Bonjour,
Je vous propose un tuto d’intégration (amélioré) d’un robot aspirateur Roborock sous Valetudo pour l’application mobile plugin-jeemate.
Le but étant bien évidemment de surveiller l’activité du robot et de le commander à distance.
Le robot aspirateur Roborock a été ajouté dans Jeedom à partir du plugin plugin-jmqtt suite au passage sous Valetudo.
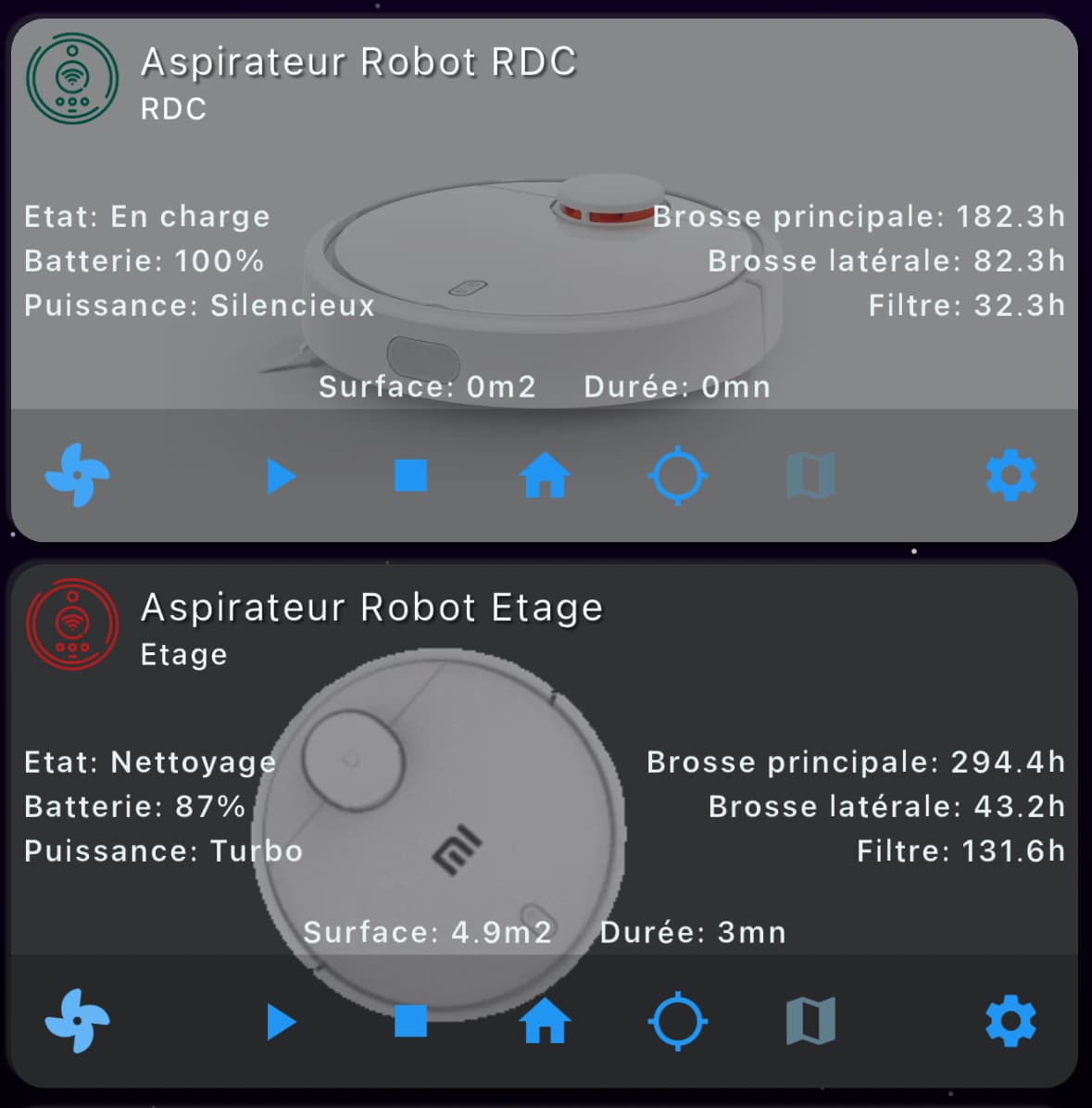
