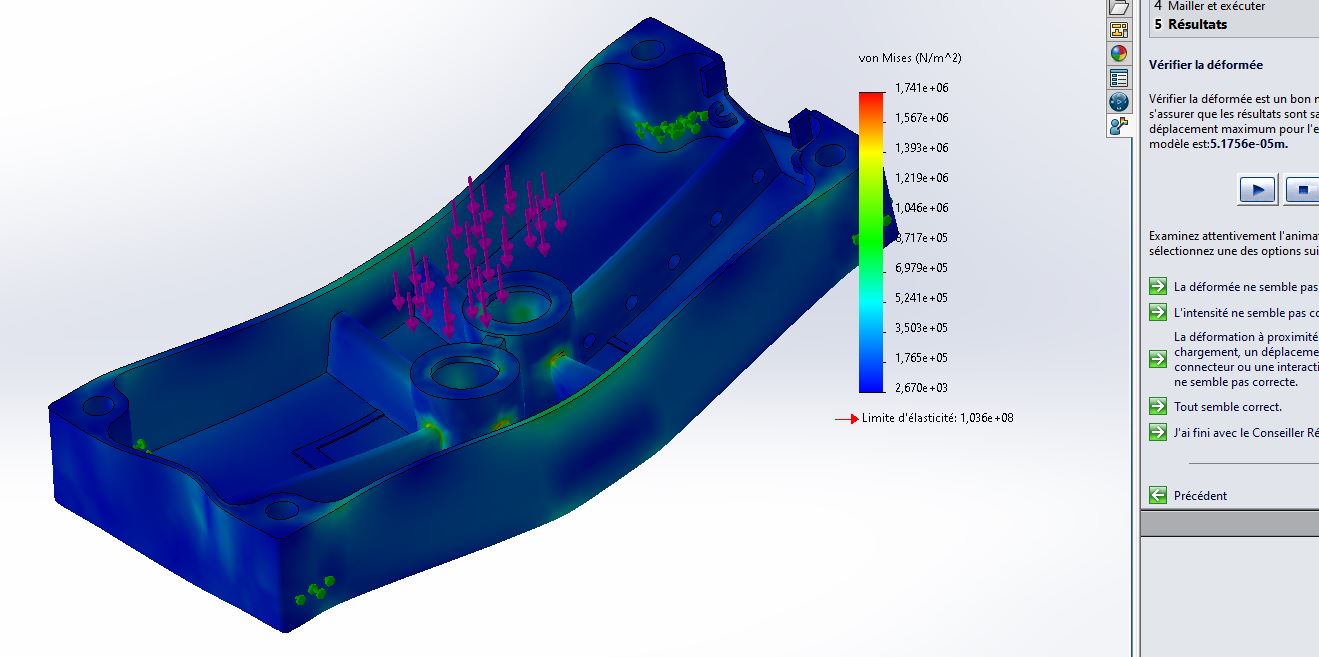
Dans les deux cas, les déformations sont négligeables (moins de 200 microns) et les contraintes maximales de l’ordre de quelques MPa (moins de 4 MPa) pour des plastiques qui supportent (malgré l’incertitude de l’influence du procédé utilisé) de l’ordre de 60 à 100 Mpa pour du Polyamide.
Les vis doivent avoir les dimensions suivantes :
- Longueur non accessible 56.22 mm
- Longueur max 76.22
- Diamètre filet 8 mm
- Diamètre trous pour tête de vis et écrou 14
- Idéalement, prendre des vis diamètre 6 * 70 mm de tête max diamètre 14 et des écrous de diamètre max 14 extérieur (Exemple Amazon)
Dimensions de la boîte:
- Longueur: 208 mm
- Largeur: 84 mm
