Je pilote depuis longtemps mon volet roulant avec un FGR222 et un bouton Octan Remote
Je dois remplacer quelques lames PVC de mon volet qui sont cassées.
Le volet est détaché et actuellement fermé.
Donc on est un peu dans le noir
En attendant les nouvelles lames qui risquent de prendre 15 jours, j’aimerai utiliser quand meme mon volet temporairement en rattachant le rouleau au tablier raccourci.
Il manque 4 lame, si bien qu’en mode fermé il ne toucherai pas le sol
Avant de faire ça j’aimerai être sur de ce qui va se passer…
j’ai peur que le FGR ne détecte pas les debut et fin de course et qu’il continue à tourner en enroulant ou en déroulant … et du coup au risque de tout casser
Le Fgr-222 se calibre en détectant une augmentation de l’effort (surintensité).
Donc il risque de commander la rotation sans s’arrêter en cherchant la fermeture.
ok merci…
Je suis donc condamné à rester dans le noir…
Et pour ma culture, je comprend bien la surintensité quand il bute en bas, mais comment fait t’il en mode enroulé ? (le poid ?)
Autre question, avant mes FGR j’avais de simple bouton legrand qui stoppait aussi le volet tout seul …
Comment cela marchait ?
le risque est plutôt la remontée, s’il n’y a pas/plus de butée mzcz ique , le moteur va tourner plus que necessaire (valeur de 4 lames) car n’aura pas atteint sa fi. de course donc enrouler tout et sortir les lames des guides.
Une pour le haut à 80 par exemple et une pour le bas à 20.
Ainsi, il s’arrêtera avant d’aller jusqu’aux butées.
Tu peux aussi commencer par une commande à 50 et y aller progressivement dans les deux sens pour trouver les valeurs les plus appropriées.
