Bonjour, toujours en galère avec ma nouvelle installaion Jeedom sur raspberry pi3b+. J’ai déjaà une mini+ qui fonctionne correctement.
Après fresh install de l’image jeedom pi stretch, l’installation du plugin Zwave a priori OK. Déasactivation du Bluetooth OK. Cotrolleru zwave SUC. Mais quand je passe en exclusion aucun module reconnu… même à 10 cm de la box. Heelp s’il vous plaît j’y suis depuis une semaine mini.
Merci d’avance pour vos contributions.
Seb
Bonjour,
Si tu veux faire reconnaître un module tu dis faire une inclusion; faute de frappe ?
Sinon quel config sur le plug-in zwave ?
Peux tu montrer les logs ?
Merci de prendre le temps de me répondre.
Alors je me suis mal exprimé : quand je passe en exclusion le controlleur n’exclu rien du tout. Et en inclusion rien non plus…
Voici le log openzwaved
Lancement de l'installation/mise à jour des dépendances openzwave
Get:1 http://raspbian.raspberrypi.org/raspbian stretch InRelease [15.0 kB]
Get:2 http://archive.raspberrypi.org/debian stretch InRelease [25.4 kB]
Fetched 40.3 kB in 1s (24.1 kB/s)
Reading package lists...
Installation des dependances
Reading package lists...
Building dependency tree...
Reading state information...
build-essential is already the newest version (12.3).
g++ is already the newest version (4:6.3.0-4).
gcc is already the newest version (4:6.3.0-4).
git is already the newest version (1:2.11.0-3+deb9u5).
libjpeg-dev is already the newest version (1:1.5.1-2).
libudev-dev is already the newest version (232-25+deb9u12).
make is already the newest version (4.1-9.1).
python-dev is already the newest version (2.7.13-2).
python-louie is already the newest version (1.1-2.1).
python-lxml is already the newest version (3.7.1-1).
python-pyudev is already the newest version (0.21.0-1).
python-requests is already the newest version (2.12.4-1).
python-serial is already the newest version (3.2.1-1).
python-setuptools is already the newest version (33.1.1-1).
unzip is already the newest version (6.0-21+deb9u2).
python-pip is already the newest version (9.0.1-2+rpt2).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
Installation des dependances Python
Requirement already satisfied: urwid in /usr/local/lib/python2.7/dist-packages
Requirement already satisfied: louie in /usr/lib/python2.7/dist-packages
Requirement already satisfied: nose>=0.8.3 in /usr/lib/python2.7/dist-packages (from louie)
Requirement already satisfied: six in /usr/lib/python2.7/dist-packages
Requirement already satisfied: tornado in /usr/local/lib/python2.7/dist-packages
Requirement already satisfied: singledispatch in /usr/local/lib/python2.7/dist-packages (from tornado)
Requirement already satisfied: futures in /usr/local/lib/python2.7/dist-packages (from tornado)
Requirement already satisfied: backports-abc>=0.4 in /usr/local/lib/python2.7/dist-packages (from tornado)
Requirement already satisfied: six in /usr/lib/python2.7/dist-packages (from singledispatch->tornado)
mkdir: cannot create directory '/opt': File exists
Désinstallation de la version précédente
Installation de Python-OpenZwave
Not uninstalling cython at /usr/lib/python2.7/dist-packages, outside environment /usr
apt-get install --force-yes -y cython
Reading package lists...
Building dependency tree...
Reading state information...
cython is already the newest version (0.25.2-1).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
Installing dependencies for python : 2 7 13
apt-get install --force-yes -y python-pip python-dev python-docutils python-setuptools python-louie
Reading package lists...
Building dependency tree...
Reading state information...
python-dev is already the newest version (2.7.13-2).
python-docutils is already the newest version (0.13.1+dfsg-2).
python-louie is already the newest version (1.1-2.1).
python-setuptools is already the newest version (33.1.1-1).
python-pip is already the newest version (9.0.1-2+rpt2).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
apt-get install --force-yes -y build-essential libudev-dev g++
Reading package lists...
Building dependency tree...
Reading state information...
build-essential is already the newest version (12.3).
g++ is already the newest version (4:6.3.0-4).
libudev-dev is already the newest version (232-25+deb9u12).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
apt-get install --force-yes -y cython
Reading package lists...
Building dependency tree...
Reading state information...
cython is already the newest version (0.25.2-1).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
pip install nose-html
Requirement already satisfied: nose-html in /usr/local/lib/python2.7/dist-packages
Requirement already satisfied: nose>=0.11.1 in /usr/lib/python2.7/dist-packages (from nose-html)
pip install nose-progressive
Requirement already satisfied: nose-progressive in /usr/local/lib/python2.7/dist-packages
Requirement already satisfied: nose>=1.2.1 in /usr/lib/python2.7/dist-packages (from nose-progressive)
Requirement already satisfied: blessings<2.0,>=1.3 in /usr/local/lib/python2.7/dist-packages (from nose-progressive)
Requirement already satisfied: six in /usr/lib/python2.7/dist-packages (from blessings<2.0,>=1.3->nose-progressive)
pip install coverage
Requirement already satisfied: coverage in /usr/local/lib/python2.7/dist-packages
pip install nose
Requirement already satisfied: nose in /usr/lib/python2.7/dist-packages
pip install pylint
Requirement already satisfied: pylint in /usr/local/lib/python2.7/dist-packages
Requirement already satisfied: singledispatch; python_version < "3.4" in /usr/local/lib/python2.7/dist-packages (from pylint)
Requirement already satisfied: mccabe in /usr/local/lib/python2.7/dist-packages (from pylint)
Requirement already satisfied: configparser; python_version == "2.7" in /usr/local/lib/python2.7/dist-packages (from pylint)
Requirement already satisfied: astroid<2.0,>=1.6 in /usr/local/lib/python2.7/dist-packages (from pylint)
Requirement already satisfied: isort>=4.2.5 in /usr/local/lib/python2.7/dist-packages (from pylint)
Requirement already satisfied: backports.functools-lru-cache; python_version == "2.7" in /usr/local/lib/python2.7/dist-packages (from pylint)
Requirement already satisfied: six in /usr/lib/python2.7/dist-packages (from pylint)