- Hauteur: 76.22 (pilote la course)
- Epaisseurs en général: 2 mm
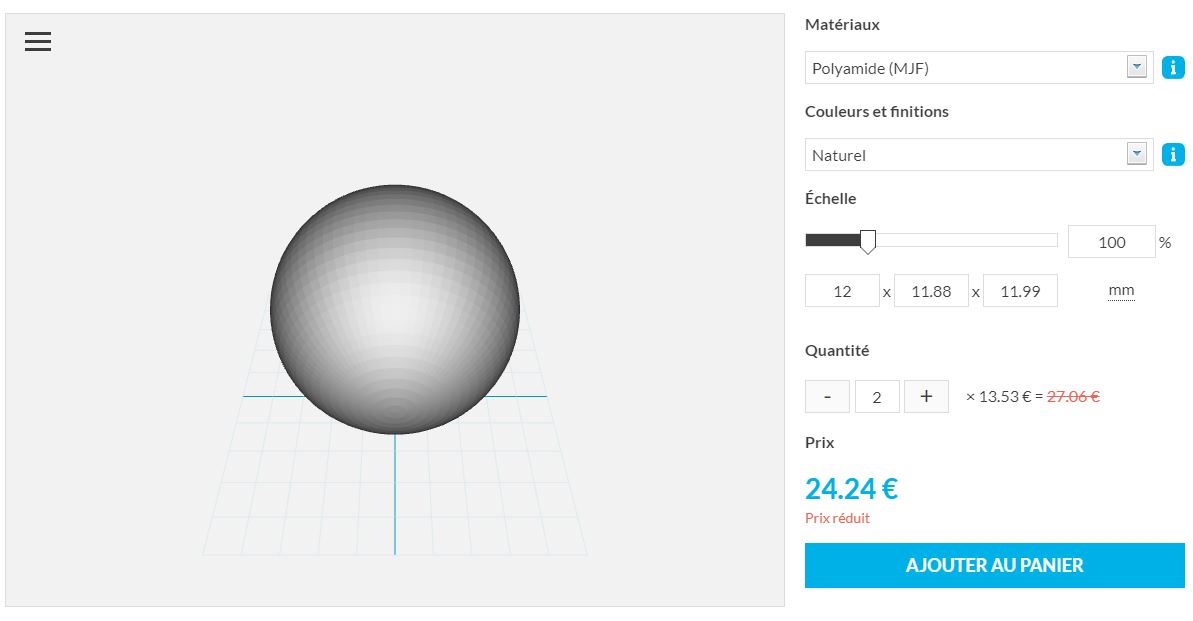
J’oubliais, j’ai fait imprimer deux petites sphères de diamètre extérieur 12 mm avec un trou de profondeur 6mm et diamètre 2.39mm qui permet d’enfiler les tiges des aimants dedans:
Je vous joint GRATUITEMENT les 3 modèles au format STL:
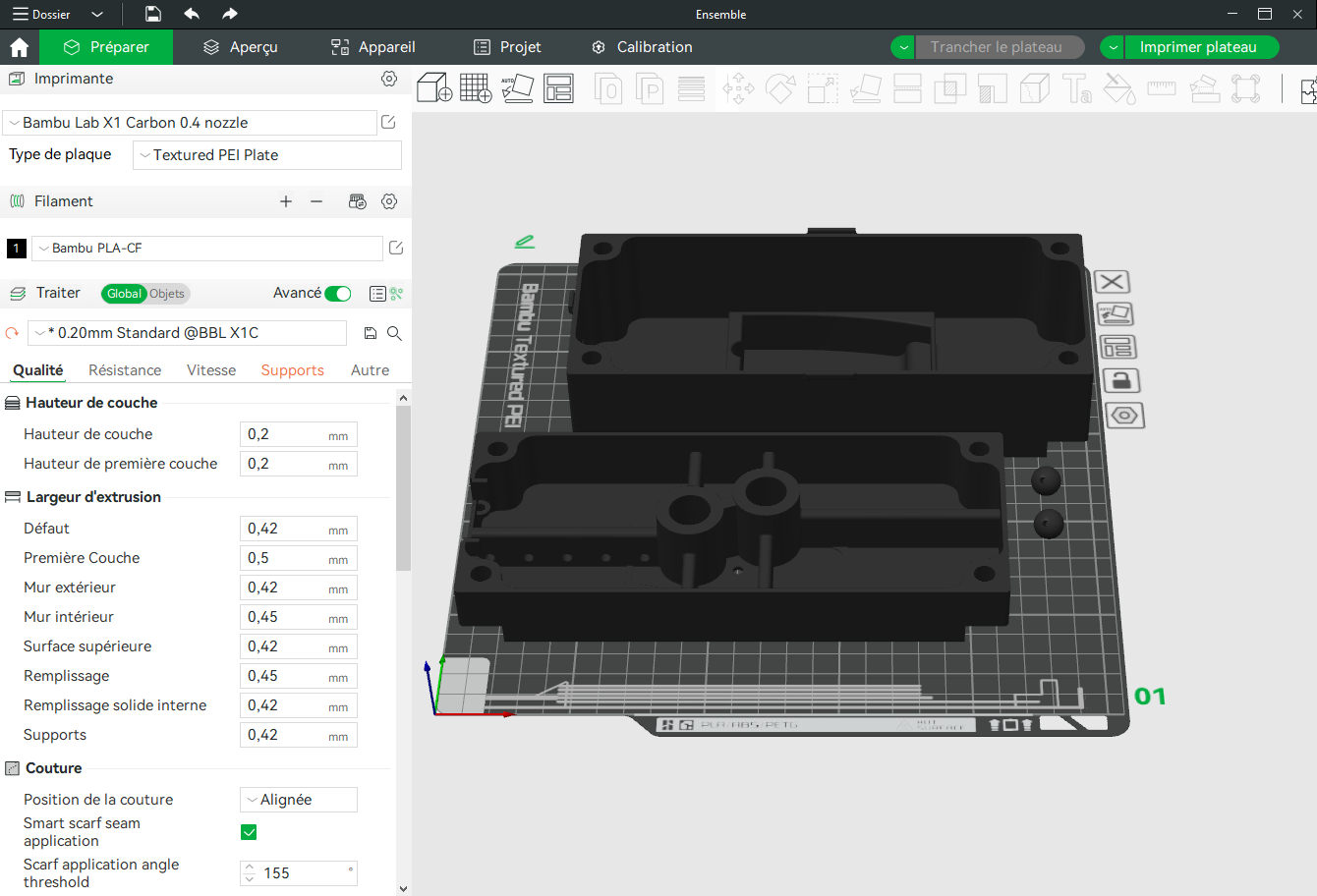
Mise à jour 2025: Ayant une imprimante 3D Bambulab X1C, je vous partage les fichiers 3mf dont le plateau complet ici (lien):
Et je vous partage l’ensemble des fichiers 3D ici dans une archive: LIEN
Il est à noter que les fichiers partagés correspondent à une version de la boîte améliorée (c’est précisé dans la suite de cet article).