Et aussi, pour éviter qu’un enfant passe par là et appuie par reflexe sur les boutons physiques, tu peux les désactiver avec la classe de proctection en la passant à « No operation Possible » :
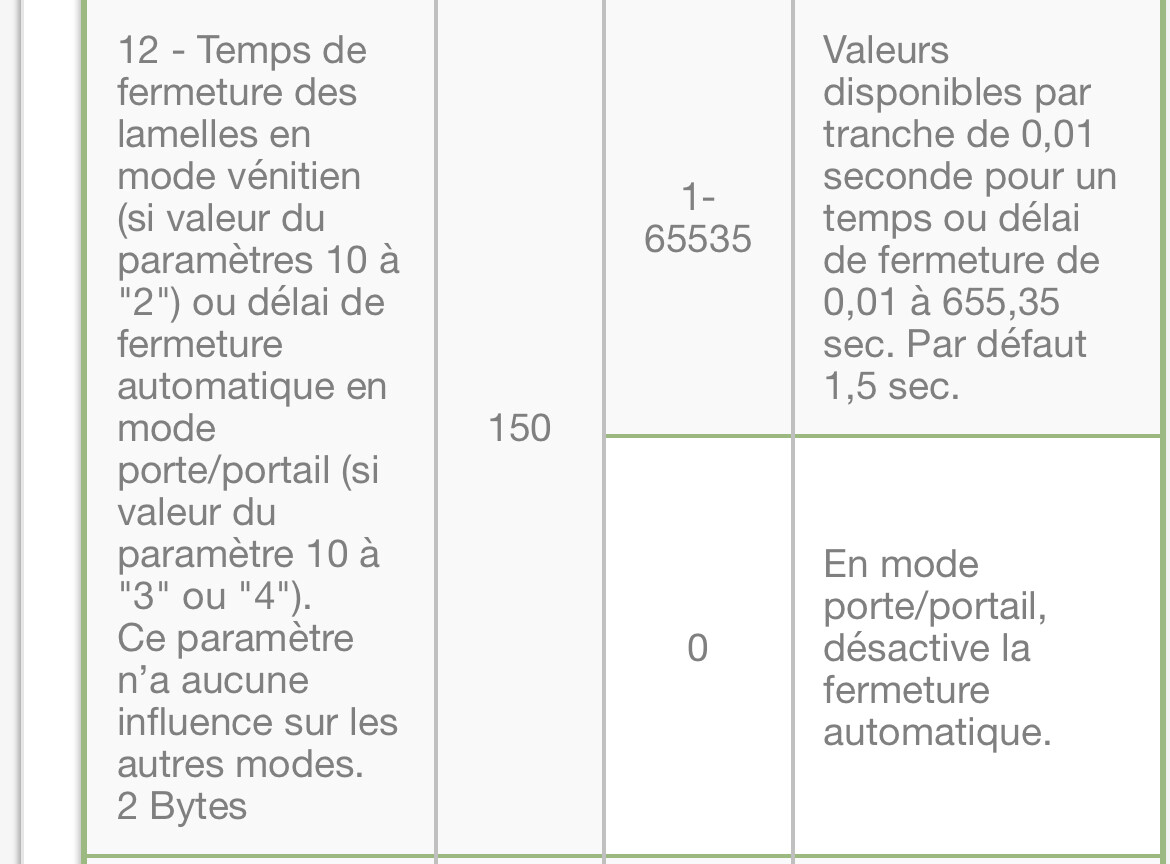
Ici peut importe qu’il y ai des butées mécaniques ou non, si tu agit sut le paramètre 150 (le temps)
Le volet va s’arrêter a la fin de ce temps de fonctionnement.
Le fait de faire un apprentissage (classique) ne fait que prendre un temps entre le mouvement et la détection de surintensité (buté).
A moins que je me trompe.
Edit : J’ai effectivement dis des bêtises …
Je confonds FGR222 et 223…
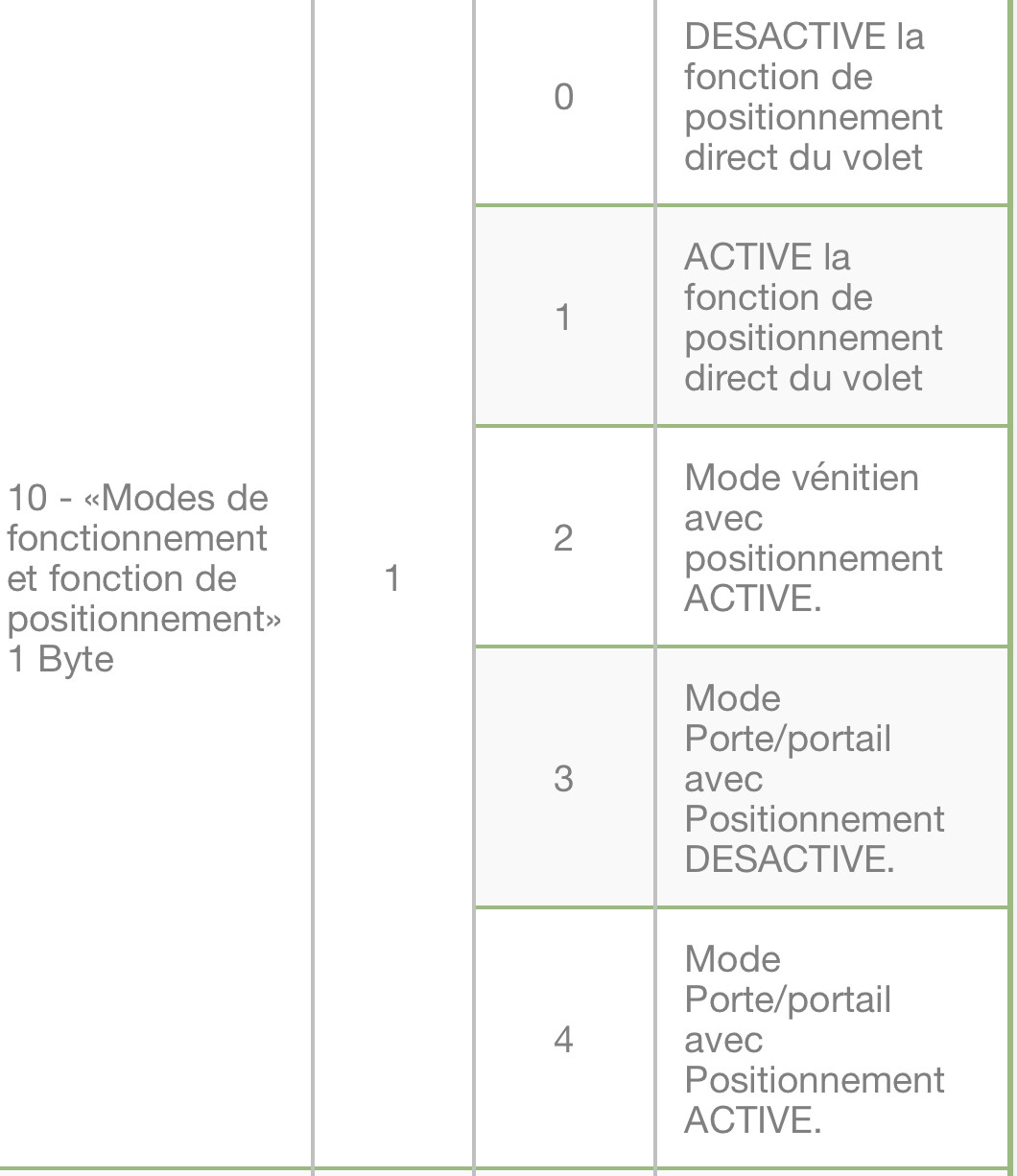
Sur le tiens (FGR222) c’est ce parametre qu’il faut setter:
Bonjour.
Je ne comprend pas j’ai changé la premiere lame, qui est un poil plus petite (5mm)
Mais le volet ne veut plus monter… il monte 3 cm et s’arrete comme si ca forcait pour lui…
Si tu as coupé le courant sur le module il peut aussi y avoir un décalage entre valeur état réel et valeur que le module à ( a confirmer si c’est le cas en zwave)
Au niveau de jeedom tu as quoi comme valeur pour l’état ?
Ce ne serait pas le condensateur du moteur qui serait fatigué ?
Cela m’est arrivé une fois sur un moteur. Pas de soucis pour la descente, en revanche, pour la montée, il commencait à se décoller puis s’arrêtait. En l’aidant à la main, il montait.
Après avoir changé le condensateur, tout était ok.
Bonsoir,
Petite précision, le fgr 222 ne détecte pas une surintensité aux butées mais le fait qu’il n’y a plus justement d’intensité.