![]() L’intégration dans Jeemate est intuitive et immédiate à l’aide des génériques spécifiques disponibles depuis le plugin Jeemate et exploités automatiquement par l’application.
L’intégration dans Jeemate est intuitive et immédiate à l’aide des génériques spécifiques disponibles depuis le plugin Jeemate et exploités automatiquement par l’application.
Mais ce tuto propose d’aller plus loin et d’ajouter des commandes supplémentaires.
Sur mon Jeedom, j’ai donc les objets suivants :
- équipement JMqtt :
[RDC][aspi Robot RDC] - virtuel Jeedom :
[RDC][aspiRobotRdcVirtuel]
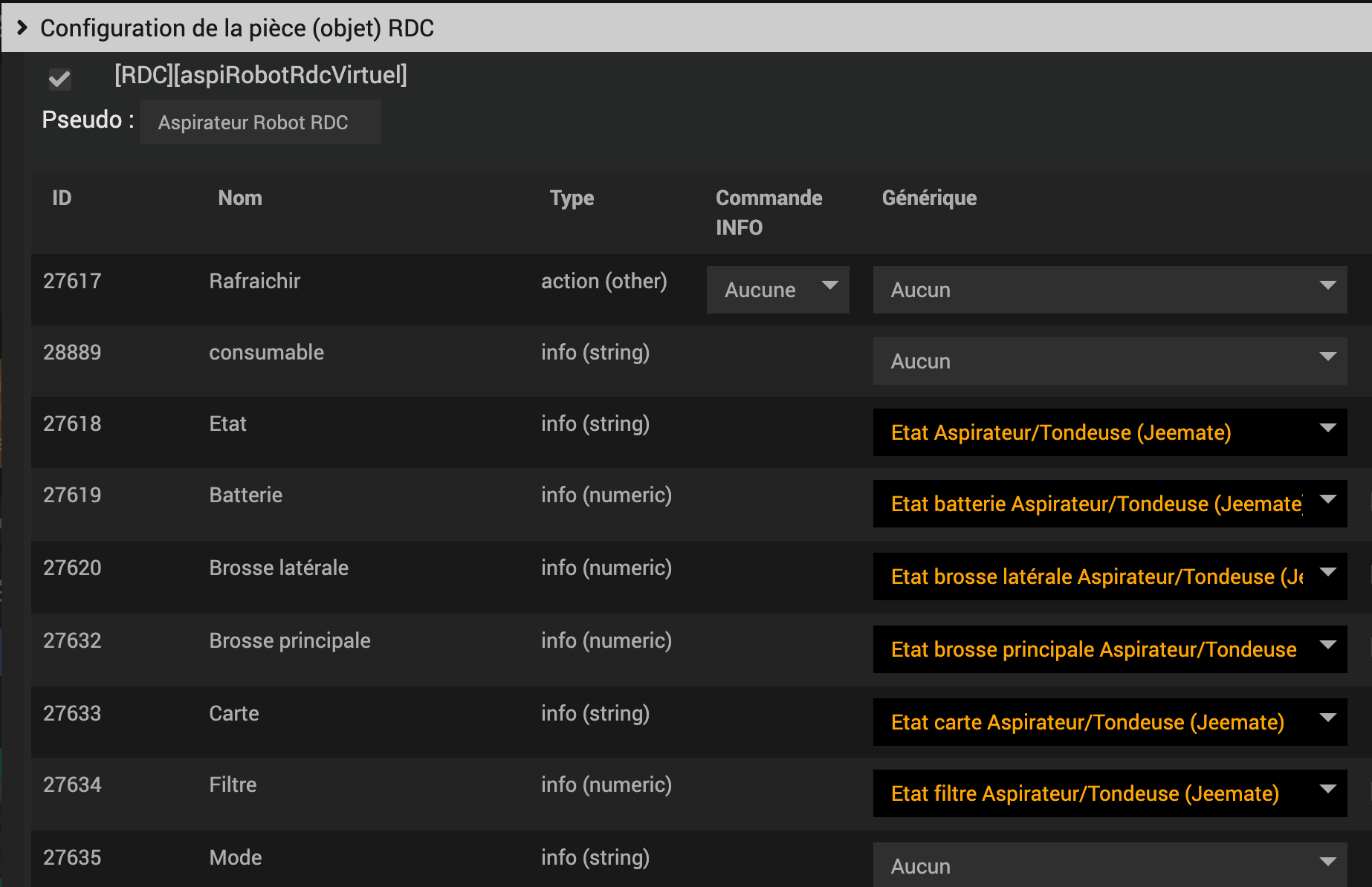
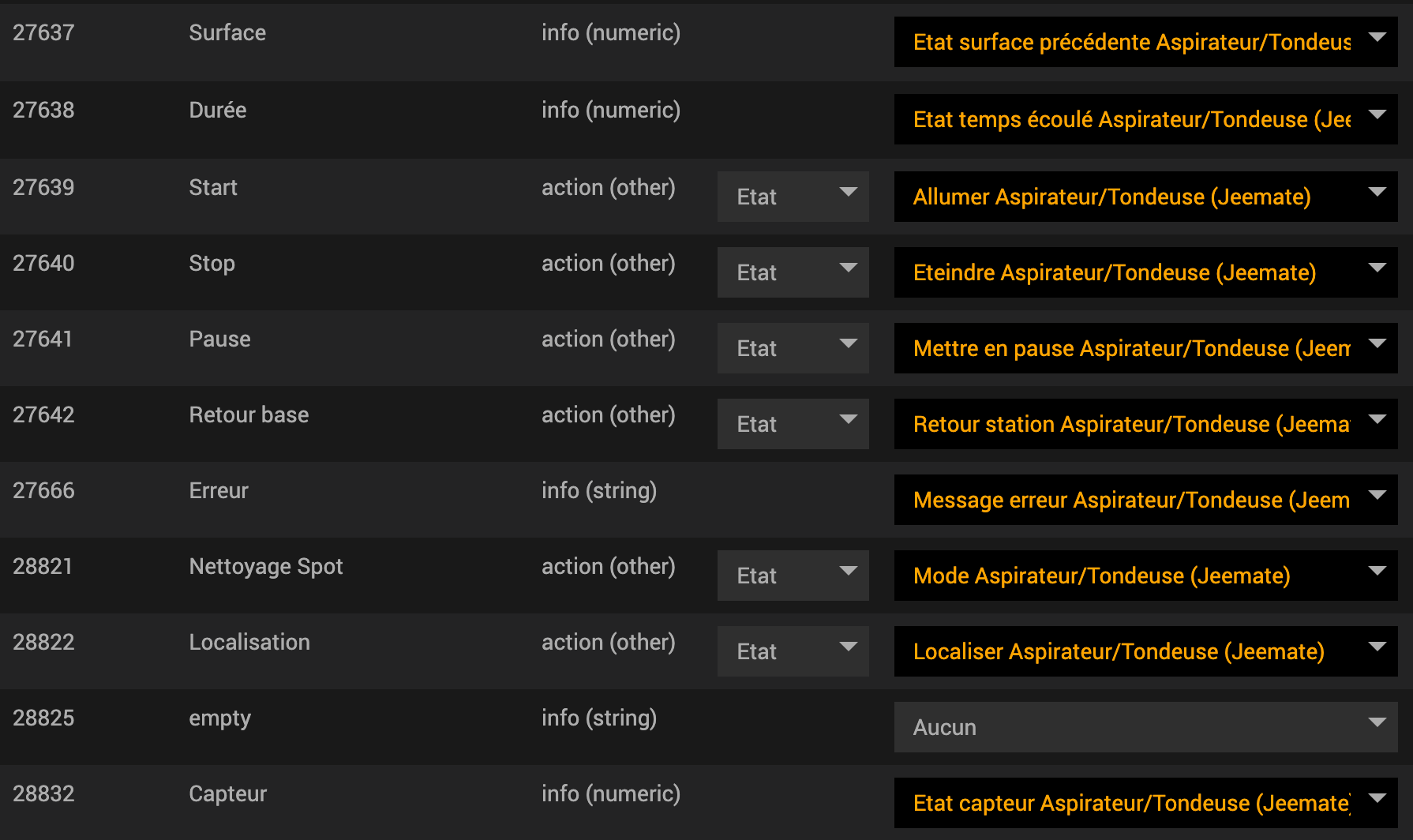
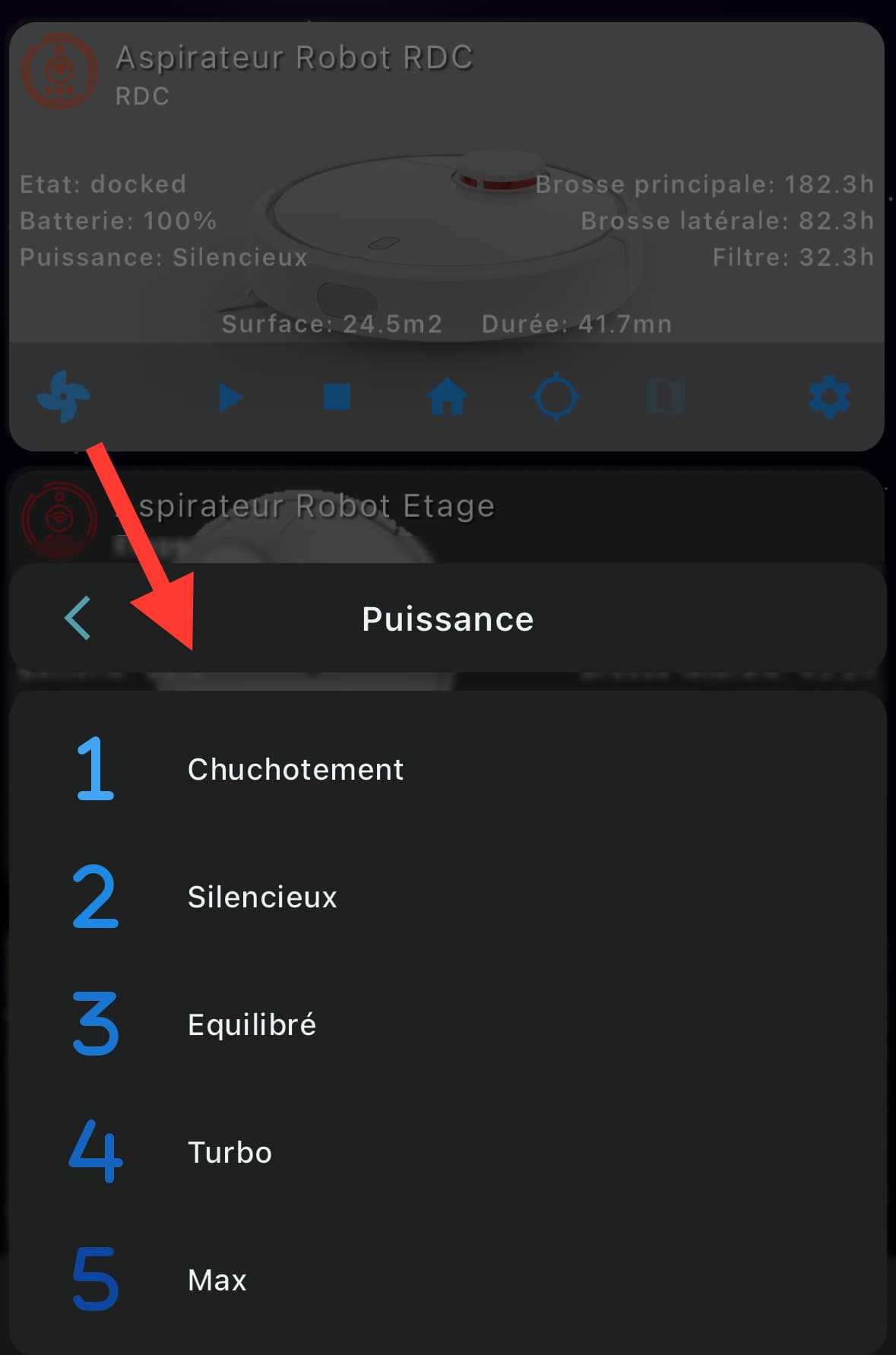
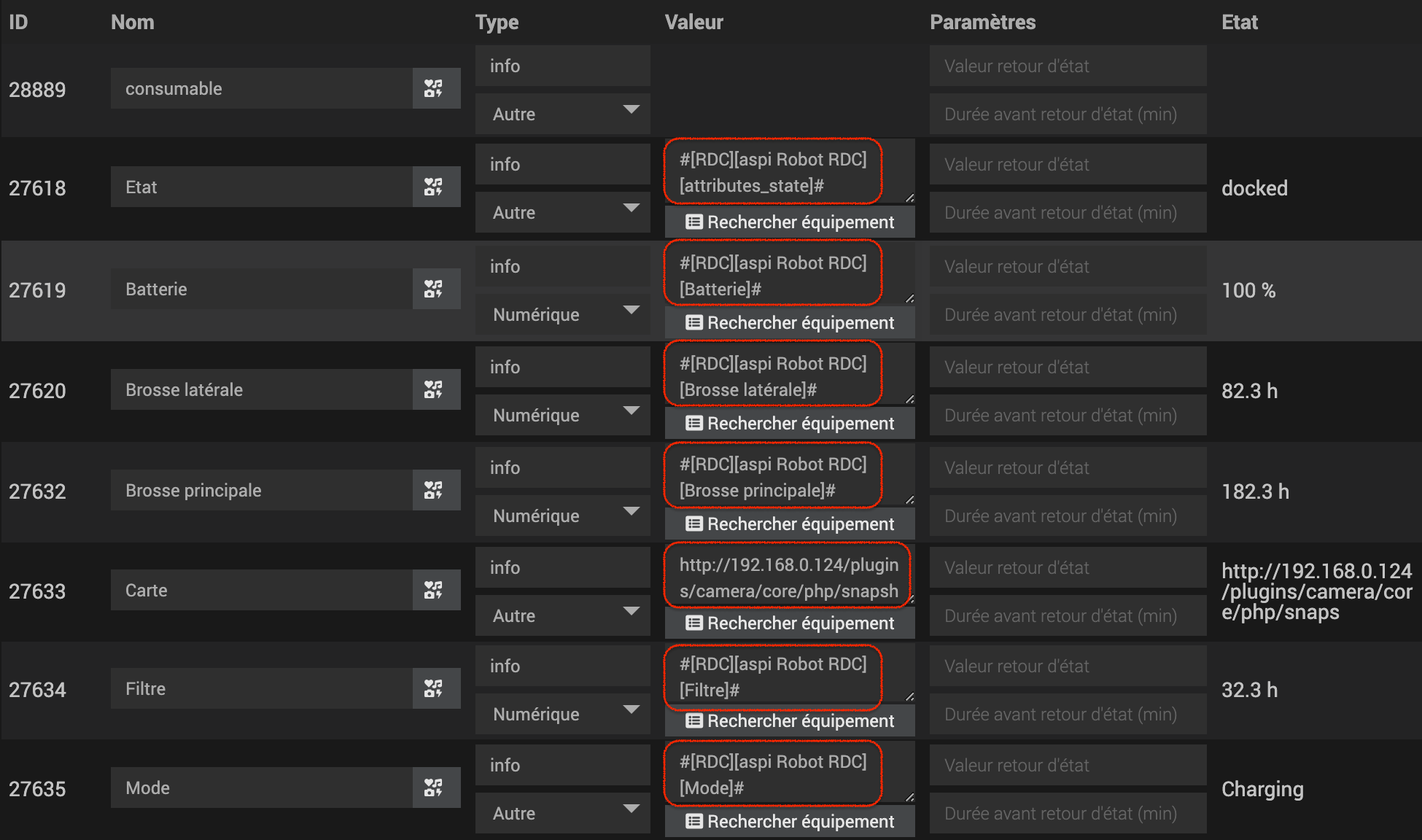
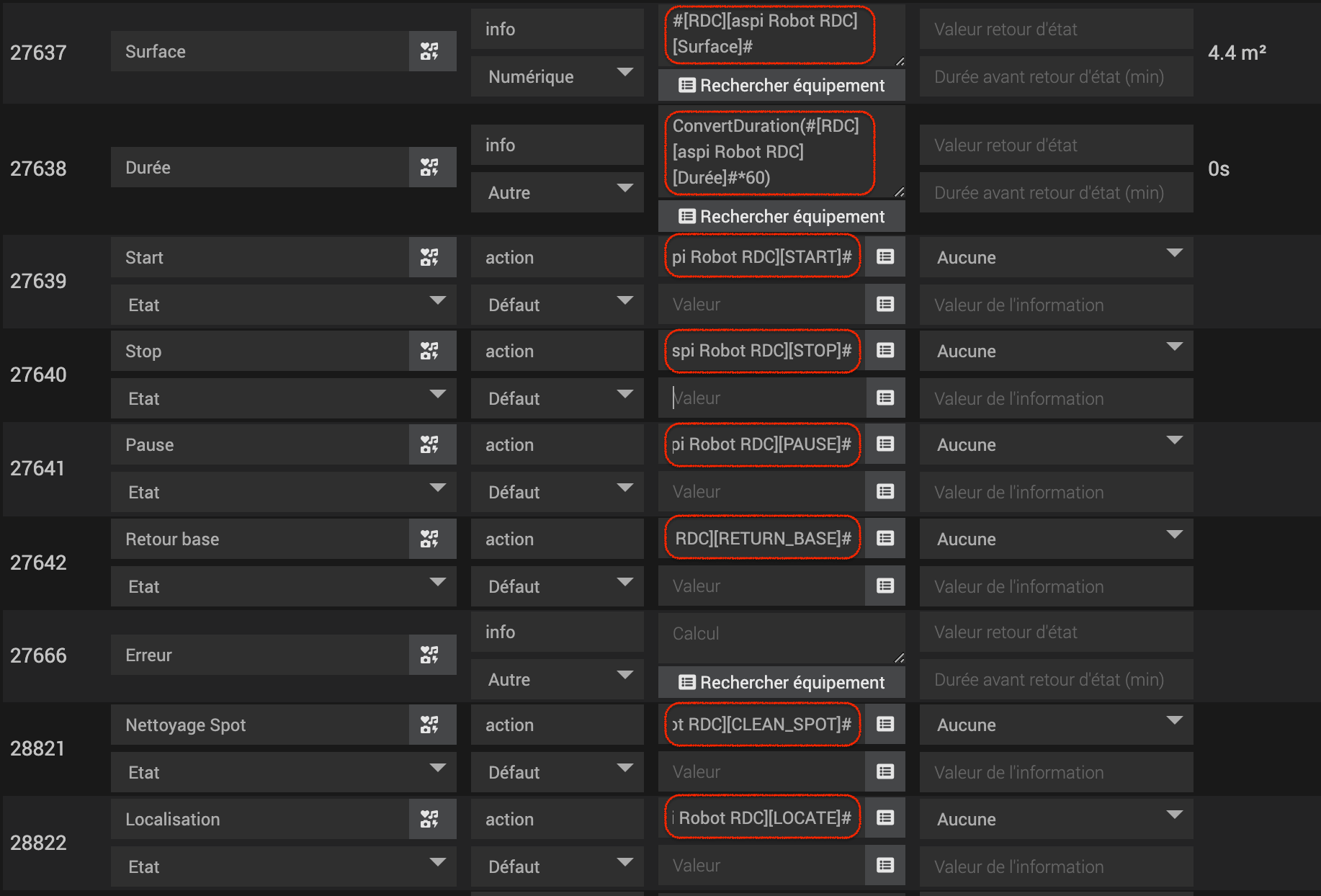
