Élément supplémentaire pour ta réflexion : même si plusieurs modèles sont donnés pour pouvoir franchir des pentes pareilles, les conditions du moment (humidité, feuilles mortes,…) peuvent diminuer l’adhérence et empêcher la grimpe. J’ai vu (chez Husq je crois) une brosse achetable en option et fixable sur les roues de façon à en conserver l’adhérence d’origine.
Certains constructeurs/modèles donnent aussi la possibilité d’acheter des roues plus ou moins crantées en option.
J’ai effectivement vu ce genre d’accessoire sur Ama…. A priori les commentaires sont excellents. Mais est ce qu’il n’y a pas un blocage électronique si le robot se retrouve dans une trop forte pente?
oui c’est ça. En fait, est ce que les pentes maxi données par les constructeurs sont des pentes théoriques au delà desquelles ils ne peuvent plus garantir que le robot va avancer, ou bien y a t’il une limite électronique via un capteur d’inclinaison ?
Moi j’avais compris que c’était une limite pour pouvoir avancer. La preuve selon les roues de constructeur tu peux gagner quelques pour-cent car tu augmente l’adhérence.
J’ai une autre question aux possesseurs de Landroid. Y a t’il une largeur minimale pour les « couloirs » de gazon que le robot peut tondre? La plupart du temps c’est au moins 60cm, mais je n’ai rien trouvé comme infos la dessus sur le site du constructeur…
j ai un landroid depuis 1 mois, et ma terrasse touche carrément ma haie, sauf que j ai une autre zone de tonte après, j ai degagé quelques branches de la haie, le landroid passe dessous (pas de soucis avec l ACS) dans un couloir de 15 cm sur 80 cm de long sans aucun soucis)
PS: ma terrasse est au meme niveau que ma pelouse je precise)
Je le sors avant que ça ne pousse trop, je n’ai plus de tondeuse de toute façon…
30% ce n’est pas énorme, si ta pente n’est pas de la gadoue il montera sans problème.
Pour le Husqvarna je ne sais pas.
Pour Worx le robot envoie les infos en wifi sur le cloud Amazon via mqtt (il s’y reconnecte automatiquement si ton terrain n’est pas 100% couvert). Le plugin se connecte sur le broker mqtt d’Amazon et reçoit les informations en temps réel. Pour être exact, le robot envoie les informations toutes les 10 min environ et à chaque changement d’état (chargement, début de tonte, blocage, soulevé, etc., si blocage en dehors de la zone de couverture wifi, pas de remontée évidemment…).
Le module RadioLink lui n’a pas de 4G, mais permet de pallier les problèmes de connexion wifi sur plusieurs centaines de mètres.
Pas que je sache, ou vraiment des pentes très fortes type « Dune du Pilat ».
Je dirais que la largeur mini est la largeur du robot auquel on ajoute l’espacement minimal possible du fil périphérique. Par contre il faut le mettre en mode coupe de bordure (il suivra le fil) car la probabilité qu’il passe par hasard dans ce couloir est très mince…
donc si je résume, chez Worx, il y a un fil périphérique, comme chez quasiment toutes les marques, mais aussi un fil de guidage qui part de la base et qui se promène dans toutes les zones à tondre, c’est bien ça ?
C’est ce fil de guidage « en plein milieu » qui me gène désormais… Car je scarifie mon gazon 1 à 2 fois par an… Il faudrait que je trouve une autre option…
Non chez Worx juste le fil périphérique. Pour les zones, le principe est simple : tu dis au robot de commencer à tondre X mètre après la base. Il suis le fil sur X mètre et commence sa tonte.
@Ssc et @ alexp
Pouvez vous rajouter dans la page d’aide du plugin
Code statut ; 33 cherche zone et 34 Pause - arrêtée
Je m’en sers pour mes scénarios, donc ça peut être bien pour les autres.