Requirement already satisfied: enum34>=1.1.3; python_version < "3.4" in /usr/lib/python2.7/dist-packages (from astroid<2.0,>=1.6->pylint)
Requirement already satisfied: lazy-object-proxy in /usr/local/lib/python2.7/dist-packages (from astroid<2.0,>=1.6->pylint)
Requirement already satisfied: wrapt in /usr/local/lib/python2.7/dist-packages (from astroid<2.0,>=1.6->pylint)
Requirement already satisfied: futures; python_version < "3.2" in /usr/local/lib/python2.7/dist-packages (from isort>=4.2.5->pylint)
#pip install docutils
#pip install setuptools
#The following line crashes with a core dump
#pip install "Cython==0.22"
Dependencies for users installed (python 2 7 13)
sed -i -e '253s/.*//' openzwave/cpp/src/value_classes/ValueID.h
cd openzwave && make
make[1]: Entering directory '/opt/python-openzwave/openzwave'
CPPFLAGS= make -C /opt/python-openzwave/openzwave/cpp/build/ -w
make[2]: Entering directory '/opt/python-openzwave/openzwave/cpp/build'
Building OpenZWave Version 1.4.-1
Building tinystr.o
Building tinyxmlerror.o
Building tinyxml.o
Building tinyxmlparser.o
Building hid.o
Building aeskey.o
Building aescrypt.o
Building aestab.o
Building aes_modes.o
Building SensorAlarm.o
Building Proprietary.o
Building SwitchToggleMultilevel.o
Building BarrierOperator.o
Building Language.o
Building WakeUp.o
Building Color.o
Building ZWavePlusInfo.o
Building MeterPulse.o
Building ThermostatFanMode.o
Building Configuration.o
Building SwitchToggleBinary.o
Building Hail.o
Building ThermostatMode.o
Building SensorMultilevel.o
Building MultiInstance.o
Building SwitchMultilevel.o
Building UserCode.o
Building TimeParameters.o
Building ManufacturerSpecific.o
In file included from /usr/include/c++/6/map:60:0,
from /opt/python-openzwave/openzwave/cpp/src/command_classes/CommandClasses.h:32,
from /opt/python-openzwave/openzwave/cpp/src/command_classes/ManufacturerSpecific.cpp:28:
/usr/include/c++/6/bits/stl_tree.h: In function 'std::_Rb_tree<_Key, _Val, _KeyOfValue, _Compare, _Alloc>::iterator std::_Rb_tree<_Key, _Val, _KeyOfValue, _Compare, _Alloc>::_M_emplace_hint_unique(std::_Rb_tree<_Key, _Val, _KeyOfValue, _Compare, _Alloc>::const_iterator, _Args&& ...) [with _Args = {const std::piecewise_construct_t&, std::tuple<long long int&&>, std::tuple<>}; _Key = long long int; _Val = std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*>; _KeyOfValue = std::_Select1st<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >; _Compare = std::less<long long int>; _Alloc = std::allocator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >]':
/usr/include/c++/6/bits/stl_tree.h:2193:7: note: parameter passing for argument of type 'std::_Rb_tree<long long int, std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*>, std::_Select1st<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >, std::less<long long int>, std::allocator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> > >::const_iterator {aka std::_Rb_tree_const_iterator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >}' will change in GCC 7.1
_Rb_tree<_Key, _Val, _KeyOfValue, _Compare, _Alloc>::
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
In file included from /usr/include/c++/6/map:61:0,
from /opt/python-openzwave/openzwave/cpp/src/command_classes/CommandClasses.h:32,
from /opt/python-openzwave/openzwave/cpp/src/command_classes/ManufacturerSpecific.cpp:28:
/usr/include/c++/6/bits/stl_map.h: In static member function 'static bool OpenZWave::ManufacturerSpecific::LoadProductXML()':
/usr/include/c++/6/bits/stl_map.h:502:4: note: parameter passing for argument of type 'std::_Rb_tree<long long int, std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*>, std::_Select1st<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >, std::less<long long int>, std::allocator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> > >::const_iterator {aka std::_Rb_tree_const_iterator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >}' will change in GCC 7.1
__i = _M_t._M_emplace_hint_unique(__i, std::piecewise_construct,
^~~
/usr/include/c++/6/bits/stl_map.h:502:4: note: parameter passing for argument of type 'std::_Rb_tree<long long int, std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*>, std::_Select1st<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >, std::less<long long int>, std::allocator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> > >::const_iterator {aka std::_Rb_tree_const_iterator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >}' will change in GCC 7.1
__i = _M_t._M_emplace_hint_unique(__i, std::piecewise_construct,
^~~
/usr/include/c++/6/bits/stl_map.h:502:4: note: parameter passing for argument of type 'std::_Rb_tree<long long int, std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*>, std::_Select1st<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >, std::less<long long int>, std::allocator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> > >::const_iterator {aka std::_Rb_tree_const_iterator<std::pair<const long long int, OpenZWave::ManufacturerSpecific::Product*> >}' will change in GCC 7.1
__i = _M_t._M_emplace_hint_unique(__i, std::piecewise_construct,
^~~
Building ThermostatFanState.o
Building Indicator.o
Building CRC16Encap.o
Building SoundSwitch.o
Building ApplicationStatus.o
Building DoorLockLogging.o
Building ClimateControlSchedule.o
Building Protection.o
Building NodeNaming.o
Building ManufacturerProprietary.o
Building BasicWindowCovering.o
Building Lock.o
Building Association.o
Building MultiCmd.o
Building SceneActivation.o
Building CentralScene.o
Building Powerlevel.o
Building DoorLock.o
Building CommandClass.o
Building AssociationCommandConfiguration.o
Building ThermostatOperatingState.o
Building Battery.o
Building MultiChannelAssociation.o
Building Version.o
Building Security.o
Building SensorBinary.o
Building Meter.o
Building Clock.o
Building Alarm.o
Building CommandClasses.o
Building ThermostatSetpoint.o
Building NoOperation.o
Building EnergyProduction.o
Building Basic.o
Building SwitchAll.o
Building DeviceResetLocally.o
Building ControllerReplication.o
Building SwitchBinary.o
Building Value.o
Building ValueList.o
Building ValueButton.o
Building ValueInt.o
Building ValueStore.o
Building ValueDecimal.o
Building ValueRaw.o
Building ValueString.o
Building ValueByte.o
