Partie A Code arduino :
/*
ESP32-CAM 2 axis servo pan tilt using Canvas clicked
Author : ChungYi Fu (Kaohsiung, Taiwan) 2021-7-3 22:00
https://www.facebook.com/francefu
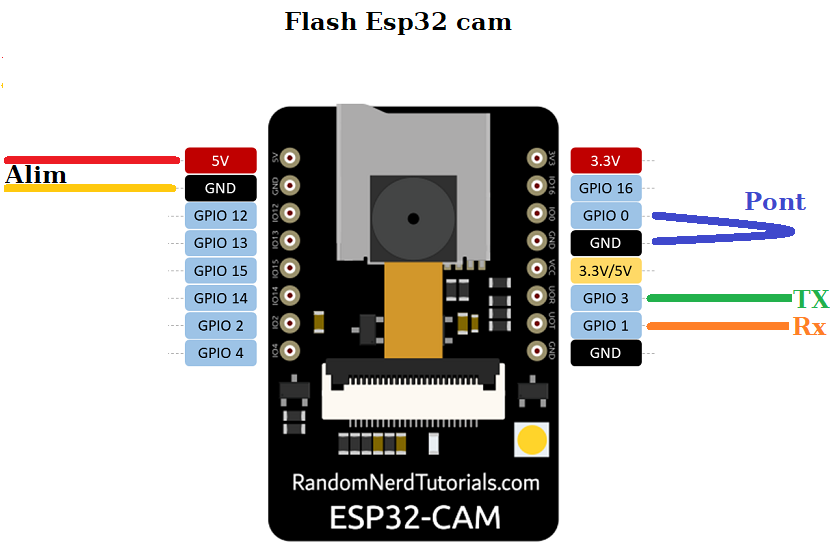
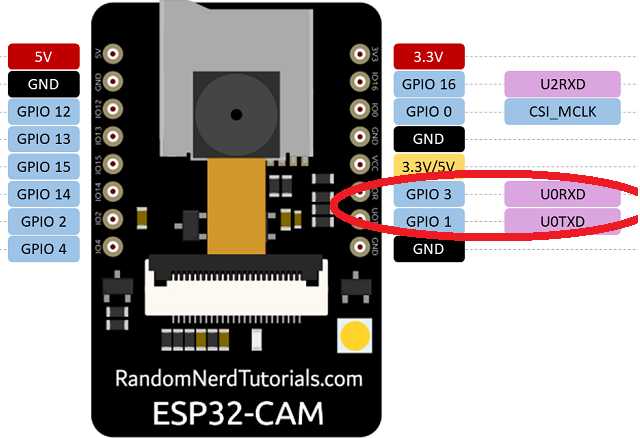
Servo1(水平旋轉) -> gpio 1 (伺服馬達與ESP32-CAM共地外接電源)
Servo2(垂直旋轉) -> gpio 3 (伺服馬達與ESP32-CAM共地外接電源)
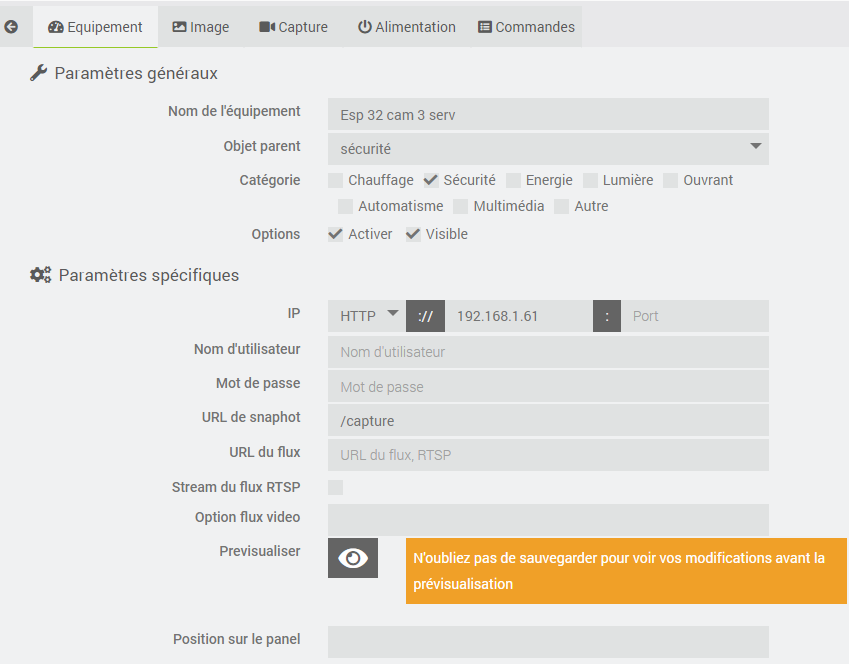
http://192.168.xxx.xxx //網頁首頁管理介面
http://192.168.xxx.xxx:81/stream //取得串流影像 網頁語法 <img src="http://192.168.xxx.xxx:81/stream">
http://192.168.xxx.xxx/capture //取得影像 網頁語法 <img src="http://192.168.xxx.xxx/capture">
http://192.168.xxx.xxx/status //取得影像狀態值
//自訂指令格式 http://192.168.xxx.xxx/control?cmd=P1;P2;P3;P4;P5;P6;P7;P8;P9
http://192.168.xxx.xxx/control?ip //IP
http://192.168.xxx.xxx/control?mac //MAC
http://192.168.xxx.xxx/control?restart //重啟電源
http://192.168.xxx.xxx/control?digitalwrite=pin;value //數位輸出
http://192.168.xxx.xxx/control?analogwrite=pin;value //類比輸出
http://192.168.xxx.xxx/control?digitalread=pin //數位讀取
http://192.168.xxx.xxx/control?analogread=pin //類比讀取
http://192.168.xxx.xxx/control?touchread=pin //觸碰讀取
http://192.168.xxx.xxx/control?resetwifi=ssid;password //重設Wi-Fi網路
http://192.168.xxx.xxx/control?restart //重啟ESP32-CAM
http://192.168.xxx.xxx/control?flash=value //閃光燈 value= 0~255
http://192.168.xxx.xxx/control?servo=pin;value //伺服馬達 value= 0~180
http://192.168.xxx.xxx/control?relay=pin;value //繼電器 value = 0, 1