![]() J’ai donc commencé par créer mon objet virtuel en faisant correspondre les principales commandes du plugin JMqtt et en ajoutant mes propres commandes supplémentaires et nécessaires pour la suite :
J’ai donc commencé par créer mon objet virtuel en faisant correspondre les principales commandes du plugin JMqtt et en ajoutant mes propres commandes supplémentaires et nécessaires pour la suite :
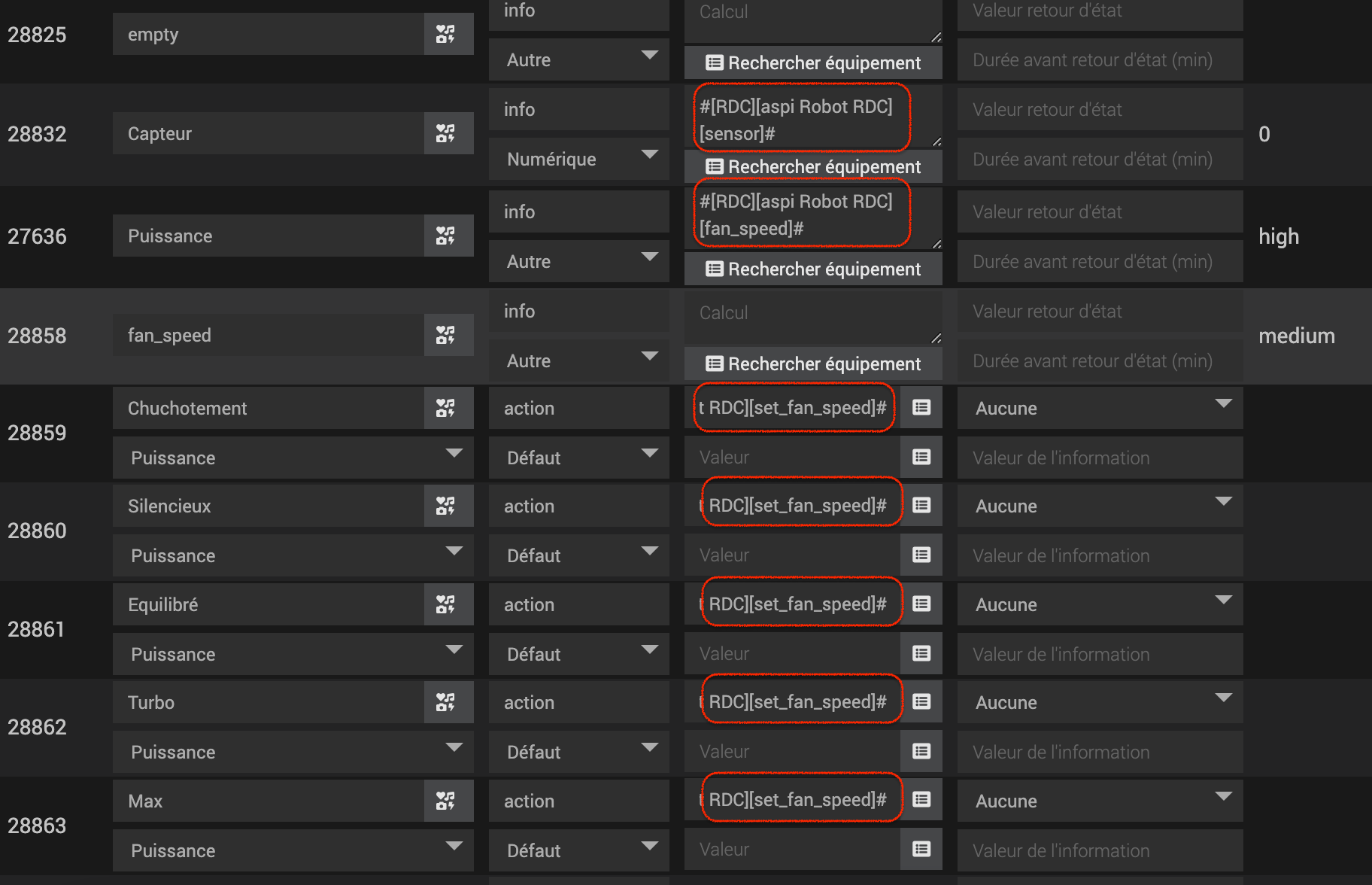