IMPRESSION 3D
Je passe toujours par le site imaterialise ici. C’est le site proposé sur Windows par Paint3D. J’en suis très satisfait, en particulier les procédés autre que le dépôt de fil donnent des résultats très satisfaisants quand il s’agit de réaliser de la fabrication directe (et non du prototypage). Si cela vous intéresse, ma thèse ![]() LIEN
LIEN
Avant, je commandais mes pièces en SLS (fusion laser) mais depuis peu, un procédé un peu moins cher est proposé (MJF Multi Jet Fusion) et voici une vidéo d’explications si besoin.
Voici ce que j’ai commandé:
Oui, le budget est là aussi conséquent, j’avais la pression avec le premier jet, et je suis content que cela fonctionne, même si je n’ai pas la dernière version de ma boîte, et vous savez maintenant pourquoi ![]()
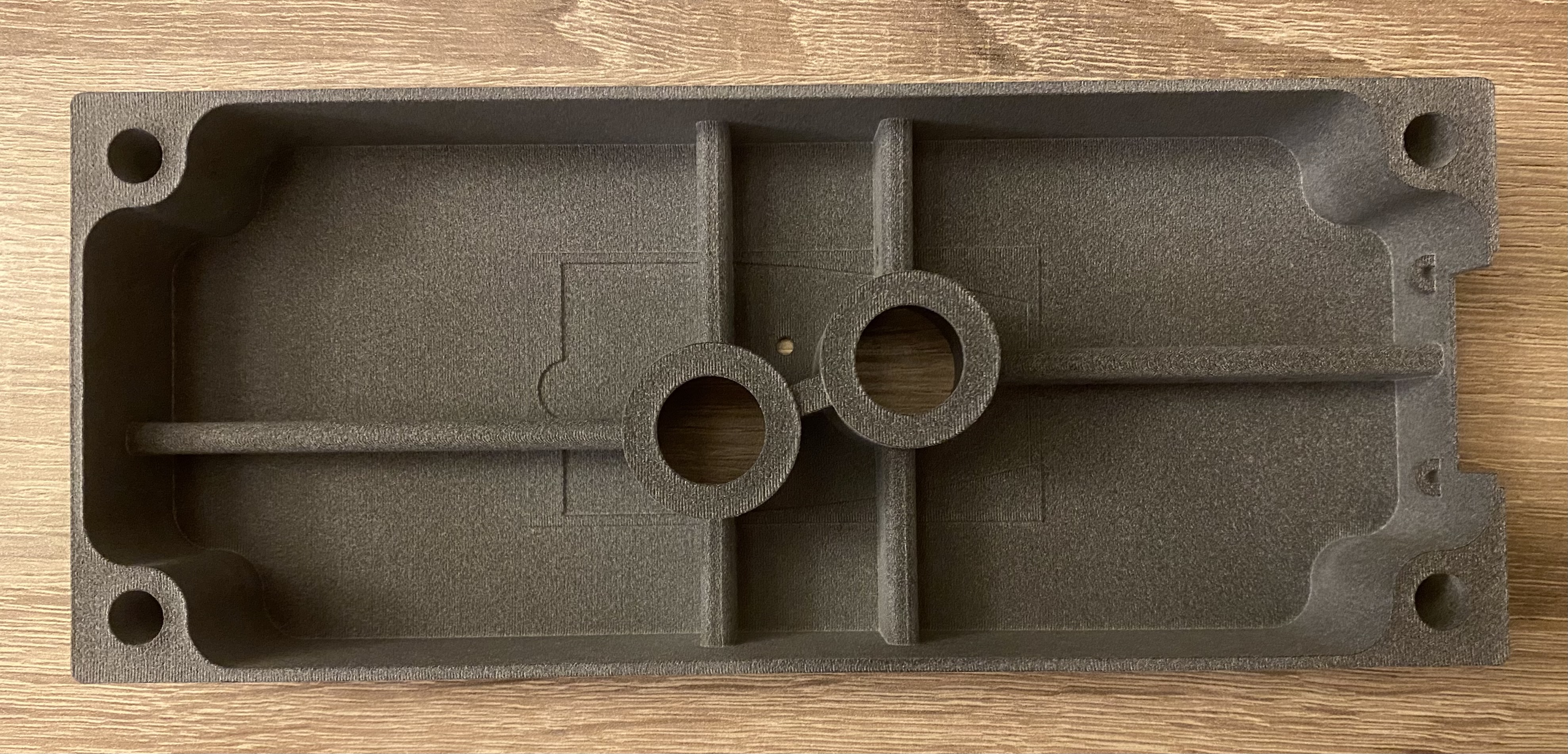
RECEPTION
Voici quelques photos de la boîte reçue ![]()
