ok, j’ai compris, j’ai utilisé ton premier script, celui qui créé la commande avec l’ID de la pièce
merci pour ton aide
Merci @Luckies10 pour ton script, ca fonctionne nickel. 
Maintenant je vais m’inspirer de ce qu’a fait @Nemeraud pour créer mon design 
Je vais revoir le mien, et faire des cases à cocher pour sélectionner les pieces, l’actuel ne permet de faire 2 chambres et pas la 3eme par exemple
Effectivement, le but est de choisir toutes les pièces où on veut qu’il passe.
@Nemeraud
Beau boulot
Sans vouloir abuser, pourrais tu m’expliquer comment faire stp, je ne sais pas trop comment m’y prendre pour arriver à ton résultat.
J’ai créer un virtuel avec les différentes zone de ma maison, mais je ne peut en sélectionner qu’une à la fois, je ne sais pas comment faire une sélection multiple. 
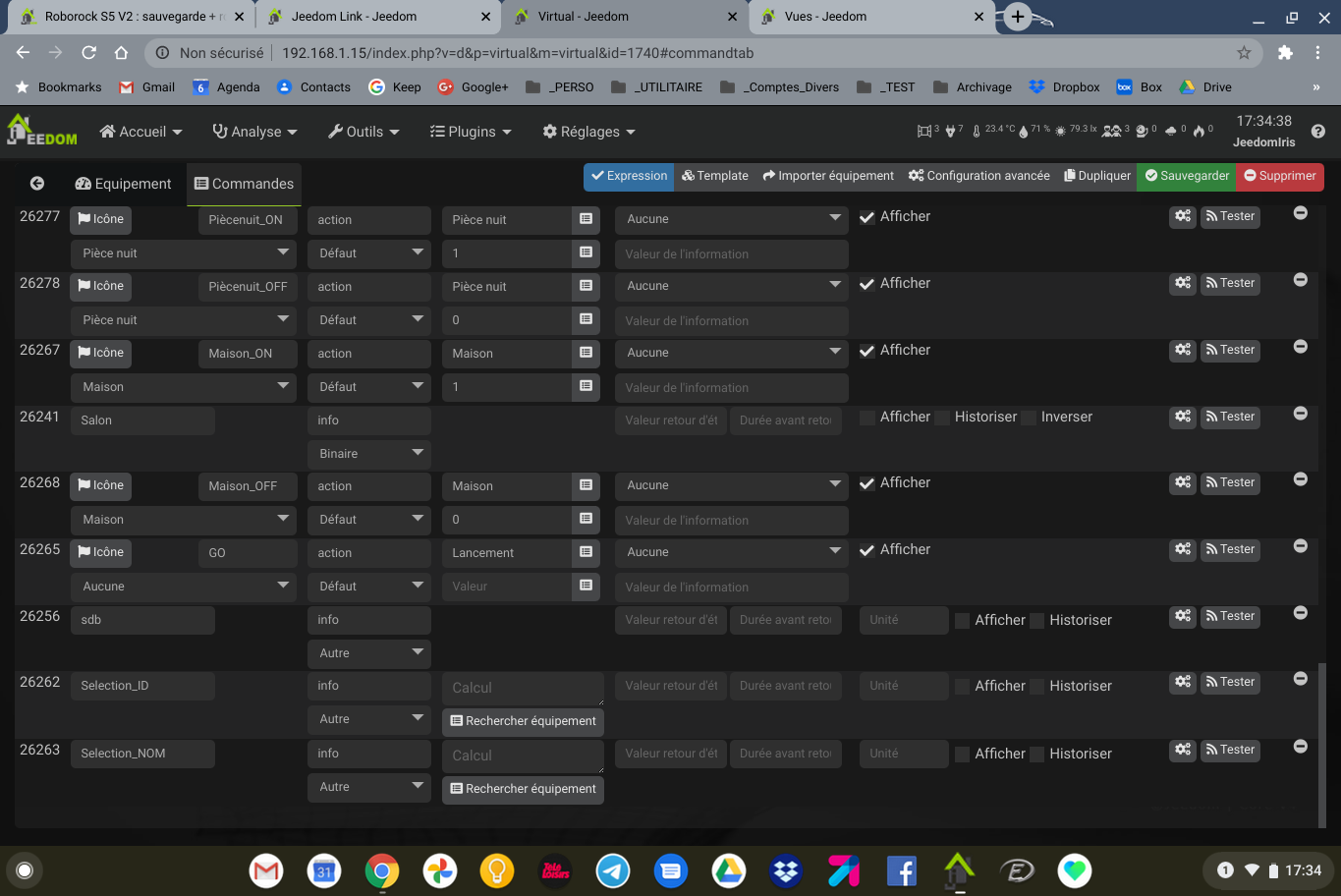
Il faut en effet faire un virtuel, avec 2 commandes actions pour chaque pièces, ex salon_on et salon_off, et mettre salon dans ‹ non information ›, ça va créer la commande info correspondante a la sauvegarde, il faut ensuite la sélectionner dans la liste déroulante des 2 commandes.
