Bonjour,
j’ai installé Frigate en suivant le tuto de ngrataloup que je remercie vivement.
j’ai pu intégrer une caméra chinoise PTZ onvif mais je n’arrive pas à piloter les déplacements via MQTT.
Le plugin camera gère bien ceux-ci avec le modèle onvif-onvif.
jMQTT reçoit bien les events de la caméra et MQTT explorer voit bien passer les commandes mais la caméra ne régit pas
Ma config est :
onvif:
host: l’ip de la caméra
port: 80
j’ai utilisé le template du tuto pour passer les commandes.
Comment savoir comment le plugin camera onvif envoie les commandes.
Tant que ceci n’est pas OK, inutile de vouloir la piloter via mqtt/frigate
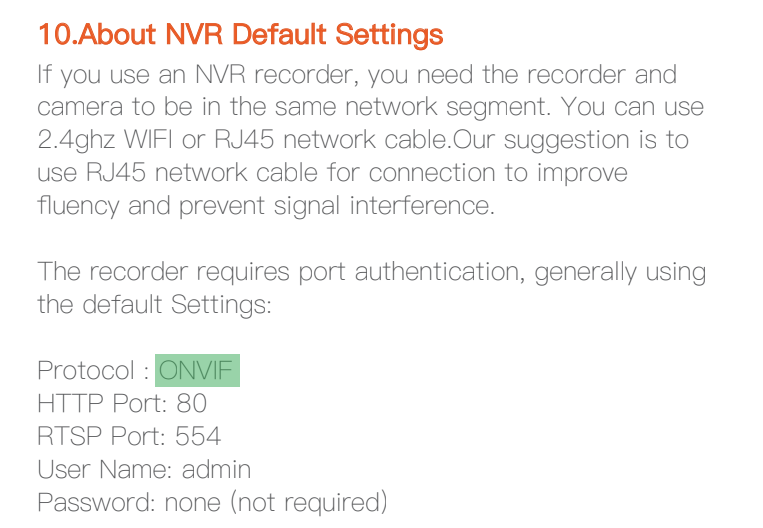
Voir doc frigate :
# Optional: connect to ONVIF camera
# to enable PTZ controls.
onvif:
# Required: host of the camera being connected to.
host: 0.0.0.0
# Optional: ONVIF port for device (default: shown below).
port: 8000
# Optional: username for login.
# NOTE: Some devices require admin to access ONVIF.
user: admin
# Optional: password for login.
password: admin
# Optional: Ignores time synchronization mismatches between the camera and the server during authentication.
# Using NTP on both ends is recommended and this should only be set to True in a "safe" environment due to the security risk it represents.
ignore_time_mismatch: False
# Optional: PTZ camera object autotracking. Keeps a moving object in
# the center of the frame by automatically moving the PTZ camera.
autotracking:
# Optional: enable/disable object autotracking. (default: shown below)
enabled: False
# Optional: calibrate the camera on startup (default: shown below)
# A calibration will move the PTZ in increments and measure the time it takes to move.
# The results are used to help estimate the position of tracked objects after a camera move.
# Frigate will update your config file automatically after a calibration with
# a "movement_weights" entry for the camera. You should then set calibrate_on_startup to False.
calibrate_on_startup: False
# Optional: the mode to use for zooming in/out on objects during autotracking. (default: shown below)
# Available options are: disabled, absolute, and relative
# disabled - don't zoom in/out on autotracked objects, use pan/tilt only
# absolute - use absolute zooming (supported by most PTZ capable cameras)
# relative - use relative zooming (not supported on all PTZs, but makes concurrent pan/tilt/zoom movements)
zooming: disabled
# Optional: A value to change the behavior of zooming on autotracked objects. (default: shown below)
# A lower value will keep more of the scene in view around a tracked object.
# A higher value will zoom in more on a tracked object, but Frigate may lose tracking more quickly.
# The value should be between 0.1 and 0.75
zoom_factor: 0.3
# Optional: list of objects to track from labelmap.txt (default: shown below)
track:
- person
# Required: Begin automatically tracking an object when it enters any of the listed zones.
required_zones:
- zone_name
# Required: Name of ONVIF preset in camera's firmware to return to when tracking is over. (default: shown below)
return_preset: home
# Optional: Seconds to delay before returning to preset. (default: shown below)
timeout: 10
# Optional: Values generated automatically by a camera calibration. Do not modify these manually. (default: shown below)
movement_weights: []
En cherchant j’ai trouvé le fabricant :
Shenzhen Ningyuanda Technology
modele TC105
sur la boite il y a la le rapport de certification FCC dans lequel il y a plein de photos sur l’électronique mais je ne pense pas que ça aide.
Apprès pour 15 euros c’était surtout pour jouer avec frigate .
Petite question subsidiaire :
Sur les events récupérés comment on fait pour récupérer l’heure : je reçois un timestamp du genre 1734371620.660276
Merci