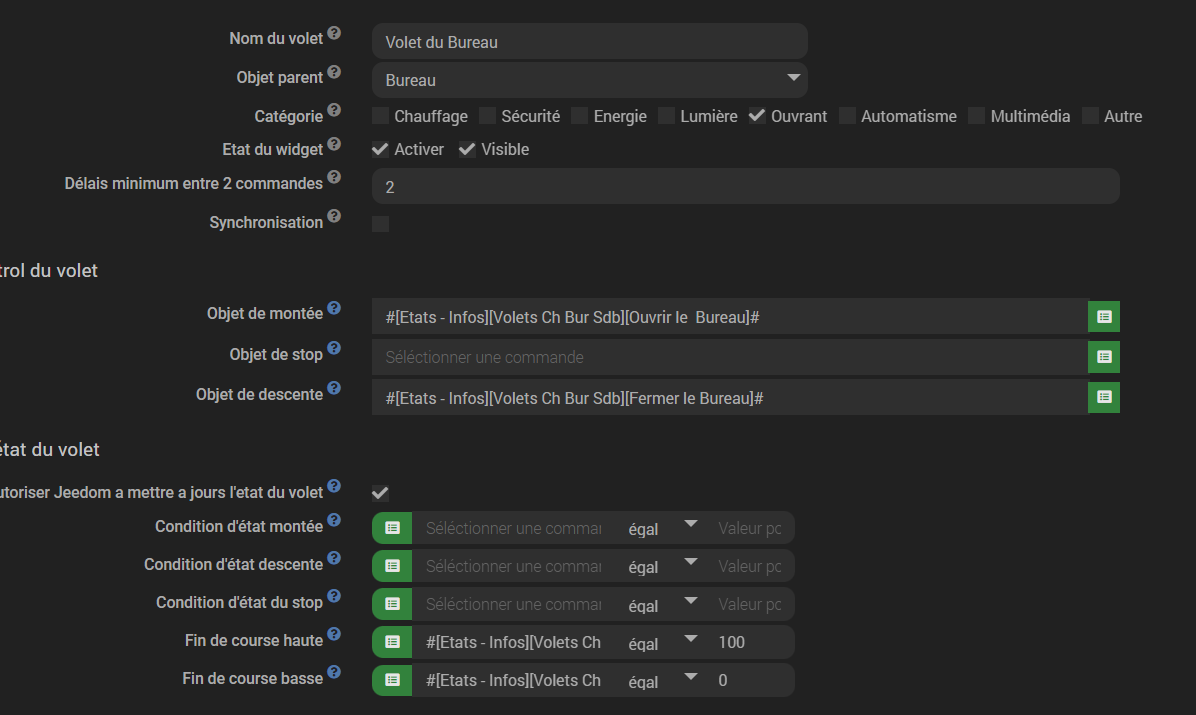
2.3) Objet d’état du volet
Les états de mouvement sont définis comme une condition, c’est à dire qu’il faut définir un objet (de votre équipement connecter au volet) ainsi qu’un opérande et une valeur.
* Utiliser les états sur :
* Les mouvement Jeedom : Permet, si coché de mettre à jours la hauteur par le retour d’état, ou sinon de forcer la valeur demander
* Condition d’état montée : Cet état indique au plugin une montée
* Condition d’état descente : Cet état indique au plugin une descente
* Condition d’état arrêt : Cet état indique au plugin un arrêt de mouvement
* Fin de course : Commande Jeedom représentant la fin de course (info -> Binaire :1 = Volet complètement fermée)
Tous les état ne sont pas obligatoires. Ils doivent correspondre à ce qui est disponible sur votre actionneur.
J’ai corrigé quelques fautes.
Par contre, je trouve que cette partie de la doc pourrait être développée, en particulier avec des exemples, car c’est peu clair si on ne maitrise pas le fonctionnement de différents types de volets en domotique.
Ce que je ne comprends pas clairement:
quelle différence avec les trois commandes déjà entrée: action vs état?
je ne connais pas de commandes états montée, descente ou stop pour mes volets. Je n’ai que des commandes actions dans ces cas.
