bonjour
Possesseur de la box jeedom Smart Z-Wave+ depuis quelques jours en remplacement d’une veraplus, je suis en train de réinclure tous les modules zwave.
Au bout d’une 20e de modules, et vers 10h30, j’ai eu un message d’erreur informant que le reseau zwave n’etait plus disponible.
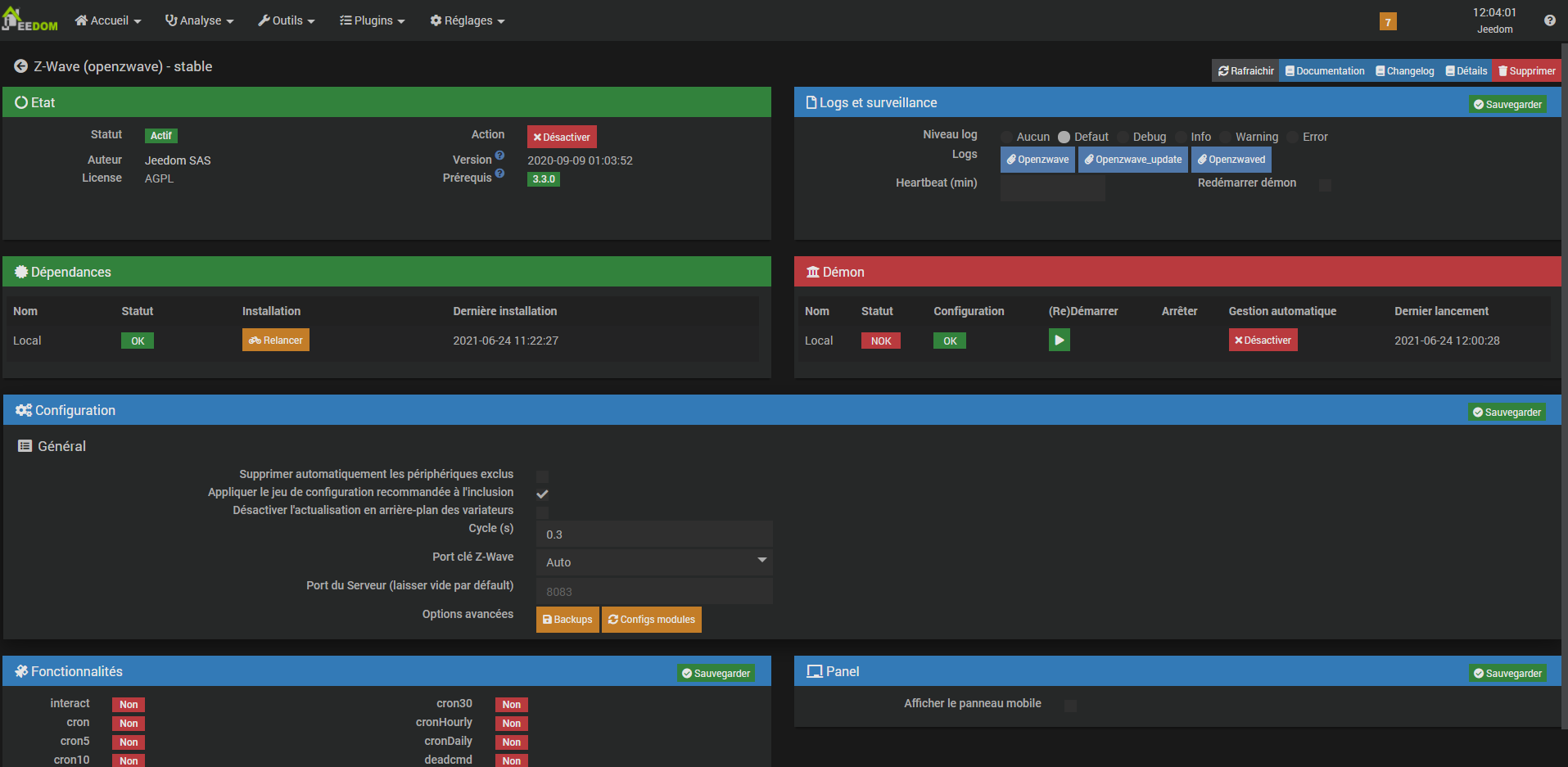
Si j’essaye de relancer le daemon openzwave, ça ne fonctionne pas.
je tente un reboot de la box: toujours en panne.