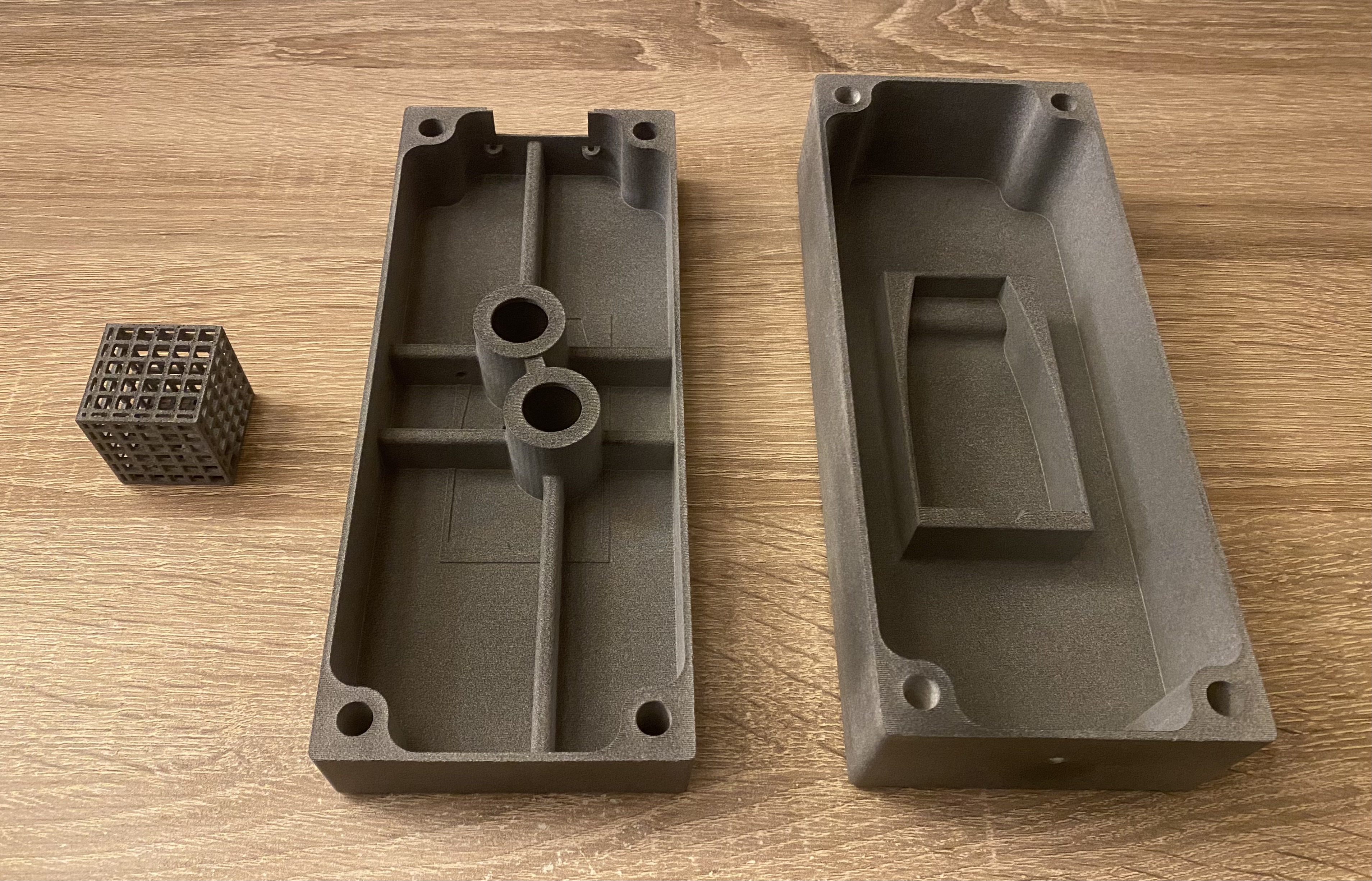
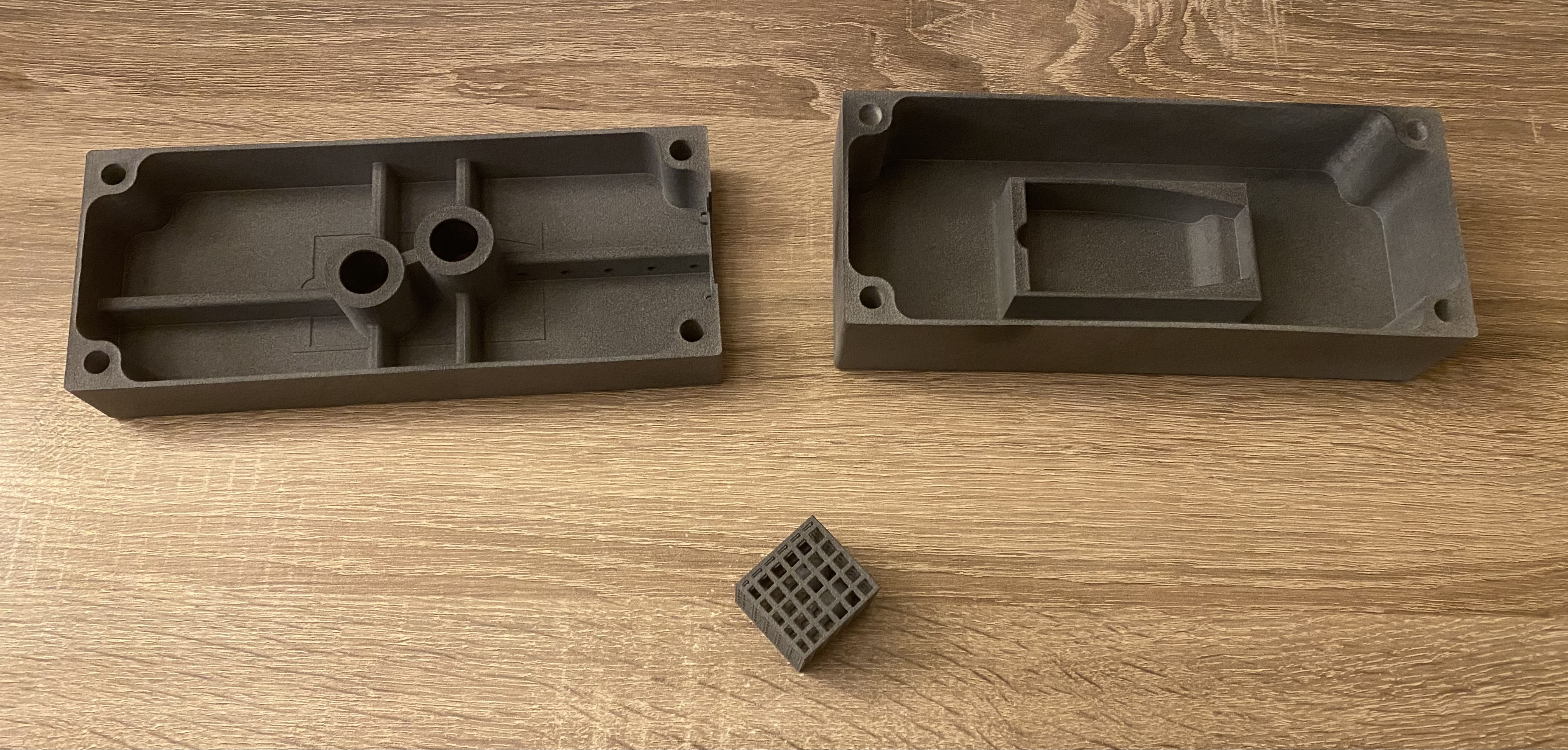

Les deux petites boules sont arrivées dans une cage ![]()
Rappel: version d’avant
SCHEMA ELECTRIQUE
Un petit dessin pour préciser le montage électrique réalisé:
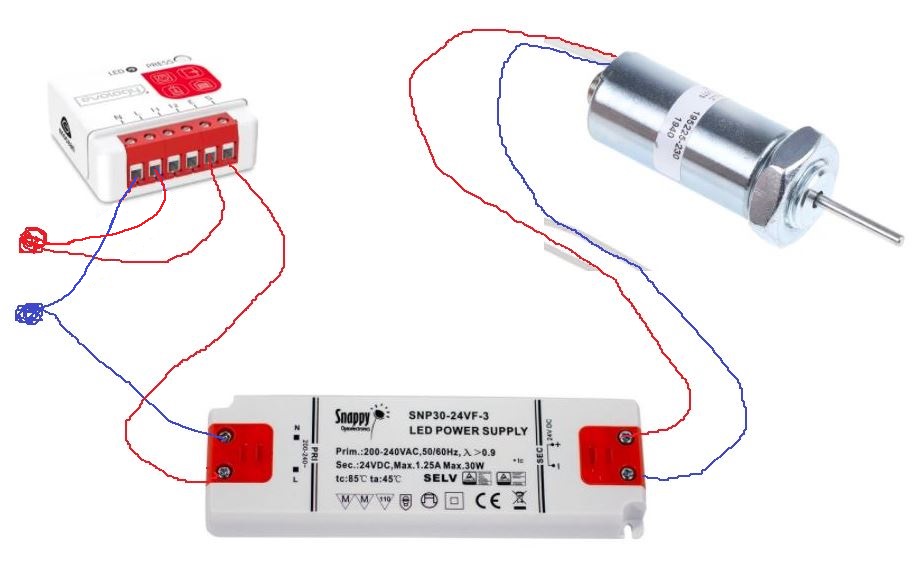
Il semble qu’il n’y ait pas d’importance au sens d’alimentation en 24V des aimants (j’ai branché sans réfléchir les 2 et les deux ont bien fonctionné du premier coup).