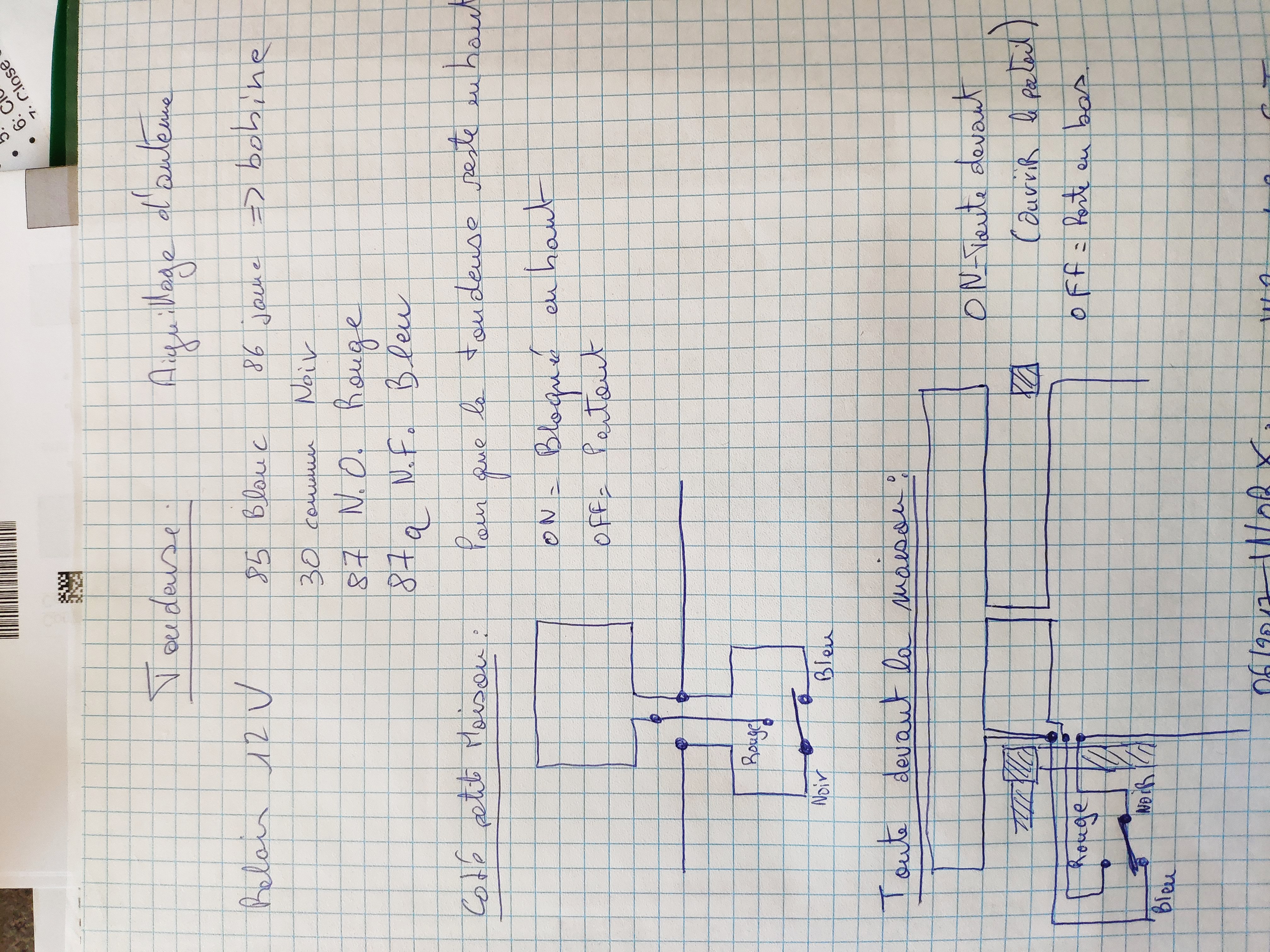
@ Snoopy, pour les zones de départ j’ai installé des « aiguillages à antenne » et mon Landroid reste dans sa zone.