La commande fin de course à 1, m’est aussi inconnue, l’état fermé est 0 et ouvert 99 sur mes volets.
Donc au final toute cette partie me semble inutile dans mon cas, ce qui me surprend.
Personnellement, je veux bien aider, modifier la doc et faire des captures d’écrans du paramétrage, t’aider même dans l’évolution du plugin en tant que Beta Testeur, mais je n’arrive à rien déjà dans mon cas. j’ai tout essayé.
Mais si j’arrive à le faire fonctionner sans que le module ne souffre pas trop de par les multiples actions répétées dessus par le plugin alors je m’empresserai de t’aider.
Ok alors je t’expose mon cas, qui peut être le cas de beaucoup et on voit si je peux aider du coup.
Je suis sur des volets commandés par des modules DIO On / Off (je ne sais pas lesquels , je viens d’arriver dans cette maison il y a peu )
Sur ces modules Dio , il y a une télécommande et j’ai appris à Jeedom moyennant le plugin RFxcom les codes de chaque commande de tous les volets (seulement 1 et 0)
Concentrons nous donc sur le volet du Bureau, côté Rxfcom j’ai ceci
[2022-06-23 14:25:02]DEBUG : [Bureau][Volet du Bureau][Démon] Synchronisation
[2022-06-23 14:25:02]DEBUG : [Bureau][Volet du Bureau][Démon] Execution du mouvement proportionnel
[2022-06-23 14:25:02]DEBUG : [Bureau][Volet du Bureau] Exécution de la commande [Etats - Infos][Volets Ch Bur Sdb][Fermer le Bureau]
[2022-06-23 14:25:03]DEBUG : [Bureau][Volet du Bureau] Le volet est à 44% et nous allons le descendre de 8%
[2022-06-23 14:25:03]DEBUG : [Bureau][Volet du Bureau] Temps d’action 2000000µs
[2022-06-23 14:25:03]DEBUG : Detection sur le listener End : {« Volets_id »:« 1563 »,« event_id »:« 44394 »,« value »:« 0 »,« datetime »:« 2022-06-23 14:25:02 »,« listener_id »:« 435 »}
[2022-06-23 14:25:03]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==100][0==100] = Faux
[2022-06-23 14:25:03]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==0][0==0] = Vrai
[2022-06-23 14:25:03]INFO : [Bureau][Volet du Bureau][Fin de cours]: Fin de course basse détectée, mise a 0% de l’etat
[2022-06-23 14:25:24]DEBUG : [Bureau][Volet du Bureau][Démon] Execution du mouvement proportionnel
[2022-06-23 14:25:24]DEBUG : [Bureau][Volet du Bureau] Exécution de la commande [Etats - Infos][Volets Ch Bur Sdb][Ouvrir le Bureau]
[2022-06-23 14:25:24]DEBUG : [Bureau][Volet du Bureau] Le volet est à 0% et nous allons le monter de 42%
[2022-06-23 14:25:24]DEBUG : [Bureau][Volet du Bureau] Ajout du temps de décollement
[2022-06-23 14:25:24]DEBUG : [Bureau][Volet du Bureau] Temps d’action 8880000µs
[2022-06-23 14:25:24]DEBUG : Detection sur le listener End : {« Volets_id »:« 1563 »,« event_id »:« 44394 »,« value »:« 1 »,« datetime »:« 2022-06-23 14:25:24 »,« listener_id »:« 435 »}
[2022-06-23 14:25:24]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==100][1==100] = Faux
[2022-06-23 14:25:24]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==0][1==0] = Faux
[2022-06-23 14:25:33]INFO : [Bureau][Volet du Bureau][Démon] Execution du stop
[2022-06-23 14:25:33]DEBUG : [Bureau][Volet du Bureau] Exécution de la commande [Etats - Infos][Volets Ch Bur Sdb][Ouvrir le Bureau]
[2022-06-23 14:25:33]DEBUG : [Bureau][Volet du Bureau] Mise à jour manuelle de la hauteur
[2022-06-23 14:25:33]DEBUG : [Bureau][Volet du Bureau] Temps de mouvement du volet de 8903056µs