MONTAGE
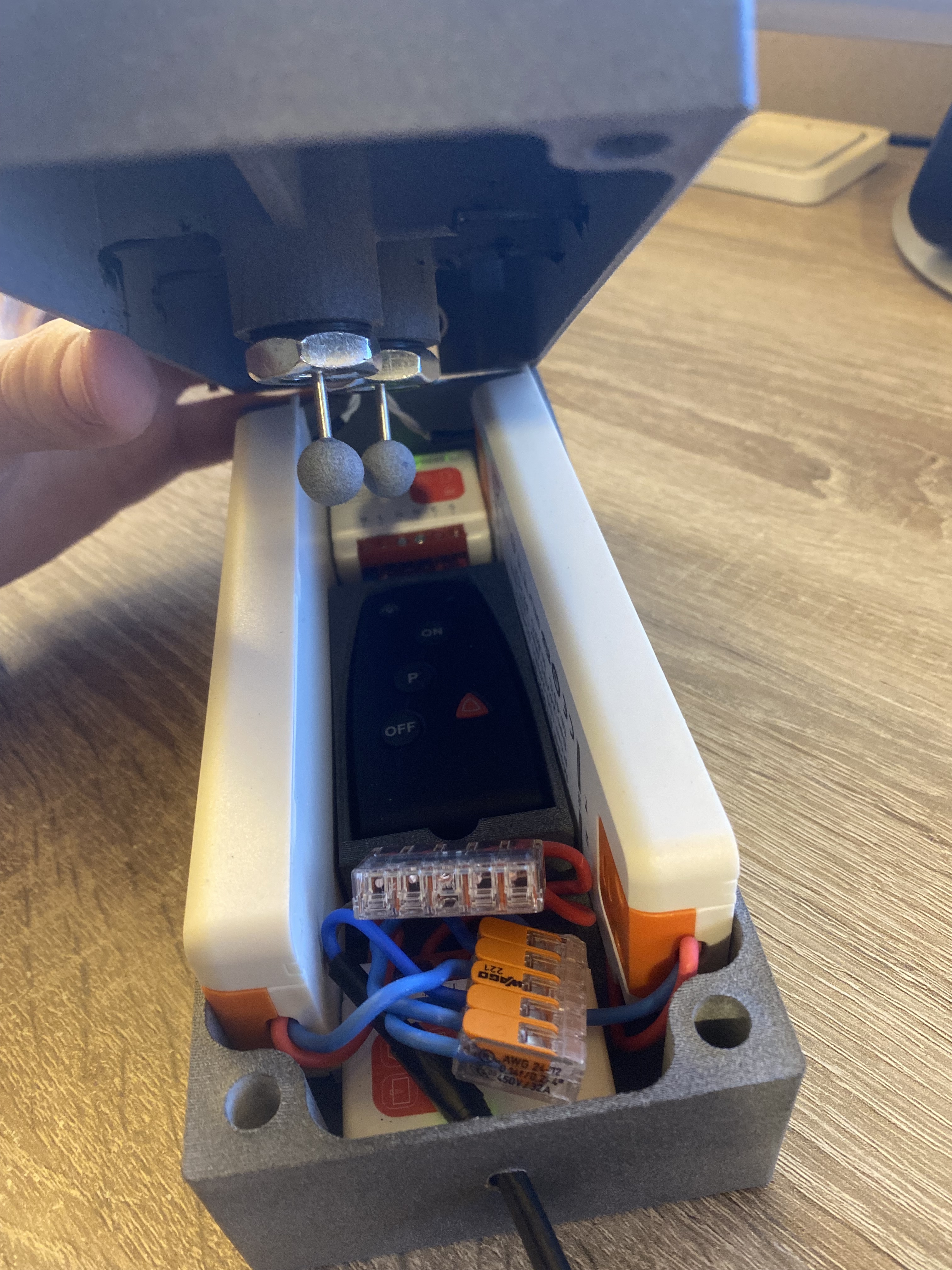
Voici quelques photos du montage:


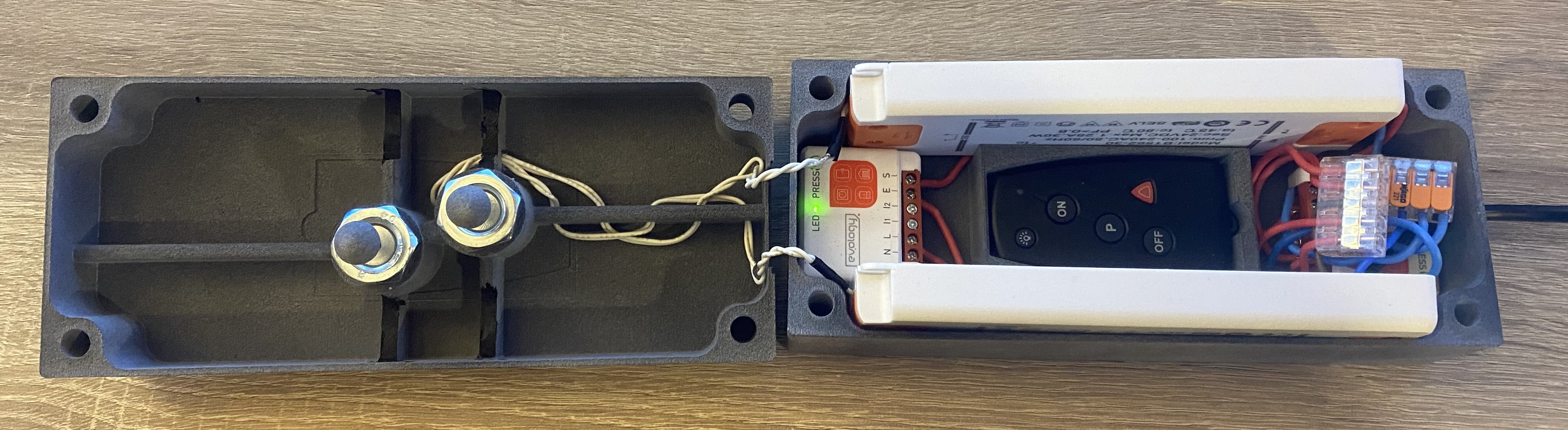



Remarques:
- J’ai mis un fil électrique noir pour alimenter la boîte, et pour qu’il ne suisse sortir en arrière, j’ai ensuite enroulé du scotch électrique noir en for de de cône et tiré à l’envers pour le bloquer
- Je n’avais pas prévu le passage des fils sous les alimentations, il m’a fallu réduire comme j’ai pu les renforts de la partie supérieure de la boîte (on le voit sur les photos)
- Comme abordé eu début de cet article, l’effort était trop faible sur les touches, j’ai ajouté donc 5mm de course avec 5 rondelles entre les deux boîtes - J’ai mis à jour le modèle en ajoutant 5mm dans la boîte du bas, de fait les renforts permettent alors de laisser passer des fils sous les alimentations, j’ai augmenté la longueur des renforts de 3mm, ce qui laisse 2mm pour des fils. Ainsi, avec la nouvelle boîte, ça sera bien fermé, alors que pour ma part, j’ai 5mm de trou entre les 2 boîtes.
- Selon les vis choisies pour fermer la boîte, il peut être difficile de faire passer des outils. J’ai donc mis à jour le modèle afin de pouvoir passer des outils sans problèmes.
- Rien n’était prévu pour la mise en position des deux parties de la boîte, mais cela fonctionne bien. J’ai toutefois mis à jour le modèle en ajoutant 3 surfaces pour la mise en position.