http://192.168.xxx.xxx/control?servo2=valueH;valueV //伺服馬達
官方指令格式 http://192.168.xxx.xxx/control?var=***&val=***
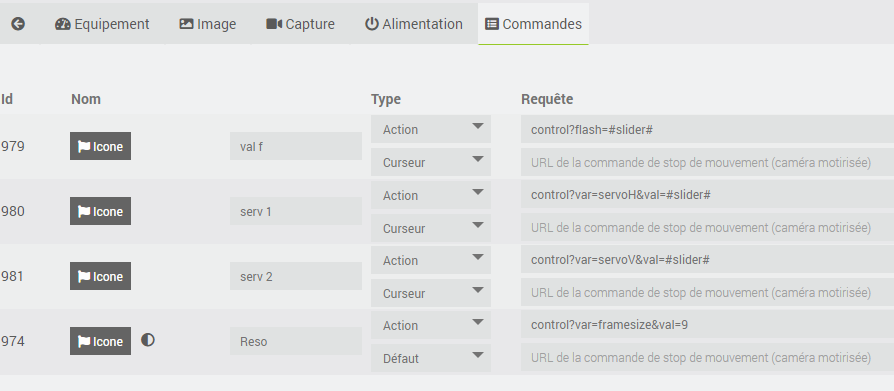
http://192.168.xxx.xxx/control?var=framesize&val=value //解析度 value = 10->UXGA(1600x1200), 9->SXGA(1280x1024), 8->XGA(1024x768) ,7->SVGA(800x600), 6->VGA(640x480), 5 selected=selected->CIF(400x296), 4->QVGA(320x240), 3->HQVGA(240x176), 0->QQVGA(160x120), 11->QXGA(2048x1564 for OV3660)
http://192.168.xxx.xxx/control?var=quality&val=value //畫質 value = 10 ~ 63
http://192.168.xxx.xxx/control?var=brightness&val=value //亮度 value = -2 ~ 2
http://192.168.xxx.xxx/control?var=contrast&val=value //對比 value = -2 ~ 2
http://192.168.xxx.xxx/control?var=saturation&val=value //飽和度 value = -2 ~ 2
http://192.168.xxx.xxx/control?var=special_effect&val=value //特效 value = 0 ~ 6
http://192.168.xxx.xxx/control?var=hmirror&val=value //水平鏡像 value = 0 or 1
http://192.168.xxx.xxx/control?var=vflip&val=value //垂直翻轉 value = 0 or 1 // value = 0 or 1
http://192.168.xxx.xxx/control?var=flash&val=value //閃光燈 value = 0 ~ 255
http://192.168.xxx.xxx/control?var=servoH&val=value //伺服馬達1 value= 0~180
http://192.168.xxx.xxx/control?var=servoV&val=value //伺服馬達2 value= 0~180
*/
//輸入WIFI連線帳號密碼
const char* ssid = "SSID WIFI";
const char* password = "PASS WIFI";
/*
//輸入AP端連線帳號密碼 http://192.168.4.1
const char* apssid = "esp32-cam";
const char* appassword = "12345678"; //AP密碼至少要8個字元以上
*/
int angle1Value1 = 90; //90度
int angle1Value2 = 90; //90度