Building ValueBool.o
Building ValueSchedule.o
Building ValueShort.o
Building Wait.o
Building Thread.o
Building Controller.o
Building Stream.o
Building Log.o
Building HidController.o
Building Mutex.o
Building SerialController.o
Building Event.o
Building FileOps.o
Building TimeStamp.o
Building FileOpsImpl.o
Building TimeStampImpl.o
Building WaitImpl.o
Building ThreadImpl.o
Building LogImpl.o
Building MutexImpl.o
Building SerialControllerImpl.o
Building EventImpl.o
Building Options.o
Building Scene.o
Building Utils.o
Building Driver.o
Building ZWSecurity.o
Building Group.o
Building Node.o
Building Manager.o
Building Msg.o
Building Notification.o
Creating vers.cpp
Building vers.o
Linking Static Library
Linking Shared Library
Making ozw_config file
make[2]: Leaving directory '/opt/python-openzwave/openzwave/cpp/build'
CPPFLAGS= make -C /opt/python-openzwave/openzwave/cpp/examples/MinOZW/ -w
make[2]: Entering directory '/opt/python-openzwave/openzwave/cpp/examples/MinOZW'
Building Main.o
Linking /opt/python-openzwave/openzwave/.lib/MinOZW
g++ -o /opt/python-openzwave/openzwave/.lib/MinOZW /opt/python-openzwave/openzwave/.lib/Main.o /opt/python-openzwave/openzwave/libopenzwave.so -pthread
Creating Temporary Shell Launch Script
make[2]: Leaving directory '/opt/python-openzwave/openzwave/cpp/examples/MinOZW'
make[1]: Leaving directory '/opt/python-openzwave/openzwave'
python setup-lib.py build
running build
running build_ext
cythoning src-lib/libopenzwave/libopenzwave.pyx to src-lib/libopenzwave/libopenzwave.cpp
building 'libopenzwave' extension
creating build
creating build/temp.linux-armv7l-2.7
creating build/temp.linux-armv7l-2.7/src-lib
creating build/temp.linux-armv7l-2.7/src-lib/libopenzwave
arm-linux-gnueabihf-gcc -pthread -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fno-strict-aliasing -Wdate-time -D_FORTIFY_SOURCE=2 -g -fdebug-prefix-map=/build/python2.7-Ub3vap/python2.7-2.7.13=. -fstack-protector-strong -Wformat -Werror=format-security -fPIC -DPY_SSIZE_T_CLEAN=1 -Iopenzwave/cpp/src/ -Iopenzwave/cpp/src/value_classes/ -Iopenzwave/cpp/src/platform/ -Iopenzwave/cpp/build/linux/ -I/usr/include/python2.7 -c src-lib/libopenzwave/libopenzwave.cpp -o build/temp.linux-armv7l-2.7/src-lib/libopenzwave/libopenzwave.o
src-lib/libopenzwave/libopenzwave.cpp:3:0: warning: "PY_SSIZE_T_CLEAN" redefined
#define PY_SSIZE_T_CLEAN
<command-line>:0:0: note: this is the location of the previous definition
In file included from openzwave/cpp/src/aes/aescpp.h:26:0,
from openzwave/cpp/src/Driver.h:42,
from src-lib/libopenzwave/libopenzwave.cpp:459:
openzwave/cpp/src/aes/aes.h:75:0: warning: ignoring #pragma warning [-Wunknown-pragmas]
#pragma warning( disable : 4324 )
openzwave/cpp/src/aes/aes.h:93:0: warning: ignoring #pragma warning [-Wunknown-pragmas]
#pragma warning( default : 4324 )
src-lib/libopenzwave/libopenzwave.cpp: In function 'PyObject* __pyx_pf_12libopenzwave_9PyManager_268beginControllerCommand(__pyx_obj_12libopenzwave_PyManager*, PyObject*, PyObject*, PyObject*, PyObject*, PyObject*, PyObject*)':
src-lib/libopenzwave/libopenzwave.cpp:29891:204: warning: 'bool OpenZWave::Manager::BeginControllerCommand(uint32, OpenZWave::Driver::ControllerCommand, OpenZWave::Driver::pfnControllerCallback_t, void*, bool, uint8, uint8)' is deprecated [-Wdeprecated-declarations]
__pyx_t_6 = __Pyx_PyBool_FromLong(__pyx_v_self->manager->BeginControllerCommand(__pyx_t_1, __pyx_t_2, __pyx_f_12libopenzwave_ctrl_callback, ((void *)__pyx_v_pythonfunc), __pyx_t_3, __pyx_t_4, __pyx_t_5)); if (unlikely(!__pyx_t_6)) __PYX_ERR(0, 4120, __pyx_L1_error)
^
src-lib/libopenzwave/libopenzwave.cpp:545:36: note: in definition of macro '__Pyx_PyBool_FromLong'
#define __Pyx_PyBool_FromLong(b) ((b) ? __Pyx_NewRef(Py_True) : __Pyx_NewRef(Py_False))
^
In file included from src-lib/libopenzwave/libopenzwave.cpp:464:0:
openzwave/cpp/src/Manager.h:1731:19: note: declared here
DEPRECATED bool BeginControllerCommand( uint32 const _homeId, Driver::ControllerCommand _command, Driver::pfnControllerCallback_t _callback = NULL, void* _context = NULL, bool _highPower = false, uint8 _nodeId = 0xff, uint8 _arg = 0 );
^~~~~~~~~~~~~~~~~~~~~~
creating build/lib.linux-armv7l-2.7
arm-linux-gnueabihf-g++ -pthread -shared -Wl,-O1 -Wl,-Bsymbolic-functions -Wl,-z,relro -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -Wdate-time -D_FORTIFY_SOURCE=2 -g -fdebug-prefix-map=/build/python2.7-Ub3vap/python2.7-2.7.13=. -fstack-protector-strong -Wformat -Werror=format-security -Wl,-z,relro -Wdate-time -D_FORTIFY_SOURCE=2 -g -fdebug-prefix-map=/build/python2.7-Ub3vap/python2.7-2.7.13=. -fstack-protector-strong -Wformat -Werror=format-security build/temp.linux-armv7l-2.7/src-lib/libopenzwave/libopenzwave.o openzwave/libopenzwave.a -ludev -lstdc++ -o build/lib.linux-armv7l-2.7/libopenzwave.so
python setup-lib.py install
running install
running bdist_egg
running egg_info
creating src-lib/libopenzwave.egg-info
writing requirements to src-lib/libopenzwave.egg-info/requires.txt
writing src-lib/libopenzwave.egg-info/PKG-INFO
writing top-level names to src-lib/libopenzwave.egg-info/top_level.txt
writing dependency_links to src-lib/libopenzwave.egg-info/dependency_links.txt
writing manifest file 'src-lib/libopenzwave.egg-info/SOURCES.txt'
reading manifest file 'src-lib/libopenzwave.egg-info/SOURCES.txt'
writing manifest file 'src-lib/libopenzwave.egg-info/SOURCES.txt'
installing library code to build/bdist.linux-armv7l/egg
running install_lib
running build_ext
creating build/bdist.linux-armv7l/egg
copying build/lib.linux-armv7l-2.7/libopenzwave.so -> build/bdist.linux-armv7l/egg
creating stub loader for libopenzwave.so
byte-compiling build/bdist.linux-armv7l/egg/libopenzwave.py to libopenzwave.pyc
installing package data to build/bdist.linux-armv7l/egg
running install_data
creating build/bdist.linux-armv7l/egg/config
creating build/bdist.linux-armv7l/egg/EGG-INFO
copying src-lib/libopenzwave.egg-info/PKG-INFO -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-lib/libopenzwave.egg-info/SOURCES.txt -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-lib/libopenzwave.egg-info/dependency_links.txt -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-lib/libopenzwave.egg-info/not-zip-safe -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-lib/libopenzwave.egg-info/requires.txt -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-lib/libopenzwave.egg-info/top_level.txt -> build/bdist.linux-armv7l/egg/EGG-INFO