- J’ai mis un point de super glue au bout de chaque aimant pour fixer les boules, le trou issu de l’impression 3D permet l’entrée parfaite de la tige de l’aimant jusqu’au fond du trou
- J’ai mis un joint 15-21 (un peu trop petit en diamètre intérieur mais ça passe) sur le pas de vis de l’électroaimant avant de l’insérer dans la boîte supérieure.
- Attention, quand on a passé les fils des aimants, on ne peut plus retirer les aimants.
- Mettez du feutre pour identifier lesquels des 4 fils correspondent à quel aimant, après c’est un peu dur de les identifier
- J’ai prévu de pouvoir bouger l’axe des aimants de 2mm afin de les centrer sur les touches de la télécommande
- Les boules de diamètre 12mm passent dans les écrous et la boîte supérieure, c’est donc démontable sans les décoller
- J’ai mis des bouts de scotch double face derrière la télécommande et les modules Evology afin que rien ne bouge si la boîte n’est pas gardée verticale
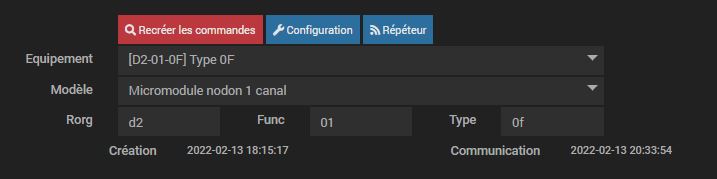
INTEGRATION JEEDOM
Il suffit de se documenter sur les modules Evology, mais je donne ici les quelques détails importants.
Après alimentation, et avec le protocole EnOcean, mettre en mode inclusion, choisir « Automatique ».
Cliquer 3 fois de suite sur le bouton du module, il est intégré.
