c’est quoi ta commande ?
je n’ai plus l’état qd je l’ai fais
m’ais l’ip est bizarre non ? « INFO:miio.updater:Serving on 0.0.0.0:34501, timeout 10 »
Bon c’est en cours …
En fait la voix en chinois devait m’engueuler car le robot n’était pas sur sa base (il est sous un meuble donc je le sors pour faire les manips)
J’ai fais la manip depuis un rpi connecté en ethernet à mon réseau, pour ça j’ai fais 2 modifs
- j’ai ajouté un param ip après update-firmware, c’est indiqué sur le wiki valetudo et je pense que c’est nécessaire si tu as plusieurs interface
mirobo --ip 192.168.8.1 --token xxxxxxxxxxxxxxxxxxxx update-firmware --ip 192.168.8.233 /home/pi/roborock/v11_003468.pkg
- sur mon rpi, j’ai ajouté ça en bas du fichier /etc/dhcpcd.conf pour rendre le wifi plus prioritaire
interface eth0
metric 300
interface wlan0
metric 200
Note : pour se connecter en wifi depuis un rpi en ssh, Puis network option / Wifi
sudo raspi-config
Avec la commande suivante pour lister le SSID sans trop galéré
sudo iwlist wlan0 scan | grep ESSID
2 « J'aime »
Hello, je suis également passé sur Valetudo… le tuto est très bien expliqué, merci ![]()
En revanche, attention, pas de persistant data pour le v1
On verra à l’usage !!!
j’ai vu ça aussi.
Je pense qu’on a la même chose avec valetudo RE
J’ai testé les deux et c’est pareil…
Vraiment dommage car c’est l’intérêt de cette option qui m’a fait franchi le cap… J’espère que la carte ne tournera pas !
T’arrives à exclure une zone où mettre un barrière ?
J’ai un erreur 501 lors de l’enregistrement…
Merci pour vos messages, je suis en train de modifier le tuto pour intégrer les premiers pas avec JMQTT, une bonne partie est faite, beaucoup reste a faire, désolé pour le retard pris jusqu’ici 
Ah malheureusement j’imagine que coté matériel il est un peu plus limité que le S5 et ne peut simplement pas intégrer cette fonction … le nettoyage zone et spot fonctionne tout de même ? pas de rotation de carte intempestive ?
Merci de vos retours 
Malheureuse le confinement ainsi que le mauvais temps fait qu’on ne l’utilise pas… Donc aucun recule pour le moment !
Perso de mon coté, j’ai avancé sur l’intégration de la carte ![]()
pour le moment j’arrive à avoir ça sur telegram ![]()
C’est envoyé environ 1 min après que le robot soit retournée à son dock

je finis ça au propre et je met plus d’infos ici
1 « J'aime »
Bien joué ça oui je veux bien ton retour
Donc pour avoir les cartes de nettoyage sur Jeedom, il faut installer ICantBelieveItsNotValetudo : GitHub - Hypfer/ICantBelieveItsNotValetudo: A Valetudo companion service which renders maps to pngs
Donc sur votre système hébergeant jeedom:
git clone https://github.com/Hypfer/ICantBelieveItsNotValetudo.git
cd ICantBelieveItsNotValetudo
npm install
Ensuite on a 2 solutions pour récupérer la carte: un script python ou un webserver
Le webserver permet d’avoir la visualisation en temps réel du robot. Très joli mais j’avais besoin d’un fichier png pour pouvoir l’envoyer par Telegram.
Ce qui nous amène au script python. Ce dernier est situé dans tools/mqtt2img.py
Pour exécuter le script il faut installer paho-mqtt et python-pil
apt install python-pil
pip install paho-mqtt
Personnellement j’ai aussi du installer wheel et un autre package.
Ensuite on exécute ce script
./tools/mqtt2img.py 192.168.0.100 rockrobo
l’ip correspond à l’adresse du broker mqtt
le dernier param (rockrobo) correspond à l’identifier qui est écrit dans le config.json sur le robot (rockrobo est la valeur par défaut)
et normalement un fichier map.png est généré. On peut appeler ce script quand on veut, il renverra la map en cours.
Maintenant sous jeedom, il faut le plugin telegram, jmqtt et script
On crée un nouveau script qui va générer la map et la copier dans un répertoire facile d’accès depuis jeedom