writing build/bdist.linux-armv7l/egg/EGG-INFO/native_libs.txt
creating dist
creating 'dist/libopenzwave-0.3.1-py2.7-linux-armv7l.egg' and adding 'build/bdist.linux-armv7l/egg' to it
removing 'build/bdist.linux-armv7l/egg' (and everything under it)
Processing libopenzwave-0.3.1-py2.7-linux-armv7l.egg
creating /usr/local/lib/python2.7/dist-packages/libopenzwave-0.3.1-py2.7-linux-armv7l.egg
Extracting libopenzwave-0.3.1-py2.7-linux-armv7l.egg to /usr/local/lib/python2.7/dist-packages
Adding libopenzwave 0.3.1 to easy-install.pth file
Installed /usr/local/lib/python2.7/dist-packages/libopenzwave-0.3.1-py2.7-linux-armv7l.egg
Processing dependencies for libopenzwave==0.3.1
Searching for six==1.12.0
Best match: six 1.12.0
Adding six 1.12.0 to easy-install.pth file
Using /usr/lib/python2.7/dist-packages
Finished processing dependencies for libopenzwave==0.3.1
Installation of lib finished.
python setup-api.py install
running install
running bdist_egg
running egg_info
creating src-api/openzwave.egg-info
writing requirements to src-api/openzwave.egg-info/requires.txt
writing src-api/openzwave.egg-info/PKG-INFO
writing top-level names to src-api/openzwave.egg-info/top_level.txt
writing dependency_links to src-api/openzwave.egg-info/dependency_links.txt
writing manifest file 'src-api/openzwave.egg-info/SOURCES.txt'
reading manifest file 'src-api/openzwave.egg-info/SOURCES.txt'
writing manifest file 'src-api/openzwave.egg-info/SOURCES.txt'
installing library code to build/bdist.linux-armv7l/egg
running install_lib
running build_py
creating build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/value.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/node.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/scene.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/command.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/group.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/controller.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/network.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/__init__.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/option.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/singleton.py -> build/lib.linux-armv7l-2.7/openzwave
copying src-api/openzwave/object.py -> build/lib.linux-armv7l-2.7/openzwave
creating build/bdist.linux-armv7l/egg
creating build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/value.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/node.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/scene.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/command.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/group.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/controller.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/network.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/__init__.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/option.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/singleton.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/openzwave/object.py -> build/bdist.linux-armv7l/egg/openzwave
copying build/lib.linux-armv7l-2.7/libopenzwave.so -> build/bdist.linux-armv7l/egg
byte-compiling build/bdist.linux-armv7l/egg/openzwave/value.py to value.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/node.py to node.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/scene.py to scene.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/command.py to command.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/group.py to group.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/controller.py to controller.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/network.py to network.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/__init__.py to __init__.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/option.py to option.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/singleton.py to singleton.pyc
byte-compiling build/bdist.linux-armv7l/egg/openzwave/object.py to object.pyc
creating build/bdist.linux-armv7l/egg/EGG-INFO
copying src-api/openzwave.egg-info/PKG-INFO -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-api/openzwave.egg-info/SOURCES.txt -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-api/openzwave.egg-info/dependency_links.txt -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-api/openzwave.egg-info/not-zip-safe -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-api/openzwave.egg-info/requires.txt -> build/bdist.linux-armv7l/egg/EGG-INFO
copying src-api/openzwave.egg-info/top_level.txt -> build/bdist.linux-armv7l/egg/EGG-INFO
writing build/bdist.linux-armv7l/egg/EGG-INFO/native_libs.txt
creating 'dist/openzwave-0.3.1-py2.7.egg' and adding 'build/bdist.linux-armv7l/egg' to it
removing 'build/bdist.linux-armv7l/egg' (and everything under it)
Processing openzwave-0.3.1-py2.7.egg
creating /usr/local/lib/python2.7/dist-packages/openzwave-0.3.1-py2.7.egg
Extracting openzwave-0.3.1-py2.7.egg to /usr/local/lib/python2.7/dist-packages
Adding openzwave 0.3.1 to easy-install.pth file
Installed /usr/local/lib/python2.7/dist-packages/openzwave-0.3.1-py2.7.egg
Processing dependencies for openzwave==0.3.1
Searching for libopenzwave==0.3.1
Best match: libopenzwave 0.3.1
Processing libopenzwave-0.3.1-py2.7-linux-armv7l.egg
libopenzwave 0.3.1 is already the active version in easy-install.pth
Using /usr/local/lib/python2.7/dist-packages/libopenzwave-0.3.1-py2.7-linux-armv7l.egg
Searching for Louie==1.1
Best match: Louie 1.1
Adding Louie 1.1 to easy-install.pth file
Using /usr/lib/python2.7/dist-packages
Searching for six==1.12.0
Best match: six 1.12.0
Adding six 1.12.0 to easy-install.pth file
Using /usr/lib/python2.7/dist-packages
Searching for nose==1.3.7
Best match: nose 1.3.7
Adding nose 1.3.7 to easy-install.pth file
Installing nosetests script to /usr/local/bin
Installing nosetests-2.7 script to /usr/local/bin
Using /usr/lib/python2.7/dist-packages
Finished processing dependencies for openzwave==0.3.1
Installation of API finished.
sed: can't read /etc/inittab: No such file or directory
Everything is successfully installed!