J’ai aussi fait 2 commandes infos, select_id et select_nom, et une commande action seule GO, qui lance le scénario
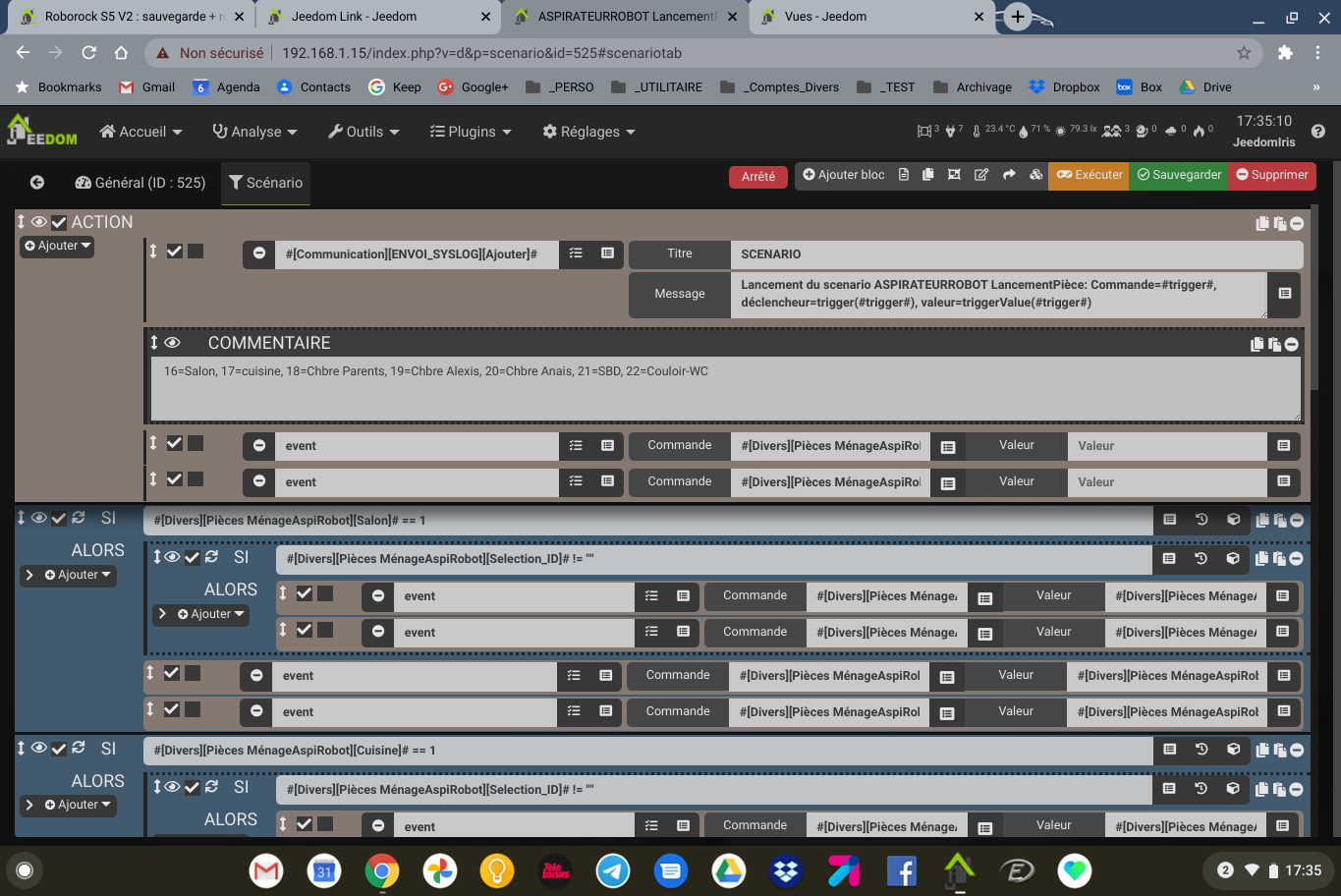
Le scénario va tester chaque commande info des pièces pour concaterner dans les commandes select, l’id et le nom de la pièces
Les actions pièces de vie et nuit, c’est directement dans les actions des commandes on et off que je lances les commandes on et off des pieces correspondantes
L’action maison, c’est pareil en utilisant les commandes on et off de pièces de vie et pièces de nuit.
