Au final avec la cle usb debian live et la bonne méthode pour télécharger les drivers pour le wifi et trouver la bonne adresse IP du pc qu’à besoin de voir l’aspirateur. Bon maintenant je trouve pas le robot sur mon réseau
Edit : c’est bon. J’ai accès à l’interface. Quelle aventure
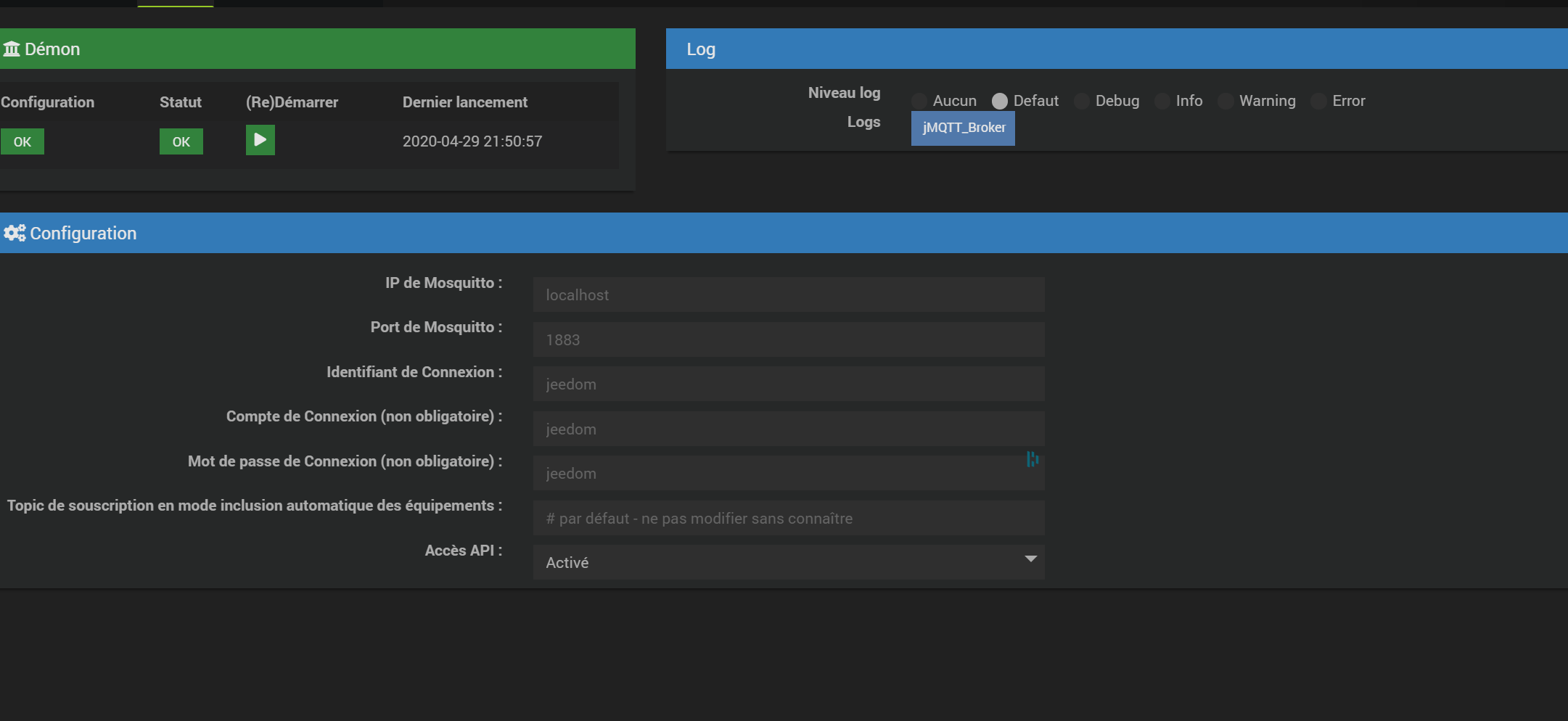
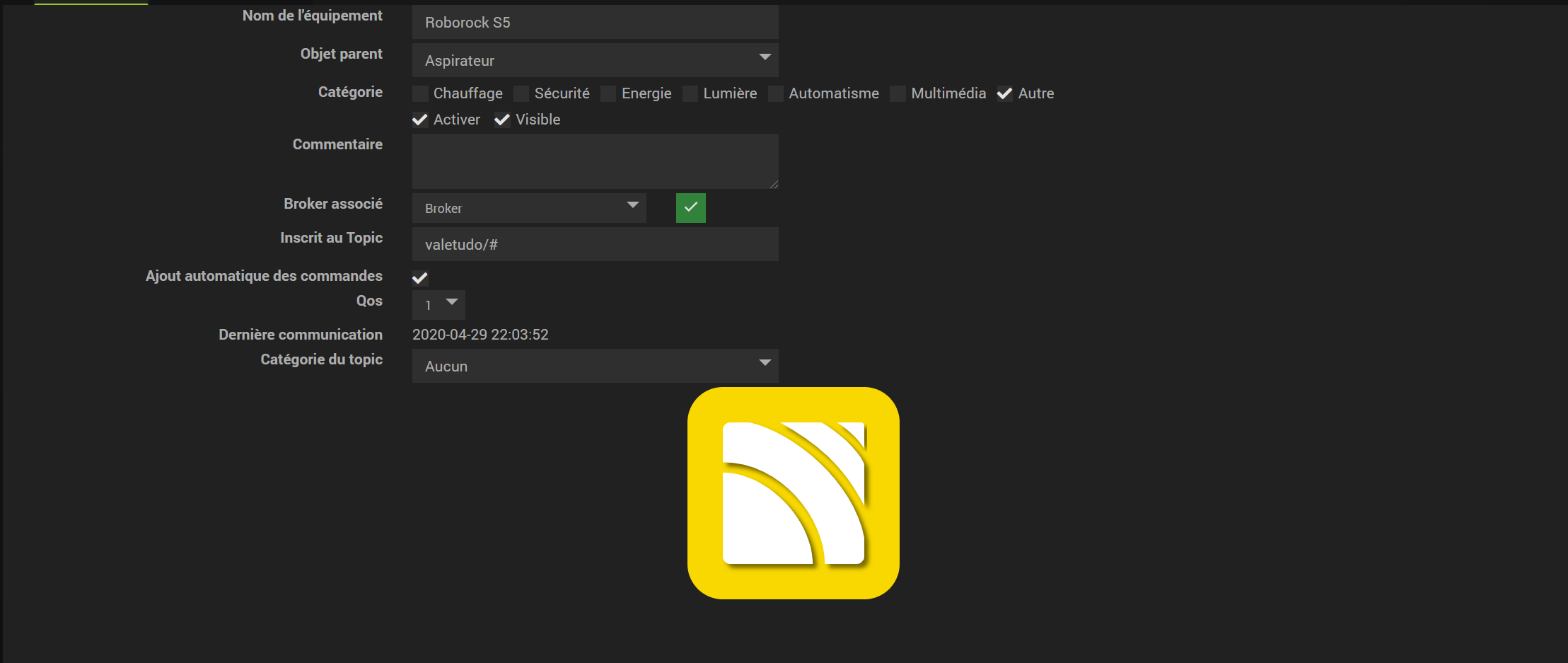
J’ai un soucis car les commandes ne se créent pas dans JMQTT … J’ai suivi la doc donc modifier le fichier avec l’outil nano … Cela peut venir de quoi ? Je note qu’il est indiqué dans la documentation que l’onglet broker se rempli tout seul mais moi il est vide
C’est bon j’ai mis n’importe quoi dans le fichier et j’ai redémarré le robot qui m’a remis le fichier d’origine
EDIT : mais toujours pas de commande créés … Y-a-t il un lien entre ce que l’on met dans le json et le broker / équipement que l’on créé dans le plugin ?