La carte est bien soit en exclusion soit en inclusion (les voyants sur la carte s’allument). Porte clé Zwave : Raspberry pi (/tty/AMA0) port 8083. J’ai essayé avec port auto => carte pas reconnue. avec port vide=> même résultat. Cycle 0.3.
Dépendances OK Demon OK.
Mais le démon en mode débug et redémarres le et montre le log
Log du plugin
[2020-01-25 03:18:20][INFO] : 200 GET /network?type=info&info=getStatus&apikey=******* (127.0.0.1) 5.82ms
[2020-01-25 03:18:25][INFO] : node info getNodeStatistics
[2020-01-25 03:18:25][INFO] : 200 GET /node?node_id=1&type=info&info=getNodeStatistics&apikey=******* (127.0.0.1) 6.48ms
[2020-01-25 03:18:25][INFO] : 200 GET /network?type=info&info=getNodesList&apikey=******* (127.0.0.1) 7.36ms
[2020-01-25 03:18:25][INFO] : node info all
[2020-01-25 03:18:25][INFO] : 200 GET /node?node_id=1&type=info&info=all&apikey=******* (127.0.0.1) 7.05ms
[2020-01-25 03:18:27][INFO] : node info all
[2020-01-25 03:18:27][INFO] : 200 GET /node?node_id=1&type=info&info=all&apikey=******* (127.0.0.1) 14.37ms
[2020-01-25 03:18:30][INFO] : node info all
[2020-01-25 03:18:30][INFO] : 200 GET /node?node_id=1&type=info&info=all&apikey=******* (127.0.0.1) 14.42ms
[2020-01-25 03:18:32][INFO] : node info all
[2020-01-25 03:18:32][INFO] : 200 GET /node?node_id=1&type=info&info=all&apikey=******* (127.0.0.1) 14.90ms
[2020-01-25 03:18:34][INFO] : node info all
[2020-01-25 03:18:34][INFO] : 200 GET /node?node_id=1&type=info&info=all&apikey=******* (127.0.0.1) 14.41ms
[2020-01-25 03:18:36][INFO] : node info all
[2020-01-25 03:18:36][INFO] : 200 GET /node?node_id=1&type=info&info=all&apikey=******* (127.0.0.1) 14.24ms
[2020-01-25 12:48:43][INFO] : 200 GET /network?type=info&info=getStatus&apikey=******* (127.0.0.1) 6.01ms
[2020-01-25 12:49:04][INFO] : Graceful stopping the ZWave network.
[2020-01-25 12:49:04][INFO] : Stop Openzwave network.
[2020-01-25 12:49:04][DEBUG] : Wait for empty send_queue during 0 second(s).
[2020-01-25 12:49:04][INFO] : ZWave configuration written to user directory.
[2020-01-25 12:49:09][INFO] : Openzwave network are Network is stopped
[2020-01-25 12:49:09][DEBUG] : disconnect the louie dispatcher
[2020-01-25 12:49:09][INFO] : The Openzwave REST-server was stopped in a normal way
[2020-01-25 12:49:09][INFO] : Backup xml config file with mode: stop
[2020-01-25 12:49:09][INFO] : Xml config file successfully backup
[2020-01-25 13:49:12][INFO] : Lancement démon openzwave : /usr/bin/python /var/www/html/plugins/openzwave/core/class/../../resources/openzwaved/openzwaved.py --device /dev/ttyAMA0 --loglevel debug --port 8083 --config_folder /var/www/html/plugins/openzwave/core/class/../../resources/openzwaved/config --data_folder /var/www/html/plugins/openzwave/core/class/../../data --callback http://127.0.0.1:80/plugins/openzwave/core/php/jeeZwave.php --apikey ******* --suppressRefresh 0 --cycle 0.3 --pid /tmp/jeedom/openzwave/deamon.pid
[2020-01-25 12:49:13][INFO] : Start openzwaved
[2020-01-25 12:49:13][INFO] : Log level : debug
[2020-01-25 12:49:13][DEBUG] : PID file : /tmp/jeedom/openzwave/deamon.pid
[2020-01-25 12:49:13][INFO] : Device : /dev/ttyAMA0
[2020-01-25 12:49:13][DEBUG] : Apikey : *******
[2020-01-25 12:49:13][INFO] : Callback : http://127.0.0.1:80/plugins/openzwave/core/php/jeeZwave.php
[2020-01-25 12:49:13][INFO] : Cycle : 0.3
[2020-01-25 12:49:13][DEBUG] : Initial disabled nodes list: []
[2020-01-25 12:49:13][DEBUG] : Init request module v2.12.4
[2020-01-25 12:49:13][DEBUG] : Starting new HTTP connection (1): 127.0.0.1
[2020-01-25 12:49:13][DEBUG] : http://127.0.0.1:80 "GET /plugins/openzwave/core/php/jeeZwave.php?apikey=******* HTTP/1.1" 200 0
[2020-01-25 12:49:13][INFO] : Check if the port REST server available
[2020-01-25 12:49:13][INFO] : --> pass
[2020-01-25 12:49:13][INFO] : Check OpenZWave Devices Database
[2020-01-25 12:49:13][INFO] : --> pass
[2020-01-25 12:49:13][INFO] : Validate zwcfg configuration file(s)
[2020-01-25 12:49:13][INFO] : ... check: /var/www/html/plugins/openzwave/core/class/../../data/zwcfg_0xd3a63173.xml
[2020-01-25 12:49:13][DEBUG] : Create network object.
[2020-01-25 12:49:13][DEBUG] : Use sqlite version : (u'3.16.2',)
[2020-01-25 12:49:13][DEBUG] : connect to the louie dispatcher
[2020-01-25 12:49:13][INFO] : ******** The ZWave network is being started ********
[2020-01-25 12:49:13][INFO] : Start Openzwave network.