2 « J'aime »
Est ce que tu pourrais me faire une capture d’écran de ton virtuel et de ton scénario stp?
Cela serait plus simple pour moi de comprendre la logique en les analysant. 
je suis encore débutant sur ce genre d’exercice.
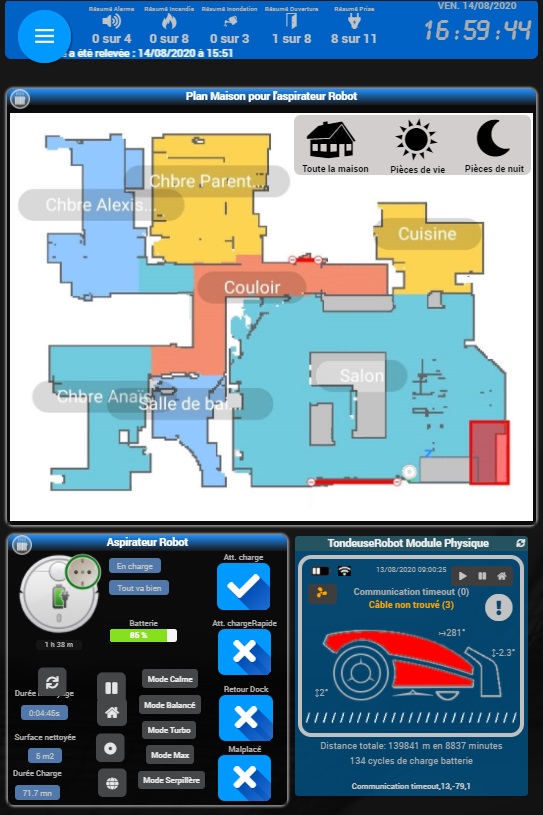
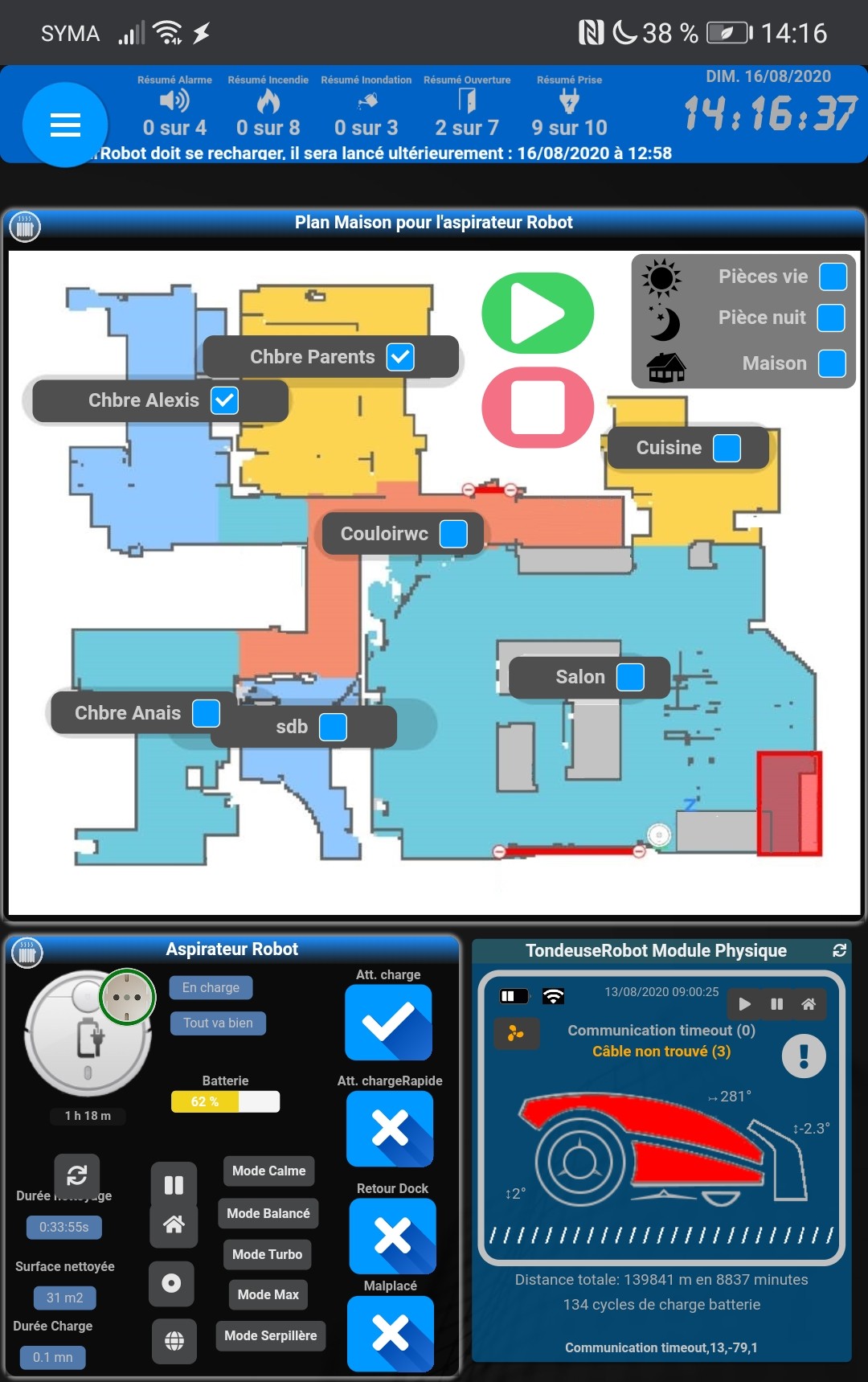
voici 2 extraits si cela te parle plus que mes explications
mais dans une CE tu ne vois pas tout
Voici le template du scenario : LancementPieces.json.txt (57,0 Ko)
Pour le virtuel, je ne sais pas comment on exporte un template
Super, merci beaucoup, ça va bien m’aider.
Je te tiens au courant de l’avancé de mon chantier
Déja pour le virtuel ca ressemble pas mal à ce que je viens de faire
perso, je viens de passer une semaine a decouvrir home assistant et je le trouve incroyable, avec HACS et node-red c’est sans fin  .
.
du coup je migre completement dessus, surtout qu’il a excellente gestion parfaite du klf-200.
surtout qu’il tourne avec docker sur mon syno, plus besoin de machine virtuelle.
C’est l’éternel débat HA vs Jeedom sur les compatibilités… Mais je trouve quand Jeedom plus user friendly même si j’avoue que c’est tentant !
1 « J'aime »
en fait , je trouve que c’est l’inverse, j’ai fait mon setup beaucoup plus rapidement.
il faut taper quelque ligne, mais rien de compliquer. et node red pour faire ses actions en nodale, c’est juste parfait.