#include <WiFi.h>
#include <esp32-hal-ledc.h> //用於控制伺服馬達
#include "soc/soc.h" //用於電源不穩不重開機
#include "soc/rtc_cntl_reg.h" //用於電源不穩不重開機
//官方函式庫
#include "esp_camera.h" //視訊函式庫
#include "esp_http_server.h" //HTTP Server函式庫
#include "img_converters.h" //影像格式轉換函式庫
String Feedback=""; //自訂指令回傳客戶端訊息
//自訂指令參數值
String Command="";
String cmd="";
String P1="";
String P2="";
String P3="";
String P4="";
String P5="";
String P6="";
String P7="";
String P8="";
String P9="";
//自訂指令拆解狀態值
byte ReceiveState=0;
byte cmdState=1;
byte strState=1;
byte questionstate=0;
byte equalstate=0;
byte semicolonstate=0;
typedef struct {
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
httpd_handle_t stream_httpd = NULL;
httpd_handle_t camera_httpd = NULL;
//ESP32-CAM模組腳位設定
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
void setup() {
WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); //關閉電源不穩就重開機的設定
Serial.begin(115200);
Serial.setDebugOutput(true); //開啟診斷輸出
Serial.println();
//視訊組態設定 https://github.com/espressif/esp32-camera/blob/master/driver/include/esp_camera.h
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
//
// WARNING!!! PSRAM IC required for UXGA resolution and high JPEG quality
// Ensure ESP32 Wrover Module or other board with PSRAM is selected
// Partial images will be transmitted if image exceeds buffer size
//
// if PSRAM IC present, init with UXGA resolution and higher JPEG quality
// for larger pre-allocated frame buffer.
