Bonjour à tous,
Je me permets un petit post général pour savoir si il y a des trucs et astuces pour améliorer les temps de réponse de Jeedom dans le cas d’une relation télécommande → actionneur.
J’ai quelques télécommandes zigbee et je paramètre des scenarios qui en fonction de l’appui sur tel bouton, allument telle lampe, ou bascule tel switch. Ca peut aussi être un detecteur d’ouverture qui allume une lampe
Tout fonctionne bien, pas de souci de ce coté là, mais il y a toujours un petit temps de latence (<1s) qui donne une impression de non immédiateté.
Ce sont des latences qu’on ne retrouve pas (ou moins important) avec HA, avec des plugins comme zigbeelinker ou Light Group. Ceci me fait dire qu’il doit y avoir des trucs pour aller plus vite.
Avant qu’on me propose cette solution, le binding zigbee n’ets pas applicable dans mon cas (objet de ce message), car contacteur zigbee et actionneur wifi ou télécommande zigbee non compatible avec du binding, …
Coté zigbeelinker, les meilleurs perfs sont lorsqu’on joue sur la commande état d’un actionneur et pas sur la commande action
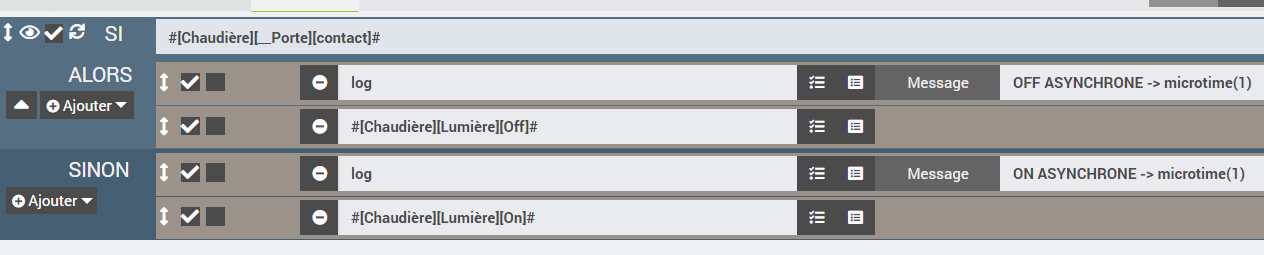
Mes scenarios sont tout simple pour la plupart : un declencheur, un SI valeur déclencheur = 1 action ON, sinon, action OFF
De votre coté, que faites vous pour optimiser ces relations déclencheur → actionneur ?
Merci de vos retours
Norbert