Voilà la log :
> [2021-06-22 11:09:33][ERROR] : RemoveFailedNode. (NotFound)
> [2021-06-22 11:09:39][ERROR] : RemoveFailedNode. (NotFound)
> [2021-06-22 13:10:17][ERROR] : Le noeud [Aquarium][Eclairage] (2) est présumé mort
> [2021-06-22 14:00:42][ERROR] : Le noeud [Garage][Interrupteur alarme garage] (3) est présumé mort
> [2021-06-22 13:53:19][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-22 14:56:13][ERROR] : RequestHandler Controller is busy
> [2021-06-22 14:56:13][ERROR] : RequestHandler Controller is busy
> [2021-06-22 14:56:13][ERROR] : RequestHandler Controller is busy
> [2021-06-22 14:56:13][ERROR] : RequestHandler Value not found
> [2021-06-22 17:08:07][ERROR] : Le noeud [Garage][Interrupteur alarme garage] (3) est présumé mort
> [2021-06-22 17:08:08][ERROR] : Le noeud [Garage][Interrupteur alarme garage] (3) est présumé mort
> [2021-06-22 17:08:08][ERROR] : Le noeud [Garage][Interrupteur alarme garage] (3) est présumé mort
> [2021-06-22 15:15:16][ERROR] : RemoveFailedNode, RequestNetworkUpdate. (Failed)
> [2021-06-22 17:27:22][ERROR] : Le noeud [Aquarium][Eclairage] (2) est présumé mort
> [2021-06-22 17:19:15][ERROR] : RemoveFailedNode, RequestNetworkUpdate. (Failed)
> [2021-06-22 18:35:45][ERROR] : Critical error on send_changes_async threads can only be started once
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-278560, stopped daemon 548282237408)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-278560, stopped daemon 548282237408)>
> [2021-06-23 00:14:50][ERROR] : Critical error on send_changes_async threads can only be started once
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-377996, stopped daemon 548248404448)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-377996, stopped daemon 548248404448)>
> [2021-06-23 00:39:12][ERROR] : Critical error on send_changes_async threads can only be started once
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-384816, stopped daemon 548239487456)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-384816, stopped daemon 548239487456)>
> [2021-06-23 01:52:44][ERROR] : Critical error on send_changes_async threads can only be started once
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-445177, stopped daemon 548239487456)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-445177, stopped daemon 548239487456)>
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-501275, stopped daemon 548248404448)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-501275, stopped daemon 548248404448)>
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-582542, stopped daemon 548239487456)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-582542, stopped daemon 548239487456)>
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-597001, stopped daemon 547742544352)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-597001, stopped daemon 547742544352)>
> [2021-06-23 13:00:56][ERROR] : Le noeud [Home DJ][Caméra DJ] (17) est présumé mort
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-657246, stopped daemon 547742544352)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-657246, stopped daemon 547742544352)>
> [2021-06-23 13:09:08][ERROR] : Le noeud [Home DJ][Caméra DJ] (17) est présumé mort
> [2021-06-23 11:11:58][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-23 11:16:40][ERROR] : RemoveFailedNode, RequestNetworkUpdate. (Failed)
> [2021-06-23 11:16:44][ERROR] : RemoveFailedNode, RequestNetworkUpdate. (Failed)
> [2021-06-23 11:31:30][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-23 11:32:56][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-23 14:48:38][ERROR] : RemoveFailedNode, RequestNetworkUpdate. (Failed)