Si, je penses que le fichier de config que tu avais en exemple ne prenait pas en compte les zones de nettoyages. Si tu créé une zone de nettoyage il l’enregistre au début du fichier config.json comme ceci :
« areas »: [], juste avant la config générale de l’aspirateur.
En tout cas cool que cela fonctionne chez toi maintenant.
Bonjour
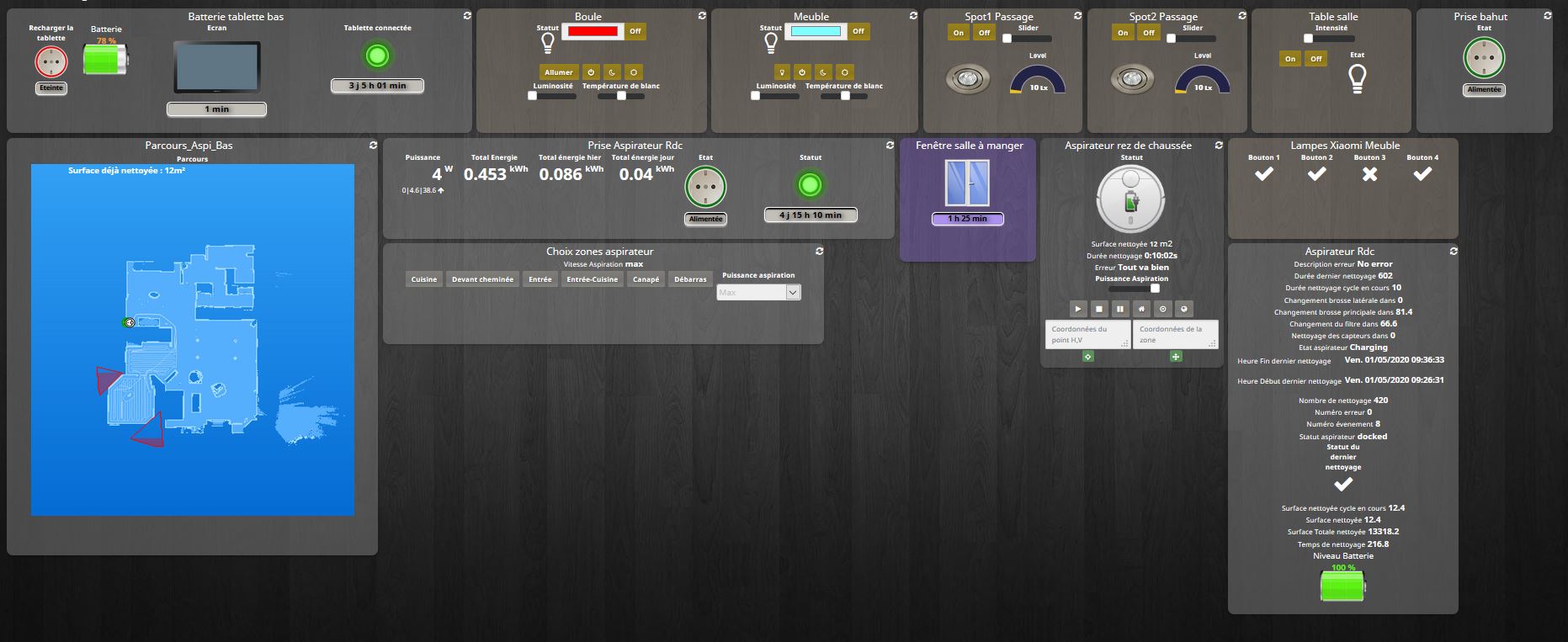
J’avance dans l’utilisation de ce système. Est-ce que quelqu’un a les commandes de la surface en cours de nettoyage et de la durée du nettoyage en cours ? J’ai bien les informations concernant le dernier nettoyage mais pas sur le nettoyage en cours …
Merci
Voilà ce que cela donne sur le dashboard lors d’un nettoyage il y a en haut de la carte la surface nettoyée en temps réel, l’équipement « Parcours_Aspi_Bas » est masqué et et désactivé lorsque l’aspirateur est en charge.