[2020-01-25 12:49:13][INFO] : OpenZwave Library Version 1.4.0
[2020-01-25 12:49:13][INFO] : Python-OpenZwave Wrapper Version 0.3.1
[2020-01-25 12:49:13][INFO] : --> pass
[2020-01-25 12:49:13][INFO] : Waiting for network to become ready
[2020-01-25 12:49:13][DEBUG] : Writing PID 7407 to /tmp/jeedom/openzwave/deamon.pid
[2020-01-25 12:49:14][DEBUG] : notif_callback : new notification
[2020-01-25 12:49:14][DEBUG] : notif_callback : Notification type : 18, nodeId : 1
[2020-01-25 12:49:14][DEBUG] : notif_callback : call callback context
[2020-01-25 12:49:14][DEBUG] : zwcallback args=[{'homeId': 3550884211L, 'notificationType': 'DriverReady', 'nodeId': 1}]
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification DriverReady : {'homeId': 3550884211L, 'notificationType': 'DriverReady', 'nodeId': 1}
[2020-01-25 12:49:14][DEBUG] : Create object node (node_id:1)
[2020-01-25 12:49:14][INFO] : Driver ready using library Static Controller version Z-Wave 6.02
[2020-01-25 12:49:14][INFO] : home_id 0xd3a63173, controller node id is 1
[2020-01-25 12:49:14][DEBUG] : Network home_id: [0xd3a63173] controller: [home_id: [0xd3a63173] id: [1] name: [1 RaZberry Controller 2016 ZWave ] product: [RaZberry Controller 2016 ZWave+] capabilities: set(['primaryController', 'staticUpdateController']) library: [Static Controller version Z-Wave 6.02]]
[2020-01-25 12:49:14][INFO] : Openzwave network are started with homeId d3a63173.
[2020-01-25 12:49:14][DEBUG] : notif_callback : end
[2020-01-25 12:49:14][DEBUG] : notif_callback : new notification
[2020-01-25 12:49:14][DEBUG] : notif_callback : Notification type : 6, nodeId : 1
[2020-01-25 12:49:14][DEBUG] : notif_callback : call callback context
[2020-01-25 12:49:14][DEBUG] : zwcallback args=[{'homeId': 3550884211L, 'notificationType': 'NodeAdded', 'nodeId': 1}]
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification NodeAdded : {'homeId': 3550884211L, 'notificationType': 'NodeAdded', 'nodeId': 1}
[2020-01-25 12:49:14][DEBUG] : Create object node (node_id:1)
[2020-01-25 12:49:14][INFO] : A node has been added to OpenZWave list id:[1] model:[RaZberry Controller 2016 ZWave+].
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification Node : home_id: [0xd3a63173] id: [1] name: [1 RaZberry Controller 2016 ZWave ] model: [RaZberry Controller 2016 ZWave+]
[2020-01-25 12:49:14][DEBUG] : notif_callback : end
[2020-01-25 12:49:14][DEBUG] : notif_callback : new notification
[2020-01-25 12:49:14][DEBUG] : notif_callback : Notification type : 8, nodeId : 1
[2020-01-25 12:49:14][DEBUG] : notif_callback : call callback context
[2020-01-25 12:49:14][DEBUG] : zwcallback args=[{'homeId': 3550884211L, 'notificationType': 'NodeProtocolInfo', 'nodeId': 1}]
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification NodeProtocolInfo : {'homeId': 3550884211L, 'notificationType': 'NodeProtocolInfo', 'nodeId': 1}
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification Node : home_id: [0xd3a63173] id: [1] name: [1 RaZberry Controller 2016 ZWave ] model: [RaZberry Controller 2016 ZWave+]
[2020-01-25 12:49:14][DEBUG] : notif_callback : end
[2020-01-25 12:49:14][DEBUG] : notif_callback : new notification
[2020-01-25 12:49:14][DEBUG] : notif_callback : Notification type : 21, nodeId : 1
[2020-01-25 12:49:14][DEBUG] : notif_callback : call callback context
[2020-01-25 12:49:14][DEBUG] : zwcallback args=[{'homeId': 3550884211L, 'notificationType': 'EssentialNodeQueriesComplete', 'nodeId': 1}]
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification EssentialNodeQueriesComplete : {'homeId': 3550884211L, 'notificationType': 'EssentialNodeQueriesComplete', 'nodeId': 1}
[2020-01-25 12:49:14][DEBUG] : notif_callback : end
[2020-01-25 12:49:14][DEBUG] : notif_callback : new notification
[2020-01-25 12:49:14][DEBUG] : notif_callback : Notification type : 0, nodeId : 1
[2020-01-25 12:49:14][DEBUG] : addValueId : ValueID : 72057594055229441
[2020-01-25 12:49:14][DEBUG] : addValueId : GetCommandClassId : 32, GetType : 1
[2020-01-25 12:49:14][DEBUG] : addValueId : Notification : {'homeId': 3550884211L, 'valueId': {'index': 0, 'units': None, 'type': 'Byte', 'nodeId': 1, 'value': None, 'commandClass': 'COMMAND_CLASS_BASIC', 'instance': 1, 'readOnly': False, 'homeId': 3550884211L, 'label': None, 'genre': '', 'id': 72057594055229441L}, 'notificationType': 'ValueAdded', 'nodeId': 1}
[2020-01-25 12:49:14][DEBUG] : notif_callback : call callback context
[2020-01-25 12:49:14][DEBUG] : zwcallback args=[{'homeId': 3550884211L, 'valueId': {'index': 0, 'units': None, 'type': 'Byte', 'nodeId': 1, 'value': None, 'commandClass': 'COMMAND_CLASS_BASIC', 'instance': 1, 'readOnly': False, 'homeId': 3550884211L, 'label': None, 'genre': '', 'id': 72057594055229441L}, 'notificationType': 'ValueAdded', 'nodeId': 1}]
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification ValueAdded : {'homeId': 3550884211L, 'valueId': {'index': 0, 'units': None, 'type': 'Byte', 'nodeId': 1, 'value': None, 'commandClass': 'COMMAND_CLASS_BASIC', 'instance': 1, 'readOnly': False, 'homeId': 3550884211L, 'label': None, 'genre': '', 'id': 72057594055229441L}, 'notificationType': 'ValueAdded', 'nodeId': 1}
[2020-01-25 12:49:14][DEBUG] : Create object value (valueId:72057594055229441)
[2020-01-25 12:49:14][DEBUG] : notif_callback : end
[2020-01-25 12:49:14][DEBUG] : notif_callback : new notification
[2020-01-25 12:49:14][DEBUG] : notif_callback : Notification type : 9, nodeId : 1
[2020-01-25 12:49:14][DEBUG] : notif_callback : call callback context
[2020-01-25 12:49:14][DEBUG] : zwcallback args=[{'homeId': 3550884211L, 'notificationType': 'NodeNaming', 'nodeId': 1}]
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification NodeNaming : {'homeId': 3550884211L, 'notificationType': 'NodeNaming', 'nodeId': 1}
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification Node : home_id: [0xd3a63173] id: [1] name: [1 RaZberry Controller 2016 ZWave ] model: [RaZberry Controller 2016 ZWave+]
[2020-01-25 12:49:14][DEBUG] : notif_callback : end
[2020-01-25 12:49:14][DEBUG] : notif_callback : new notification
[2020-01-25 12:49:14][DEBUG] : notif_callback : Notification type : 22, nodeId : 1
[2020-01-25 12:49:14][DEBUG] : notif_callback : call callback context
[2020-01-25 12:49:14][DEBUG] : zwcallback args=[{'homeId': 3550884211L, 'notificationType': 'NodeQueriesComplete', 'nodeId': 1}]
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification NodeQueriesComplete : {'homeId': 3550884211L, 'notificationType': 'NodeQueriesComplete', 'nodeId': 1}
[2020-01-25 12:49:14][INFO] : All the initialisation queries on a node have been completed. id:[1] model:[RaZberry Controller 2016 ZWave+].