if(psramFound()){ //是否有PSRAM(Psuedo SRAM)記憶體IC
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
//視訊初始化
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
ESP.restart();
}
//可自訂視訊框架預設大小(解析度大小)
sensor_t * s = esp_camera_sensor_get();
// initial sensors are flipped vertically and colors are a bit saturated
if (s->id.PID == OV3660_PID) {
s->set_vflip(s, 1); // flip it back
s->set_brightness(s, 1); // up the brightness just a bit
s->set_saturation(s, -2); // lower the saturation
}
//可動態改變視訊框架大小(解析度大小)
s->set_framesize(s, FRAMESIZE_QVGA); //UXGA|SXGA|XGA|SVGA|VGA|CIF|QVGA|HQVGA|QQVGA
//s->set_vflip(s, 1); //垂直翻轉
//s->set_hmirror(s, 1); //水平鏡像
//Servo _____________________________________________________________________________
ledcAttachPin(1, 13);
ledcSetup(13, 50, 16);
servo_rotate(13, angle1Value1);
delay(1000);
ledcAttachPin(3, 14);
ledcSetup(14, 50, 16);
servo_rotate(14, angle1Value2);
delay(1000);
//閃光燈(GPIO4)
ledcAttachPin(4, 4);
ledcSetup(4, 5000, 8);
// WiFi.mode(WIFI_AP_STA); //其他模式 WiFi.mode(WIFI_AP); WiFi.mode(WIFI_STA);
//指定Client端靜態IP
//WiFi.config(IPAddress(192, 168, 201, 100), IPAddress(192, 168, 201, 2), IPAddress(255, 255, 255, 0));
for (int i=0;i<2;i++) {
WiFi.begin(ssid, password); //執行網路連線
delay(1000);
Serial.println("");
Serial.print("Connecting to ");
Serial.println(ssid);
//
long int StartTime=millis();
while (WiFi.status() != WL_CONNECTED) {
delay(500);
if ((StartTime+5000) < millis()) break; //等待10秒連線
}
}
/*
if (WiFi.status() == WL_CONNECTED) { //若連線成功
WiFi.softAP((WiFi.localIP().toString()+"_"+(String)apssid).c_str(), appassword); //設定SSID顯示客戶端IP
Serial.println("");
Serial.println("STAIP address: ");
Serial.println(WiFi.localIP());
Serial.println("");
for (int i=0;i<5;i++) { //若連上WIFI設定閃光燈快速閃爍
ledcWrite(4,10);
delay(200);
ledcWrite(4,0);
delay(200);
}
break;
}
}
if (WiFi.status() != WL_CONNECTED) { //若連線失敗
WiFi.softAP((WiFi.softAPIP().toString()+"_"+(String)apssid).c_str(), appassword);
for (int i=0;i<2;i++) { //若連不上WIFI設定閃光燈慢速閃爍
ledcWrite(4,10);
delay(1000);
ledcWrite(4,0);
delay(1000);
}
}
//指定AP端IP
//WiFi.softAPConfig(IPAddress(192, 168, 4, 1), IPAddress(192, 168, 4, 1), IPAddress(255, 255, 255, 0));
Serial.println("");
Serial.println("APIP address: ");
Serial.println(WiFi.softAPIP());
Serial.println("");
*/
startCameraServer();
//設定閃光燈為低電位
pinMode(4, OUTPUT);
digitalWrite(4, LOW);
}
void loop() {
}
void servo_rotate(int channel, int angle) {
int val = 7864-angle*34.59;
if (val > 7864)
val = 7864;
else if (val < 1638)
val = 1638;
ledcWrite(channel, val);
}
static size_t jpg_encode_stream(void * arg, size_t index, const void* data, size_t len){
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if(!index){
j->len = 0;
}
if(httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK){
return 0;
}
j->len += len;
return len;
}
//影像截圖
static esp_err_t capture_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
httpd_resp_set_type(req, "image/jpeg");
httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
size_t fb_len = 0;
if(fb->format == PIXFORMAT_JPEG){
fb_len = fb->len;
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
} else {
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk)?ESP_OK:ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
fb_len = jchunk.len;
}
esp_camera_fb_return(fb);