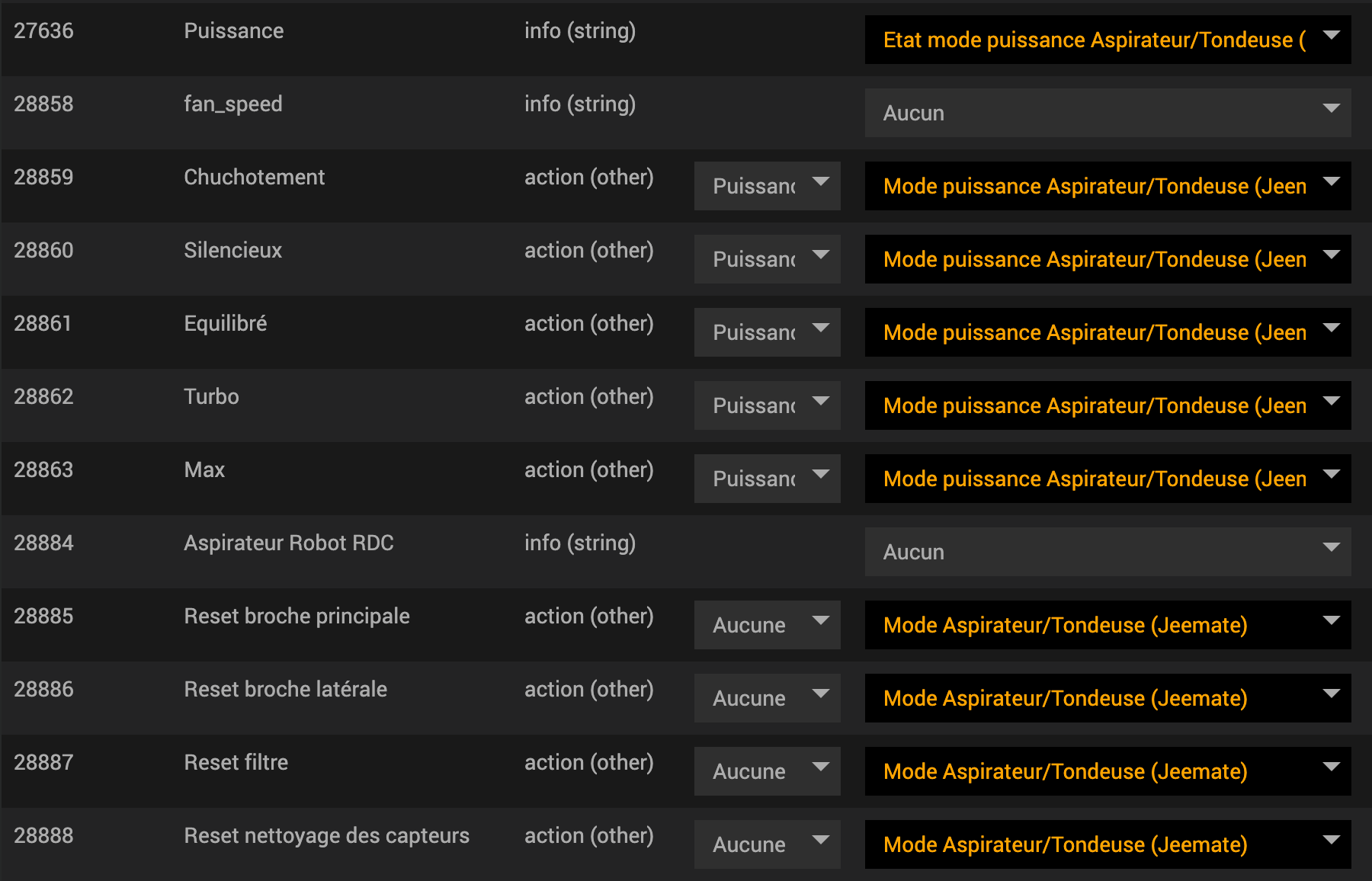
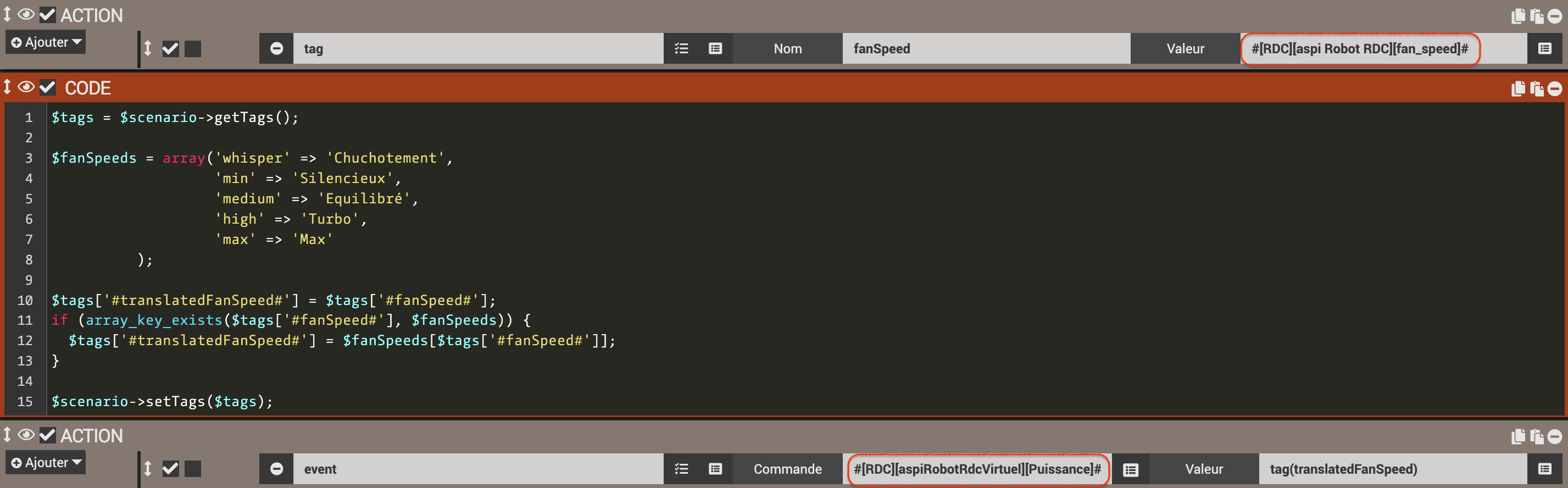
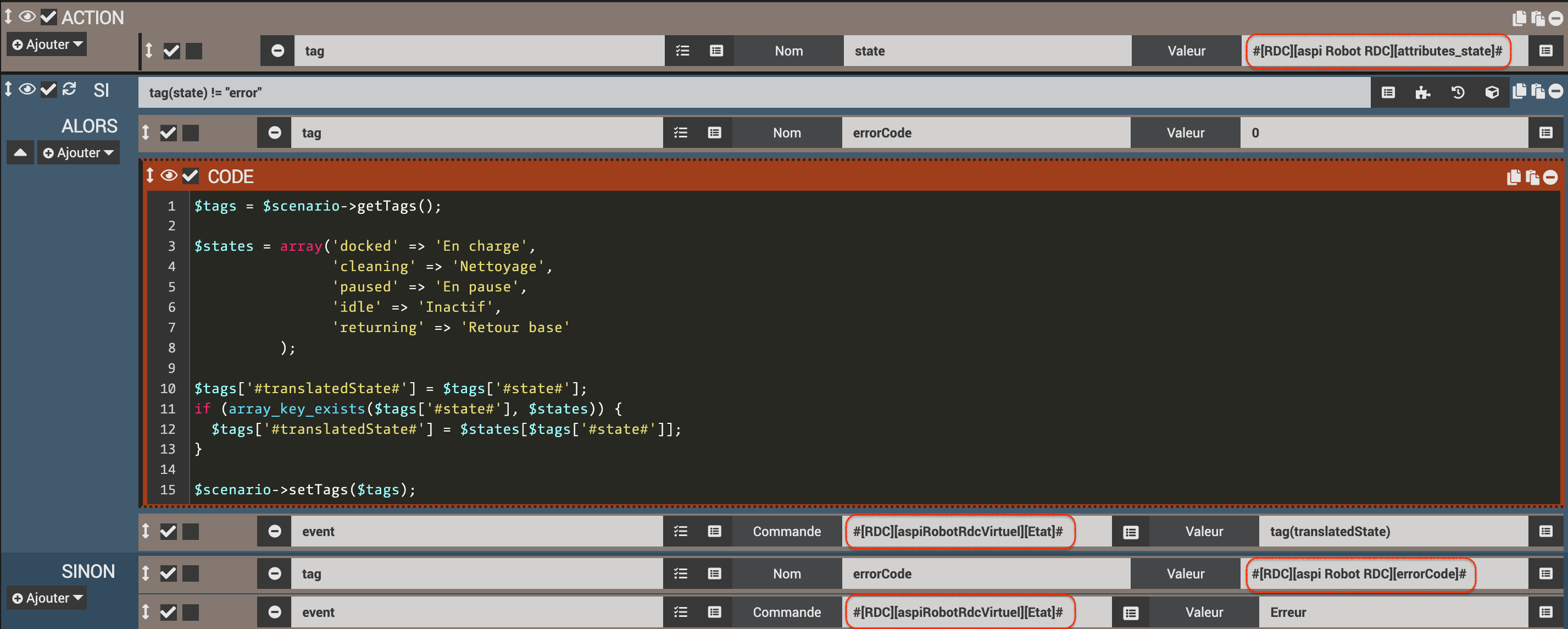
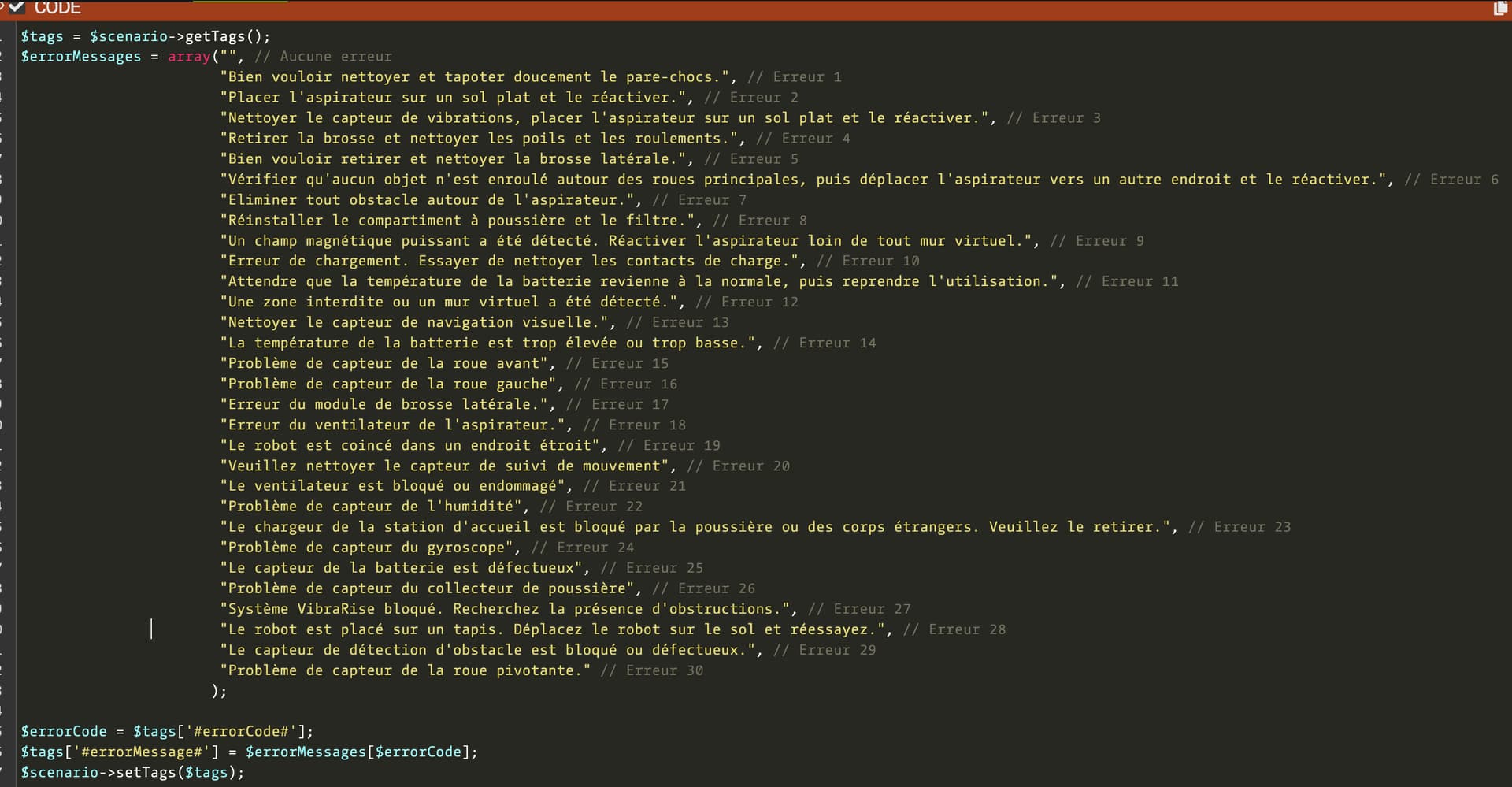
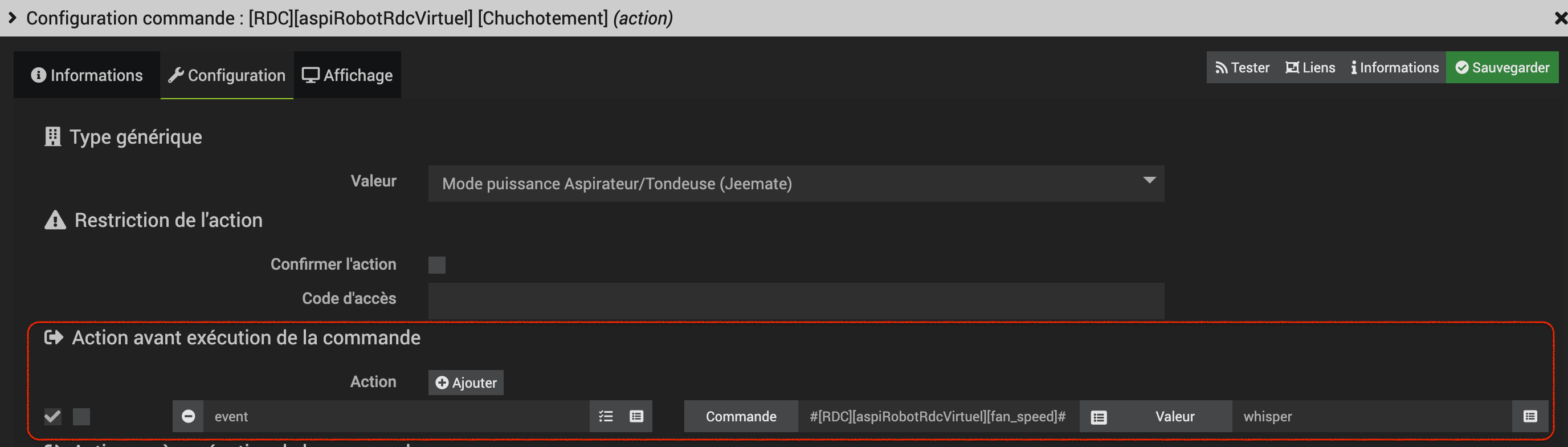
Action avant exécution des commandes de puissance (ids 28859 à 28863) :
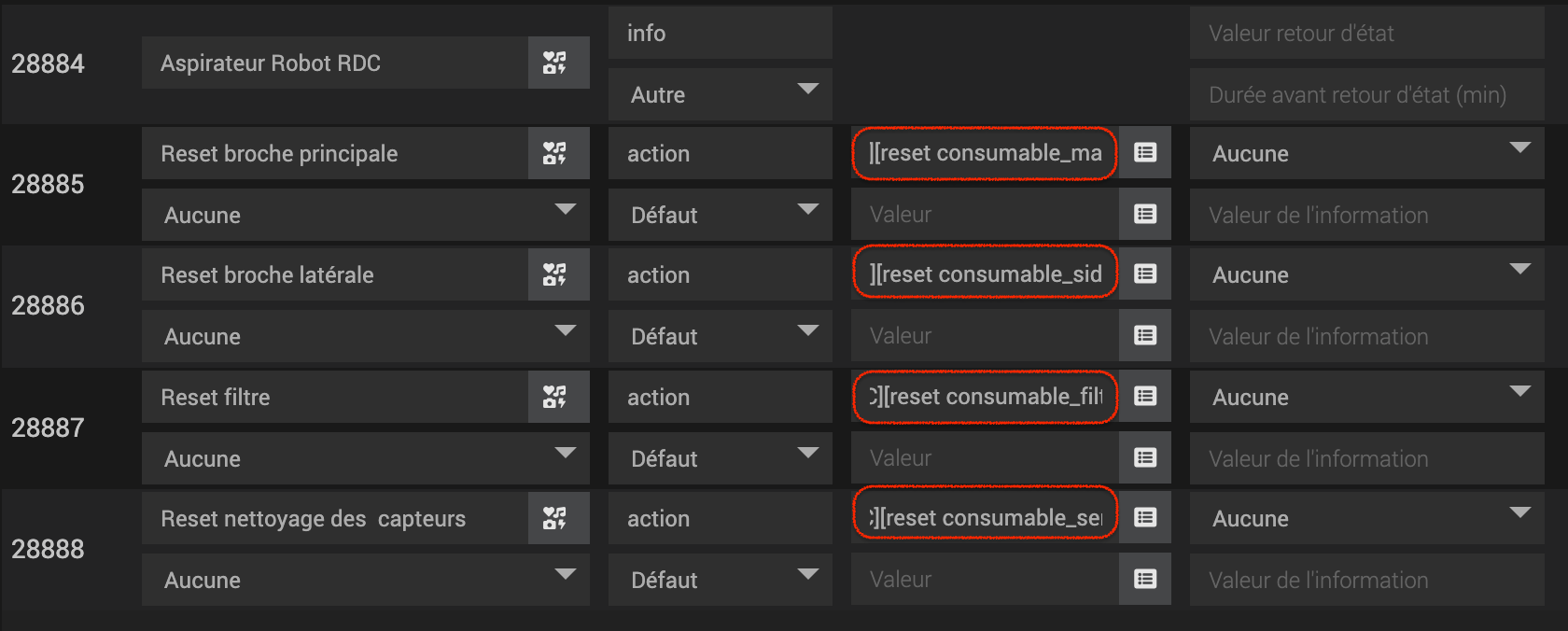
Liste des valeurs des commandes complètes pour les ids suivants (coupées sur la capture) :