l’interet c’est que tout est ultra documenter, et il y a beaucoup de gens sur les forums. je n’ai jamais été bloqué plus de 10 mn sur un sujet. ensuite meme si ca me convient de payer un plugin, la realité est que ceux de dispo sur HA sont mieux fait pour ceux que j’utilisent. et peuvent etre repris a volonté par la communauté. pour l’instant je garde ma session jeedom en parallèle, pour comparer, mais je suis très surpris par HA.
C’est un peu HS mais HA ne fonctionne pas avec des protocoles comme le zwave ?
bonjour à tous
Petite question, je voudrais que l’aspirateur se positionne à cotés de la poubelle quand son bac est estimé à vider.
Comment se passer le positionnement par coordonnées ?
merci
Tu utilises la commande GoThere et en parametres les coordonnées de la poubelle : 26000,30000 par ex.
Bonjour, merci pour ta réponse @mounik34
Comment tu estimes ces coordonnées, au pif par tests ?
Il n’y a pas moyen de positionner le robot avec la télécommande virtuelle et de connaitre ces coordonnées ?
1 « J'aime »
La position initiale du robot est 25000,25000
Apres faut ajouter ou enlever selon les directions. Si mes souvenirs sont bons c’est env. 1000 pour 1m grossomodo.
Tu testes la commande et tu verras le point sur la carte de l’application apparaitre…
1 « J'aime »
ok nickel, je test ca
PS : c’est bien ca :
position de départ sur la base : 25000,25000 (dos à la base)
1er chiffre, si on l’augmente c’est pour aller à droite
2eme chiffre, si on l’augmente c’est pour avancer
1000 : un peu plus d’1 metre