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification Node : home_id: [0xd3a63173] id: [1] name: [1 RaZberry Controller 2016 ZWave ] model: [RaZberry Controller 2016 ZWave+]
[2020-01-25 12:49:14][DEBUG] : notif_callback : end
[2020-01-25 12:49:14][DEBUG] : notif_callback : new notification
[2020-01-25 12:49:14][DEBUG] : notif_callback : Notification type : 25, nodeId : 255
[2020-01-25 12:49:14][DEBUG] : notif_callback : call callback context
[2020-01-25 12:49:14][DEBUG] : zwcallback args=[{'homeId': 3550884211L, 'notificationType': 'AllNodesQueried', 'nodeId': 255}]
[2020-01-25 12:49:14][DEBUG] : Z-Wave Notification AllNodesQueried : {'homeId': 3550884211L, 'notificationType': 'AllNodesQueried', 'nodeId': 255}
[2020-01-25 12:49:14][INFO] : Openzwave network is ready with 1 nodes (0 are sleeping). All nodes are queried, the network is fully functional.
[2020-01-25 12:49:14][INFO] : ZWave configuration written to user directory.
[2020-01-25 12:49:14][INFO] : write configuration file
[2020-01-25 12:49:14][DEBUG] : Send to jeedom : {'network': {'state': {'value': 5}}}
[2020-01-25 12:49:14][DEBUG] : Starting new HTTP connection (1): 127.0.0.1
[2020-01-25 12:49:14][DEBUG] : http://127.0.0.1:80 "POST /plugins/openzwave/core/php/jeeZwave.php?apikey=xxxxxxxxxxxxxxxxxx HTTP/1.1" 200 0
[2020-01-25 13:49:14][INFO] : Démon openzwave lancé
[2020-01-25 12:49:15][DEBUG] : notif_callback : end
[2020-01-25 12:49:15][DEBUG] : Send to jeedom : {'network': {'state': {'value': 10}}}
[2020-01-25 12:49:15][DEBUG] : Starting new HTTP connection (1): 127.0.0.1
[2020-01-25 12:49:15][DEBUG] : http://127.0.0.1:80 "POST /plugins/openzwave/core/php/jeeZwave.php?apikey=xxxxxxxxxxxxxxxxxxxxxx HTTP/1.1" 200 0
Voici le log en mode DEBUG
Salut,
Attention il y avait des clés api visibles dans tes logs au-dessus. J’ai remplacé par des étoiles j’espère ne pas en avoir oublié.
Ho merci. J’en avais enlevé mais pas toutes non plus a priori…