- 28885 : #[RDC][aspi Robot RDC][reset consumable_main_brush_work_time]#
- 28886 : #[RDC][aspi Robot RDC][reset consumable_side_brush_work_time]#
- 28887 : #[RDC][aspi Robot RDC][reset consumable_filter_work_time]#
- 28888 : #[RDC][aspi Robot RDC][reset consumable_sensor_dirty_time]#
![]()
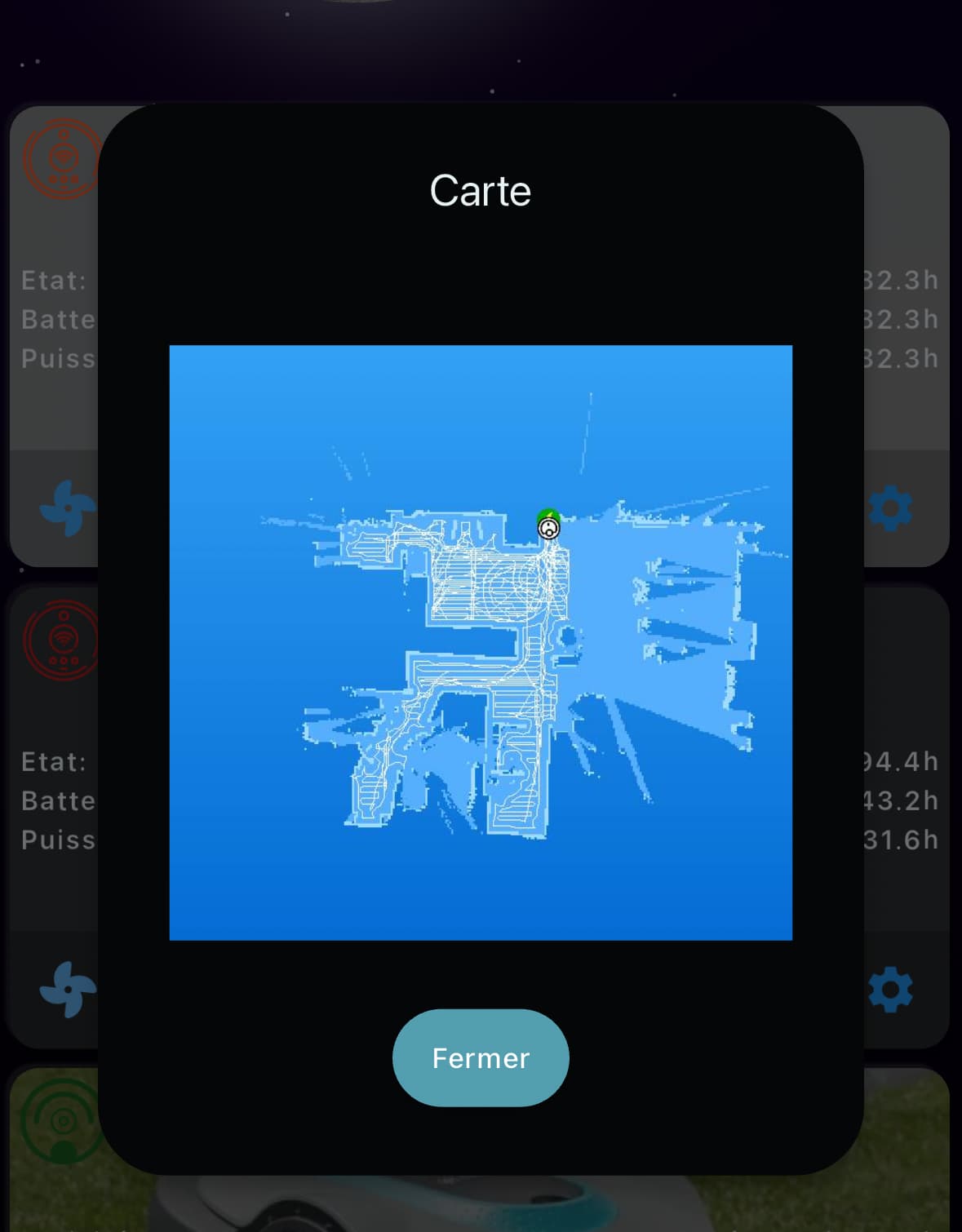
![]() La carte de l’aspirateur est paramétrée au niveau du plugin plugin-camera :