return res;
}
//影像串流
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
while(true){
fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if(!jpeg_converted){
Serial.println("JPEG compression failed");
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(fb){
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
} else if(_jpg_buf){
free(_jpg_buf);
_jpg_buf = NULL;
}
if(res != ESP_OK){
break;
}
}
return res;
}
//指令參數控制
static esp_err_t cmd_handler(httpd_req_t *req){
char* buf; //存取網址後帶的參數字串
size_t buf_len;
char variable[128] = {0,}; //存取參數var值
char value[128] = {0,}; //存取參數val值
String myCmd = "";
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "var", variable, sizeof(variable)) == ESP_OK &&
httpd_query_key_value(buf, "val", value, sizeof(value)) == ESP_OK) {
}
else {
myCmd = String(buf); //如果非官方格式不含var, val,則為自訂指令格式
}
}
free(buf);
} else {
httpd_resp_send_404(req);
return ESP_FAIL;
}
Feedback="";Command="";cmd="";P1="";P2="";P3="";P4="";P5="";P6="";P7="";P8="";P9="";
ReceiveState=0,cmdState=1,strState=1,questionstate=0,equalstate=0,semicolonstate=0;
if (myCmd.length()>0) {
myCmd = "?"+myCmd; //網址後帶的參數字串轉換成自訂指令格式
for (int i=0;i<myCmd.length();i++) {
getCommand(char(myCmd.charAt(i))); //拆解自訂指令參數字串
}
}
if (cmd.length()>0) {
Serial.println("");
//Serial.println("Command: "+Command);
Serial.println("cmd= "+cmd+" ,P1= "+P1+" ,P2= "+P2+" ,P3= "+P3+" ,P4= "+P4+" ,P5= "+P5+" ,P6= "+P6+" ,P7= "+P7+" ,P8= "+P8+" ,P9= "+P9);
Serial.println("");
//自訂指令區塊 http://192.168.xxx.xxx/control?cmd=P1;P2;P3;P4;P5;P6;P7;P8;P9
if (cmd=="your cmd") {
// You can do anything
// Feedback="<font color=\"red\">Hello World</font>"; //可為一般文字或HTML語法
} else if (cmd=="ip") { //查詢APIP, STAIP
Feedback="AP IP: "+WiFi.softAPIP().toString();
Feedback+="<br>";
Feedback+="STA IP: "+WiFi.localIP().toString();
} else if (cmd=="mac") { //查詢MAC位址
Feedback="STA MAC: "+WiFi.macAddress();
} else if (cmd=="restart") { //重設WIFI連線
ESP.restart();
} else if (cmd=="digitalwrite") { //數位輸出
ledcDetachPin(P1.toInt());
pinMode(P1.toInt(), OUTPUT);
digitalWrite(P1.toInt(), P2.toInt());
} else if (cmd=="digitalread") { //數位輸入
Feedback=String(digitalRead(P1.toInt()));
} else if (cmd=="analogwrite") { //類比輸出
if (P1=="4") {
ledcAttachPin(4, 4);
ledcSetup(4, 5000, 8);
ledcWrite(4,P2.toInt());
} else {
ledcAttachPin(P1.toInt(), 9);
ledcSetup(9, 5000, 8);
ledcWrite(9,P2.toInt());
}
}
else if (cmd=="analogread") { //類比讀取
Feedback=String(analogRead(P1.toInt()));
} else if (cmd=="touchread") { //觸碰讀取
Feedback=String(touchRead(P1.toInt()));
} else if (cmd=="restart") { //重啟電源
ESP.restart();
} else if (cmd=="flash") { //閃光燈
ledcAttachPin(4, 4);
ledcSetup(4, 5000, 8);
int val = P1.toInt();
ledcWrite(4,val);
} else if (cmd=="relay") { //繼電器
pinMode(P1.toInt(), OUTPUT);
digitalWrite(P1.toInt(), P2.toInt());
} else if (cmd=="resetwifi") { //重設網路連線
for (int i=0;i<2;i++) {
WiFi.begin(P1.c_str(), P2.c_str());
Serial.print("Connecting to ");
Serial.println(P1);
long int StartTime=millis();
while (WiFi.status() != WL_CONNECTED) {
delay(500);
if ((StartTime+5000) < millis()) break;
}
Serial.println("");
Serial.println("STAIP: "+WiFi.localIP().toString());
Feedback="STAIP: "+WiFi.localIP().toString();
if (WiFi.status() == WL_CONNECTED) {
WiFi.softAP((WiFi.localIP().toString()+"_"+P1).c_str(), P2.c_str());