Ensuite, cliquer sur « Configuration »:
Et régler les choses ainsi:
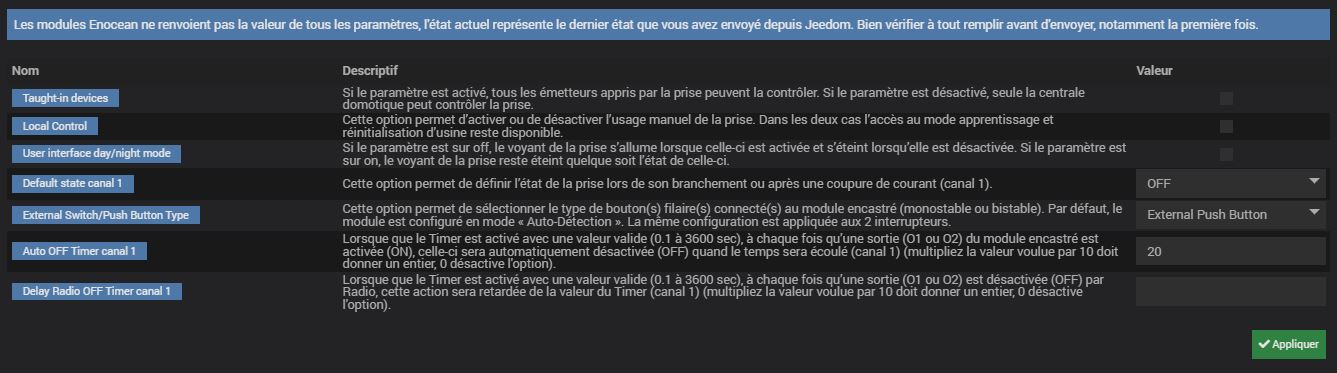
Soit:
- External Push Button (pour le mode gâche électrique)
- Auto off: 20 pour 2 secondes de fonctionnement
Appliquer les paramètres, c’est prêt !
Remarque: vous pourrez utiliser n’importe quel module de n’importe quelle marque qui réalise la même chose…
UTILISATION
Il est possible de l’utiliser manuellement en appuyant directement sur les deux tiges des électroaimants ou avec Jeedom :
Et voilà, le seul problème dans tout ça, c’est évidemment le budget hors frais de port qui s’élève quand même à environ 400€ :
- 200€ d’électronique
- 200€ d’impression 3D
- Quelques euros de vis, joints, fils etc…
Dispo pour répondre à vos questions avec plaisir, ou pour échanger à propos de tout cela !
1 « J'aime »
C’est intéressant pour l’utilisation d’életro-aimants. Par contre je me demande, n’était-il pas possible d’ouvrir la télécommande et de venir souder des fils à la place des boutons pour relier à un contact sec ?
C’est effectivement une chose à laquelle j’ai pensé, mais n’étant pas propriétaire de la télécommande, il aurait fallu pouvoir la remettre dans son état initial à chaque visite (j’ai déjà connu un problème avec EPS parce que j’avais moi même bricolé un capteur). J’ai opté pour une solution non intrusive pour cela
Effectivement, très bonne raison
Bonsoir.
Et pourquoi ne pas demander une autre télécommande ?
Cela revient vraiment (beaucoup) moins cher.
Oui,
C’est un chouette projet, mais avec ce budget, je préfère acheter une imprimante 3d, et utiliser plutot un esp avec 2 servomoteurs.
Pour le tarif, ceux qui ont une imprimante 3D le réduiront de moitié déjà.
A ces dimensions de pièces, le résultat n’est toutefois pas garanti avec une imprimante pas cher, mais ça vaut le coup d’essayer.
Avoir une autre télécommande ? Le problème reste le même, l’objectif est de ne pas toucher à la télécommande car nous n’en avons pas le droit.
Il y a aussi moyen de faire bien moins cher (ce n’étais pas ma problématique) en externalisant tout ce qui est électrique, la boîte peut être de bien plus faibles dimensions et on peut ne pas fermer les contours etc. pour gagner en matière.
De même, l’appli Homiris permettant l’activation de l’alarme, il est possible de n’automatiser que la désactivation.
Moi, je souhaitais avoir les 2 commandes et le tout dans une boîte fermée contenant le tout.
Je souhaitais aussi garder la commande manuelle accessible sans source électrique et sans devoir démonter le tout.
Oui il y a d’autres méthodes, mais cela m’a conduit à réaliser ces choix.
Pas de soucis, je comprend la démarche. Il m’est également arrivé de choisir la facilité, et de ne pas lésiné sur le matériel pour un projet, et de me retrouver avec plusieurs centaines d’euros de dépenses…
Après, chacun ses priorités.
L’important, c’est que le résultat te convienne.
Merci pour ta réponse. Oui, je suis ravi car le résultat est là
Salut @DDEF ,
Je viens de parcourir ton post, hyper rigoureux, bravo !
Pourrais-tu nous faire un bilan d’utilisation après un petite année ?
Toujours en fonctionnement ? tu en es content ?
Coté budget, je trouve que ça coince, je réfléchis à une vesion cheap à base d’esp + servo moteur.
Pour un proto, ça pourrait faire l’affaire ![]()
Tu pourrais m’indiquer la fonction des différents boutons ? le « P » notamment stp.
Par ailleurs, cette télécommande permet-elle l’activation partielle ou uniquement totale ?
Merci pour tes réponses
++
Salut
Depuis que j’ai créé cette boite, cela foncionne à merveille et tout le temps. Je n’ai jamais plus utilisé de télécommande, et depuis peu, j’ai réussi à convaincre mon épouse qui utilise seulement son téléphone ![]()
Je n’ai pas encore ouvert la boite pour voir l’usure des boutons, je le ferai à une prochaine visite technique d’Homiris.
Cumulé au plugin « Mail Listner » pour connaitre l’état de l’alarme, c’est fantastique.