Bonjour à tous,
j’ai comme projet de faire communiquer Jeedom (qui tourne sur un raspberry) avec un arduino MEGA.
je m’inspire du post de Fabio133 ( https://community.jeedom.com/t/arduinodbus-coffret-i-o-sous-modbus/25329 ).
mais avant de me lancer ds la programmation de l’arduino, je voudrai confirmer le bon fonctionnement de ma liaison MODBUS.
le plugin MyModbus est pour moi bien installé au vu des infos présentes ds l’onglet configuration du plugin.
celui-ci semble également envoyer ses trames (voir dernière ligne), pour autant il semble y avoir une erreur « host value erreur » à l’initialisation de la com.
par exemple, pour la MAJ d’un bit, j’ai les infos suivantes ds le fichier LOG :
Exception in thread Thread-1:
Traceback (most recent call last):
File "/usr/lib/python2.7/threading.py", line 801, in __bootstrap_inner
self.run()
File "/usr/lib/python2.7/threading.py", line 754, in run
self.__target(*self.__args, **self.__kwargs)
File "/var/www/html/plugins/mymodbus/ressources/demon.py", line 85, in polling_thread
c = ModbusClient(host=host, port=port, unit_id=unit_id, auto_open=True, auto_close=False)
File "/usr/local/lib/python2.7/dist-packages/pyModbusTCP/client.py", line 62, in __init__
raise ValueError('host value error')
ValueError: host value error
[2021-02-15 17:06:55][INFO] : Debut de l action /usr/bin/python /var/www/html/plugins/mymodbus/ressources/mymodbus_write.py -h 192.168.0.060 -p 502 --unit_id=1 --wsc=100 --value=1 2>&1
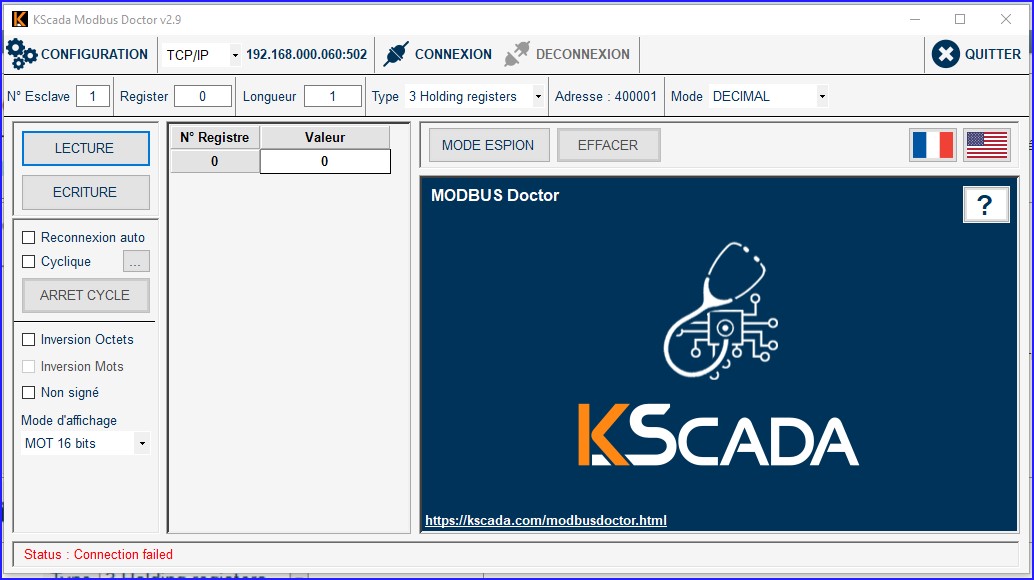
pour autant lorsque j’essaie de ctrl la communication avec ModbusDoctor ou pyModSlave, je n’arrive pas à me connecter.
avez-vous une idée ?
merci d’avance