for (int i=0;i<2;i++) { //若連不上WIFI設定閃光燈慢速閃爍
ledcWrite(4,10);
delay(300);
ledcWrite(4,0);
delay(300);
}
break;
}
}
}
else if (cmd=="servo") {
ledcAttachPin(P1.toInt(), 6);
ledcSetup(6, 50, 16);
servo_rotate(6, P2.toInt());
delay(100);
}
//-----------------------------------------------------------------
else if (cmd=="servo2") {
angle1Value1 = P1.toInt();
ledcAttachPin(1, 13);
ledcSetup(13, 50, 16);
servo_rotate(13, angle1Value1);
delay(200);
angle1Value2 = P2.toInt();
ledcAttachPin(3, 14);
ledcSetup(14, 50, 16);
servo_rotate(14, angle1Value2);
delay(200);
Serial.println("servoH="+String(P1.toInt()));
Serial.println("servoV="+String(P2.toInt()));
}
else {
Feedback="Command is not defined";
}
if (Feedback=="") Feedback=Command; //若沒有設定回傳資料就回傳Command值
const char *resp = Feedback.c_str();
httpd_resp_set_type(req, "text/html"); //設定回傳資料格式
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*"); //允許跨網域讀取
return httpd_resp_send(req, resp, strlen(resp));
}
else {
//官方指令區塊,也可在此自訂指令 http://192.168.xxx.xxx/control?var=xxx&val=xxx
int val = atoi(value);
sensor_t * s = esp_camera_sensor_get();
int res = 0;
if(!strcmp(variable, "framesize")) {
if(s->pixformat == PIXFORMAT_JPEG)
res = s->set_framesize(s, (framesize_t)val);
}
else if(!strcmp(variable, "quality")) res = s->set_quality(s, val);
else if(!strcmp(variable, "contrast")) res = s->set_contrast(s, val);
else if(!strcmp(variable, "brightness")) res = s->set_brightness(s, val);
else if(!strcmp(variable, "hmirror")) res = s->set_hmirror(s, val);
else if(!strcmp(variable, "vflip")) res = s->set_vflip(s, val);
else if(!strcmp(variable, "flash")) {
ledcAttachPin(4, 4);
ledcSetup(4, 5000, 8);
ledcWrite(4,val);
}
else if(!strcmp(variable, "servoH")) {
angle1Value1 = val;
ledcAttachPin(1, 13); //------------------------------------------------------
ledcSetup(13, 50, 16);
servo_rotate(13, angle1Value1);
delay(100);
Serial.println("servoH="+String(angle1Value1));
}
else if(!strcmp(variable, "servoV")) {
angle1Value2 = val;
ledcAttachPin(3, 14);
ledcSetup(14, 50, 16);
servo_rotate(14, angle1Value2);
delay(100);
Serial.println("servoV="+String(angle1Value2));
}
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
if (buf) {
Feedback = String(buf);
const char *resp = Feedback.c_str();
httpd_resp_set_type(req, "text/html");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, resp, strlen(resp)); //回傳參數字串
}
else {
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
}
}
//顯示視訊參數狀態(須回傳json格式載入初始設定)
static esp_err_t status_handler(httpd_req_t *req){
static char json_response[1024];
sensor_t * s = esp_camera_sensor_get();
char * p = json_response;
*p++ = '{';
p+=sprintf(p, "\"flash\":%d,", 0);
p+=sprintf(p, "\"servoH\":%d,", angle1Value1);
p+=sprintf(p, "\"servoV\":%d,", angle1Value2);
p+=sprintf(p, "\"framesize\":%u,", s->status.framesize);
p+=sprintf(p, "\"quality\":%u,", s->status.quality);
p+=sprintf(p, "\"brightness\":%d,", s->status.brightness);
p+=sprintf(p, "\"contrast\":%d,", s->status.contrast);
p+=sprintf(p, "\"hmirror\":%u,", s->status.hmirror);
p+=sprintf(p, "\"vflip\":%u", s->status.vflip);
*p++ = '}';
*p++ = 0;
httpd_resp_set_type(req, "application/json");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, json_response, strlen(json_response));
}