[2022-06-23 14:25:33]DEBUG : [Bureau][Volet du Bureau] Suppression du temps de décollement
[2022-06-23 14:25:33]DEBUG : [Bureau][Volet du Bureau] Mouvement du volet de 42%
[2022-06-23 14:25:33]DEBUG : [Bureau][Volet du Bureau] Le volet est à 42%
[2022-06-23 14:25:33]DEBUG : Detection sur le listener End : {« Volets_id »:« 1563 »,« event_id »:« 44394 »,« value »:« 1 »,« datetime »:« 2022-06-23 14:25:33 »,« listener_id »:« 435 »}
[2022-06-23 14:25:33]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==100][1==100] = Faux
[2022-06-23 14:25:33]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==0][1==0] = Faux
[2022-06-23 14:32:57]DEBUG : [Bureau][Volet du Bureau][Démon] Synchronisation
[2022-06-23 14:32:57]DEBUG : [Bureau][Volet du Bureau][Démon] Execution du mouvement proportionnel
[2022-06-23 14:32:57]DEBUG : [Bureau][Volet du Bureau] Exécution de la commande [Etats - Infos][Volets Ch Bur Sdb][Ouvrir le Bureau]
[2022-06-23 14:32:57]DEBUG : [Bureau][Volet du Bureau] Le volet est à 42% et nous allons le monter de 9%
[2022-06-23 14:32:57]DEBUG : [Bureau][Volet du Bureau] Temps d’action 2000000µs
[2022-06-23 14:32:57]DEBUG : Detection sur le listener End : {« Volets_id »:« 1563 »,« event_id »:« 44394 »,« value »:« 1 »,« datetime »:« 2022-06-23 14:32:57 »,« listener_id »:« 435 »}
[2022-06-23 14:32:57]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==100][1==100] = Faux
[2022-06-23 14:32:57]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==0][1==0] = Faux
[2022-06-23 14:32:59]INFO : [Bureau][Volet du Bureau][Démon] Execution du stop
[2022-06-23 14:32:59]DEBUG : [Bureau][Volet du Bureau] Exécution de la commande [Etats - Infos][Volets Ch Bur Sdb][Ouvrir le Bureau]
[2022-06-23 14:32:59]DEBUG : [Bureau][Volet du Bureau] Mise à jour manuelle de la hauteur
[2022-06-23 14:32:59]DEBUG : [Bureau][Volet du Bureau] Temps de mouvement du volet de 2024109µs
[2022-06-23 14:32:59]DEBUG : [Bureau][Volet du Bureau] Mouvement du volet de 14%
[2022-06-23 14:32:59]DEBUG : [Bureau][Volet du Bureau] Le volet est à 56%
[2022-06-23 14:32:59]DEBUG : Detection sur le listener End : {« Volets_id »:« 1563 »,« event_id »:« 44394 »,« value »:« 1 »,« datetime »:« 2022-06-23 14:32:59 »,« listener_id »:« 435 »}
[2022-06-23 14:32:59]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==100][1==100] = Faux
[2022-06-23 14:32:59]INFO : [Bureau][Volet du Bureau]Evaluation de la condition : [#[Etats - Infos][Volets Ch Bur Sdb][BUR]#==0][1==0] = Faux
2s pour 8% cela me parait plutôt correcte, tu doit avoir un temps de monté autours de 25s
.
C’est quoi cette état qui son nom me fait pensé a un état de plusieurs volet?
Je pense que le bug est dans la gestion avec se retour d’état.
Peux tu essayé sans?
Peux tu me donné un peux de détail sur le fonctionnement de cette état
Il faut mieux supprimer la configuration de tes états car l’autorisation de Jeedom a mettre a jours l’état permet uniquement que jeedom n’attende pas le retour d’état pour se mettre a jours
Il n’interdit pas les retour d’état
Bon effectué aussi mais sans succès.
Après toutes ces tentatives et changement j’arrive toujours au même résultat.
En montée j’arrive à mettre une position, mais si je suis par exemple à 50% et que je positionne à 40% , le volet descend jusqu’au bout.
Merci en tout ca pour ton aide , je vais creuser encore, si j’ai quelque chose de concluant je t’en ferait part.