> [2021-06-23 19:26:35][ERROR] : Le noeud [Bassin][Pompe Filtre 1 old] (7) est présumé mort
> [2021-06-23 19:27:18][ERROR] : Le noeud [Aquarium][Eclairage] (2) est présumé mort
> [2021-06-23 19:30:23][ERROR] : Le noeud [Bassin][Pompe Filtre 1 old] (7) est présumé mort
> [2021-06-23 19:30:25][ERROR] : Le noeud [Bassin][Pompe Filtre 1 old] (7) est présumé mort
> [2021-06-23 19:30:44][ERROR] : Le noeud [Bassin][Pompe Filtre 1 old] (7) est présumé mort
> [2021-06-23 21:00:22][ERROR] : Le noeud [Bassin][Pompe Filtre 1 old] (7) est présumé mort
> [2021-06-23 23:00:10][ERROR] : Le noeud [Cinéma][Caméra cinéma] (15) est présumé mort
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-161551, stopped daemon 548036125152)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-161551, stopped daemon 548036125152)>
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-191586, stopped daemon 548078088672)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-191586, stopped daemon 548078088672)>
> [2021-06-24 02:44:42][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-24 03:43:37][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-24 06:00:12][ERROR] : Le noeud [Cinéma][Caméra cinéma] (15) est présumé mort
> [2021-06-24 04:12:49][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-24 04:14:49][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-24 04:17:33][ERROR] : Critical error on send_changes_async threads can only be started once
> [2021-06-24 04:19:14][ERROR] : Critical error on send_changes_async threads can only be started once
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-309753, stopped daemon 548036125152)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-309753, stopped daemon 548036125152)>
> Unhandled exception in thread started by <bound method _Timer.__bootstrap of <_Timer(Thread-386214, stopped daemon 547541217760)>>
> Traceback (most recent call last):
> File "/usr/lib/python2.7/threading.py", line 774, in __bootstrap
> self.__bootstrap_inner()
> File "/usr/lib/python2.7/threading.py", line 789, in __bootstrap_inner
> del _limbo[self]
> KeyError: <_Timer(Thread-386214, stopped daemon 547541217760)>
> [2021-06-24 08:20:20][ERROR] : RemoveFailedNode, RequestNetworkUpdate. (Failed)
> [2021-06-24 10:24:53][ERROR] : Le noeud 2 est présumé mort
> [2021-06-24 10:25:17][ERROR] : Le noeud [Bassin][Lampe pompe UV] (6) est présumé mort
> [2021-06-24 10:25:46][ERROR] : Le noeud [Bassin][Pompe Filtre 1 old] (7) est présumé mort
> [2021-06-24 10:31:09][ERROR] : Le noeud [Bassin][Pompe Filtre 1 old] (7) est présumé mort
> [2021-06-24 10:31:45][ERROR] : Le noeud 2 est présumé mort
> [2021-06-24 08:37:54][ERROR] : No USB Z-Wave Stick detected
> [2021-06-24 10:38:23][ERROR] : Impossible de lancer le démon openzwave, relancer le démon en debug et vérifiez la log
> [2021-06-24 08:38:40][ERROR] : No USB Z-Wave Stick detected
> [2021-06-24 10:39:08][ERROR] : Impossible de lancer le démon openzwave, relancer le démon en debug et vérifiez la log
> [2021-06-24 10:39:18][ERROR] : Erreur sur la fonction deamon_start du plugin : Vous devez attendre au moins 45 secondes entre deux lancements du démon. Dernier lancement : 2021-06-24 10:38:37
> [2021-06-24 08:39:53][ERROR] : No USB Z-Wave Stick detected
> [2021-06-24 10:40:22][ERROR] : Impossible de lancer le démon openzwave, relancer le démon en debug et vérifiez la log
> [2021-06-24 08:40:42][ERROR] : No USB Z-Wave Stick detected
> [2021-06-24 10:41:11][ERROR] : Impossible de lancer le démon openzwave, relancer le démon en debug et vérifiez la log
Merci pour votre aide