#!/bin/bash
cd /home/digaboy/ICantBelieveItsNotValetudo/tools/
./mqtt2img.py 192.168.0.100 rockrobo -o /var/www/html/data/img/map.png
Et ensuite un nouveau scénario
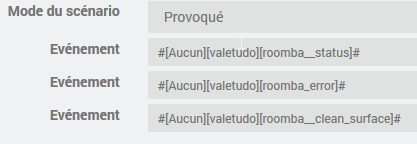
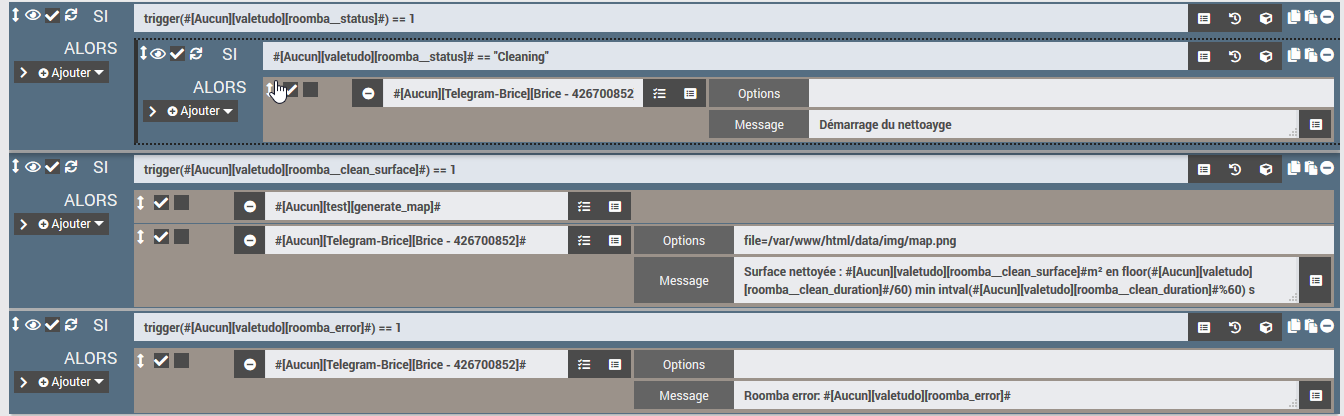
Et voila normalement, vous recevrez un notif quand le nettoyage commence et une fois que le nettoyage est finie
Voila !
1 « J'aime »
Joli ca, j’essaierai tout ça et j’inclurai au tuto en te créditant quand je l’aurai terminé  merci beaucoup !
merci beaucoup !
Comme je vois que tu as l’air d’etre un utilisateur avancé de Jeedom je me permet de te demander, as tu déjà créé des commandes de type liste ?
En fait pour finir le tuto j’aimerai montrer un exemple de configuration, mais je bloque sur les modes de puissance, individuellement j’arrive a les avoir grâce aux commandes suivantes :
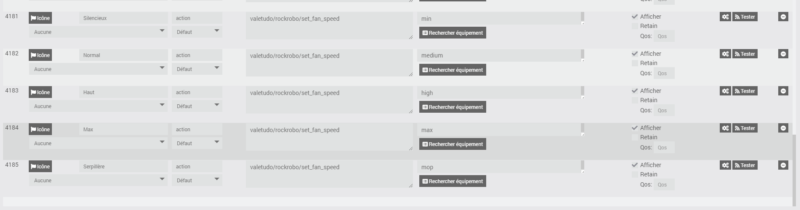
Mais lorsque j’essaie de créer une commande de type liste avec ces valeurs je n’ai pas de menu déroulant, j’ai essayé différentes syntaxes, j’avais trouvé sur un forum des infos qui allaient dans le sens : Nom 1ère commande | valeur 1; Nom 2de commande | valeur 2; etc... mais cela ne fonctionne pas ici et je ne trouve pas de documentation sur cette fonction, aurais-tu une idée ?

Non désolé j’ai jamais bossé avec les listes
énorme ! merci beaucoup !
Bon visiblement j’ai plus d’accès SSH a mon jeedom, du coup je tenterais ICantBelieveItsNotValetudo la semaine prochaine puisque je dois recevoir mon NUC vendredi prochain et c’est lui qui hébergera mon nouveau Jeedom en remplacement de mon vieux serveur
Petite question : tu utilises valetudo re ou valetudo de Hypfer ?
Pour ceux qui sont sur windows 10 vous avez l’application Debian qui vous permet d’avoir un sous système linux sur windows et donc vous permet de faire les manipulations
Si j’ai bien lu, on ne sait pas si la carte tourne ou pas ?
C’est vraiment ce qui me ferait basculer.