Sur un volet avec fin de course électronique 90% de mes moteurs le fibaro coupe 1 seconde après arrêt du moteur.
Là actuellement j’ai 1 moteur qui deconne mais avec butée mécanique et quand le moteur veut pas monter ou descendre mais en tension le fgr lui reste en marche malgré la hausse d’intensité et c’est le moteur qui passe en sécurité thermique.
Bon j’ai réfléchi est j’ai compris.
Le volet etait détaché depuis 2 jours…
Du coup le rouleau avait tournée et etait en position haute quand j’ai rattaché les lames…
Du coup il forcait à mort pour essayer de fermer et ne montait plus car pour lui il était arrivé en haut …
Du coup j’ai fait tourner le rouleau en mode descente et là j’ai rataché les lames…
maintenant ca fonctionne…
je pensais l’auto calibrage assez intelligent pour tout reset et repartir à zero peu importe la posiiton du rouleau… apperement non…
J’ai jamais vraiment regarder tous les para, mais parcontre j’ai fais les mesures d’intensité sur les mouvements moteurs en temps réel par rapport au module.
Il y a que sur butées mécanique qu’il peux recalculer si l’axe moteur à été en mouvement tablier décroché, sur butées électronique il faut refaire les réglages de fin de course mais sans le module.
Sur butée meca il y a des petites pâtes sur la lame du bas ou 2 petit bouton sur l’axe moteur
Sur butée electro c’est avec un tournevis type btr
Évidemment la solution va vous sembler un peu loufoque mais tu aurais pu mettre un parpaing ou une brique de la hauteur de tes lames manquantes en attendant les nouvelles. Du coup, aucunes modifications logicielles