La carte de l’aspirateur est paramétrée au niveau du plugin plugin-camera :
- On a alors une valeur de la commande
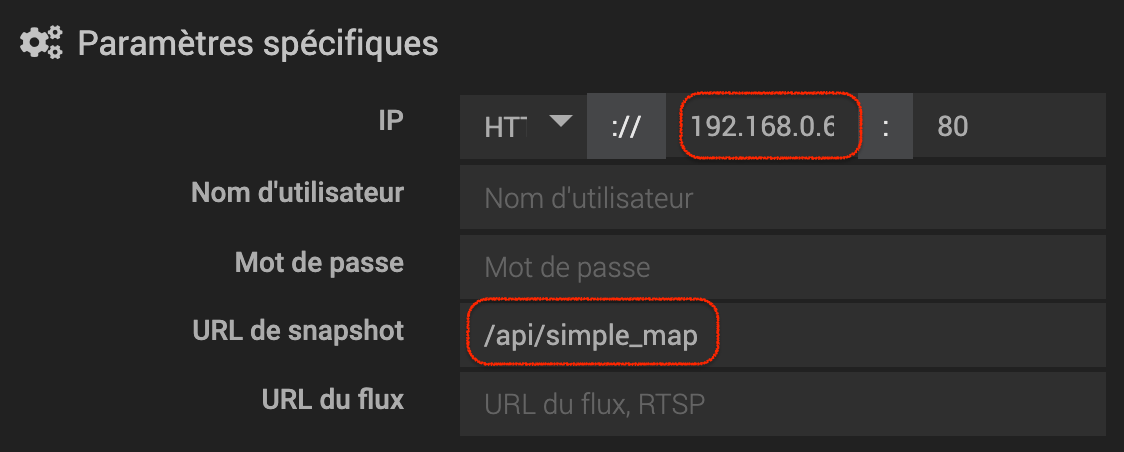
Cartesous la forme :http://ipJeedomLocale/plugins/camera/core/php/snapshot.php?id=2601&apikey=123456789 - Le paramétrage de l’équipement caméra est effectué à partir de l’ip du robot aspirateur :
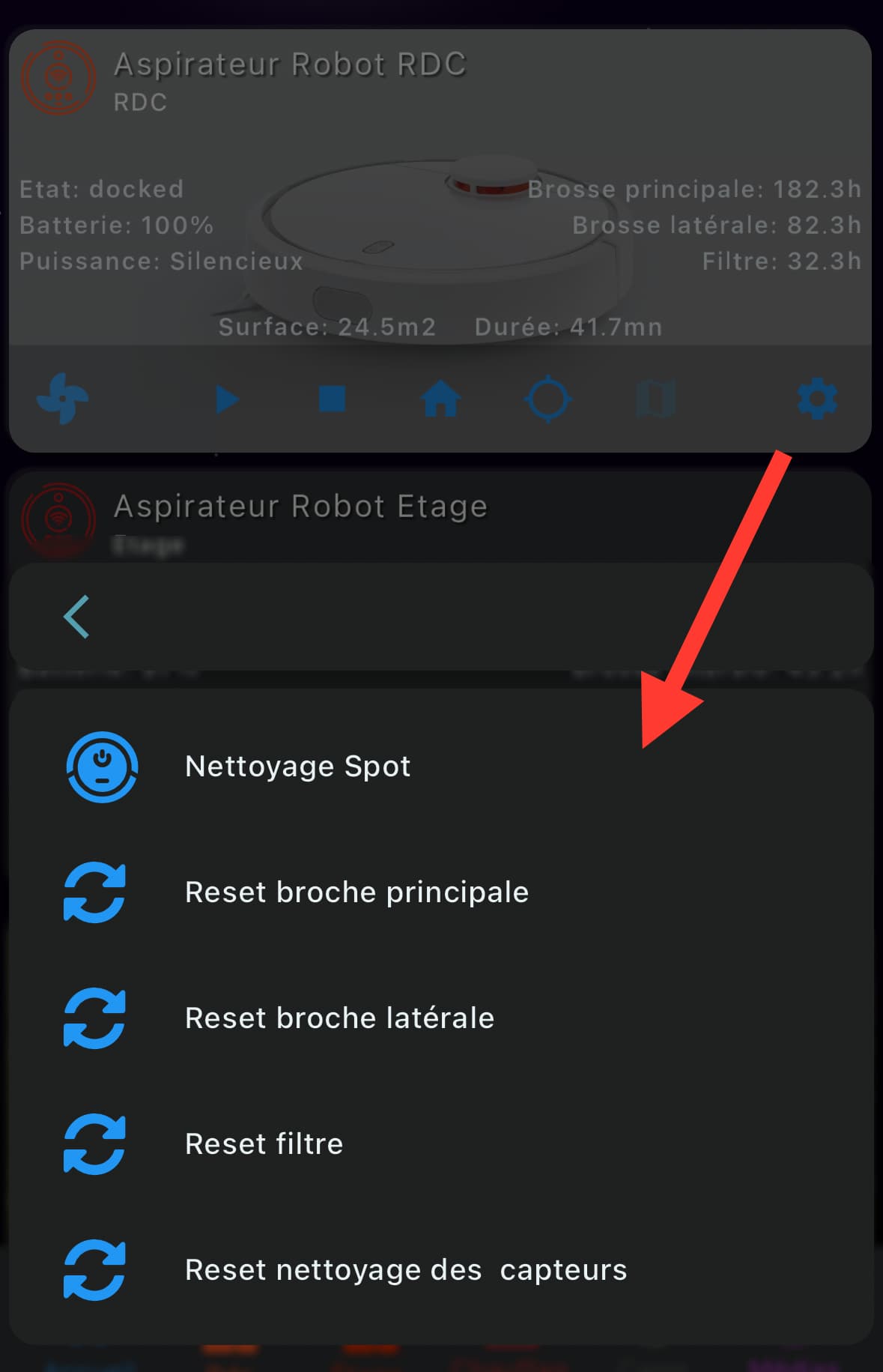
![]() On peut ensuite préparer l’intégration au niveau du plugin Jeemate très simplement juste en paramétrant la déclaration des génériques (prédéfinis par Jeemate) pour les commandes du virtuel.
On peut ensuite préparer l’intégration au niveau du plugin Jeemate très simplement juste en paramétrant la déclaration des génériques (prédéfinis par Jeemate) pour les commandes du virtuel.