@anon53349806 . Je me permets de te relancer. Verrais tu quelque chose à exploiter dans mes logs ? Merci.
Montres nous la page santé de jeedom et la page configuration du plugin…
Le seul truc que j’aime pas trop dans le log est sed: can’t read /etc/inittab: No such file or directory
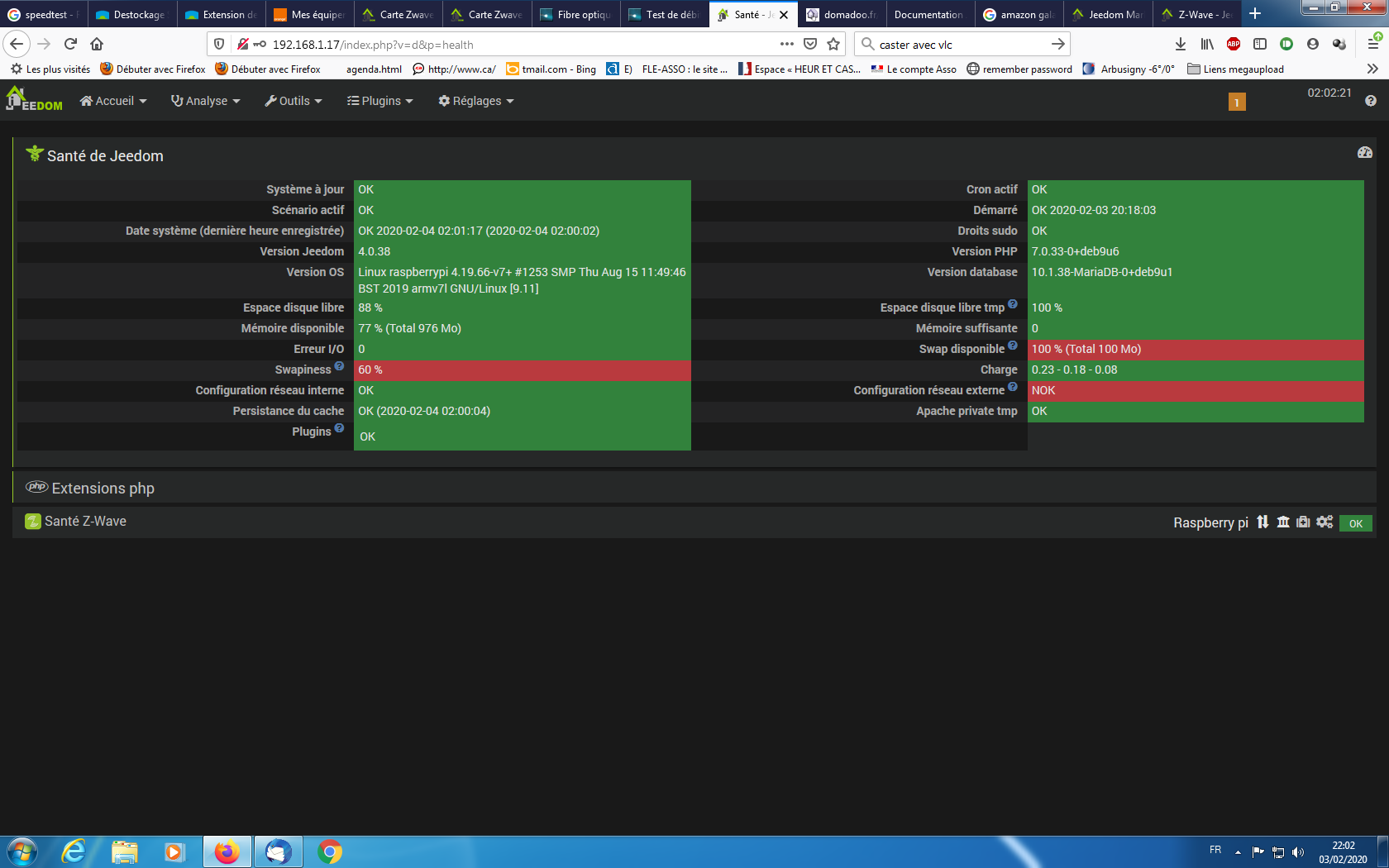
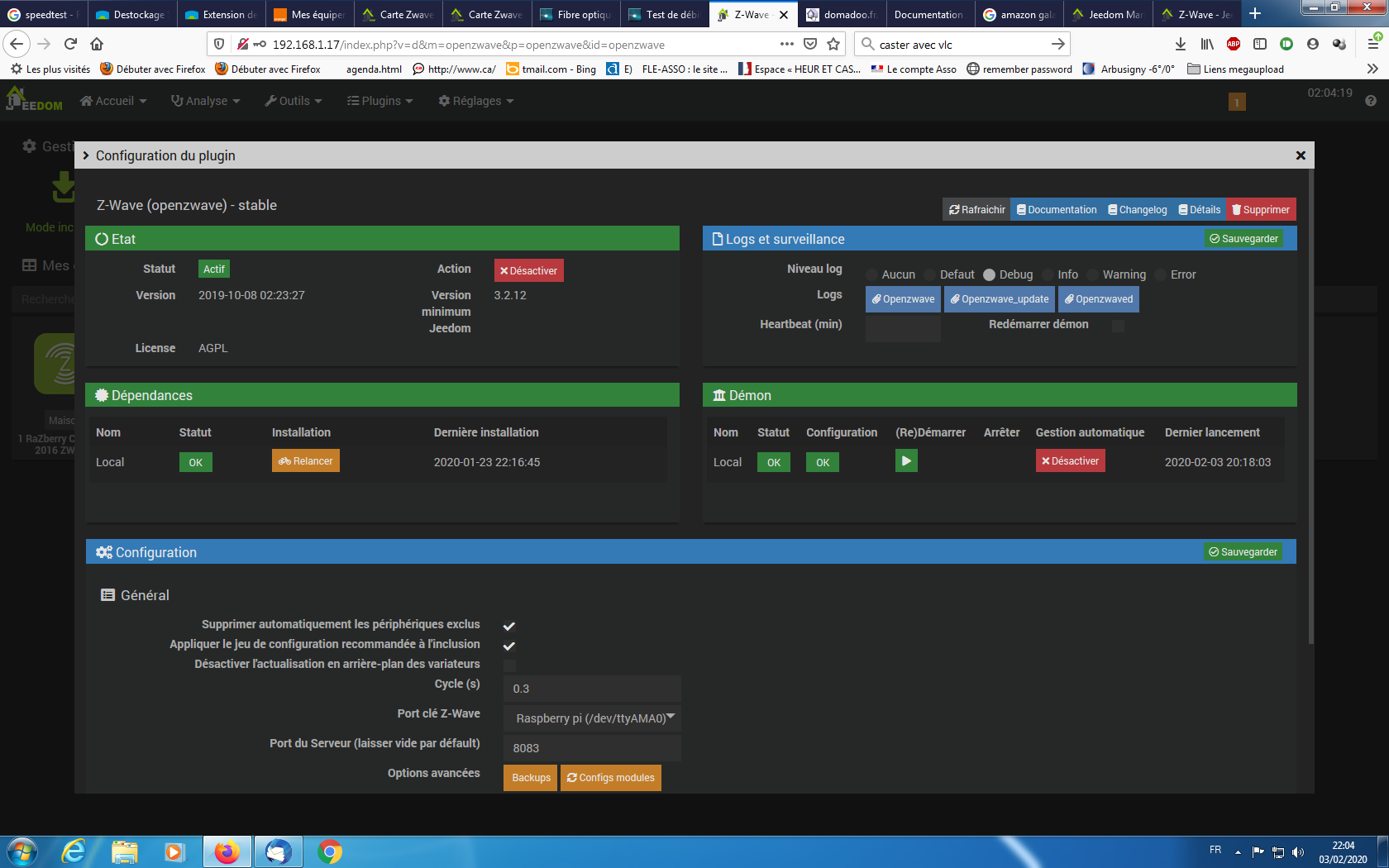
et la page configuration du plugin.
Effectivement sur le log je ne voyais que sed: can’t read /etc/inittab: No such file or directory mais ne sais pas ni a quoi c’est dû, ni comment rectifier.
Sinon ce problème est sur cette config en strecth et jeedom V4, et j’avais le même problème sur la 1ère installation du rpi3b+ en burst et jeedom V3… Serait-ce la carte razberry, dfécetueuse dans la partie émission/réception ???
Salut,
J’ai peut-être raté l’info mais ton raspi tourne t’il sur une carte sd?
Oui pour l’instant. Je dois commander un ssd. Ca pourrait impacter le fonctionnement de la razberry ?
Salut Grandseb
Pour ta dernière question, je peux te répondre 
Que ton raspi fonctionne sur SSD ou carte SD n’impacte pas le fonctionnement de la razberry
Bonjour,
Après moult tergiversation, le comportement de la carte semblait OK. Les voyants lors de l’autotest OK et lors de passage en inclusion ou exclusion OK. Cela faisait comme si la carte ne communiquait pas avec les modules. J’ai donc pensé à un problème de fréquence. Vérification de la référence de la carte → c’est bien la référence pour l’europe. J’ai trouvé le manuel complet (https://z-wave.me/essentials) et vu qu’il était possible de changer la zone, et donc la fréquence avec Zway server. J’ai donc réinstaller un rasbian avec Zway server et la miracle. La carte était paramétrée sur la zone India (alors que c’est la zone Europe par défaut…). J’ai remis en zone Europe et c’est tout bon.
Seule question : pourquoi cette carte, achetée neuve n’avait pas le paramétrage par défaut ???
Ce sujet a été automatiquement fermé après 24 heures suivant le dernier commentaire. Aucune réponse n’est permise dorénavant.